Help! lossing data from camera + IMU tracking
-
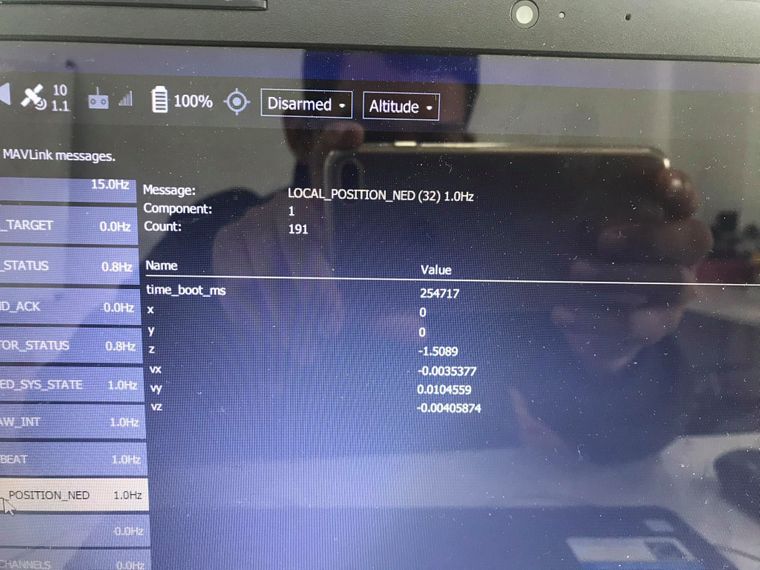
Hello, im working with m500 drone. when i starting with ROS, i was calibration camera here. after that m500 cannot display the value of x,y in NED position in QGC (just remain Z value). after reading document i think the SNAV was reset after i ran config command. it's right?
Then the solution is recalib the Modalai Visio Lib at here? but what is the selection for IMU and tracking camera? Please confirm if i miss anything.
-
Hello,
The M500 should have been sent to you all configured and working. Do you mind stopping the voxl-vision-px4 service and running voxl-test-vision-lib to see if VIO is working? You can use the following commands:
systemctl stop voxl-vision-px4
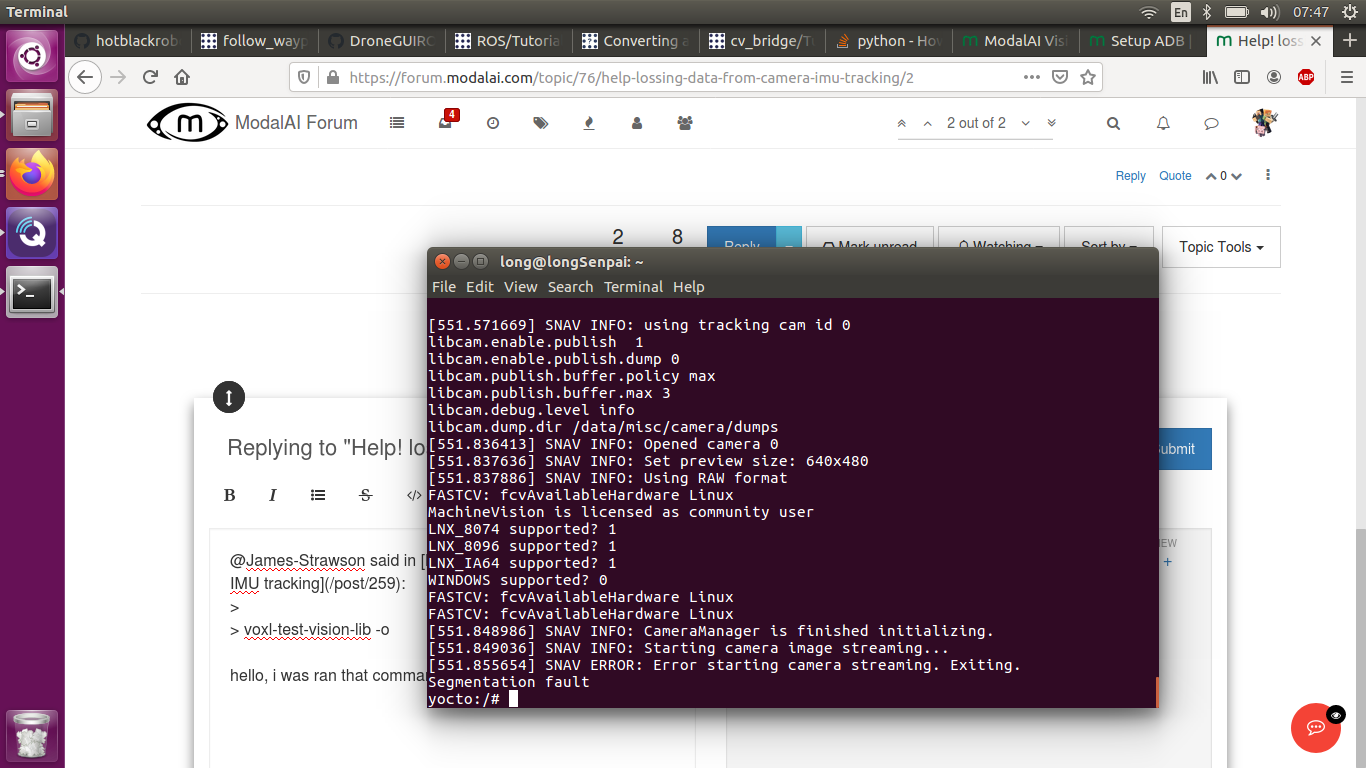
voxl-test-vision-lib -o -
@James-Strawson said in Help! lossing data from camera + IMU tracking:
voxl-test-vision-lib -o
hello, i was ran that command and it's have an error.
-
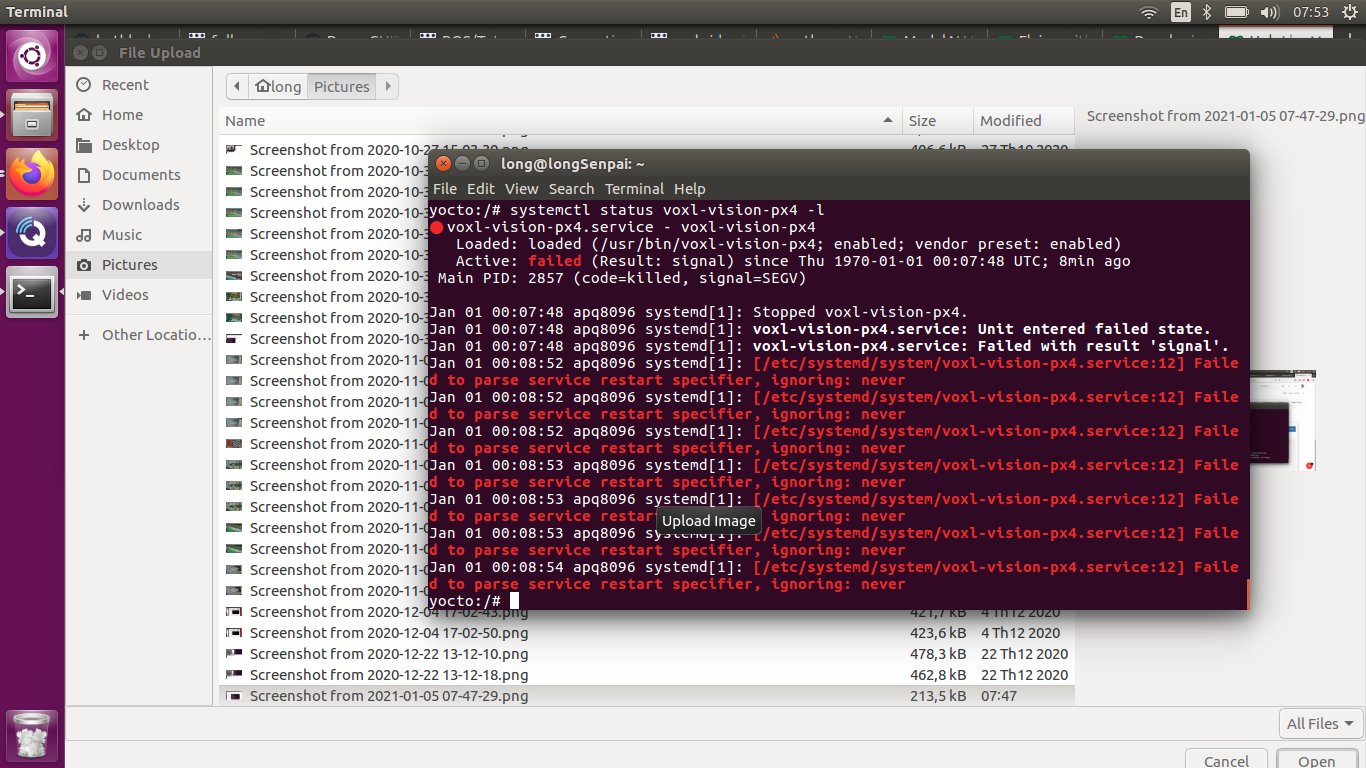
@Vũ-Văn-Long and after i run command check the status
-
Problem Solved. for anyone in the future have similar case just perform factory configuration for VOXL Flight Deck by
"voxl-configure-vision-px4 -f" and then re-connect to QGC and you will see the miracle. -
@Vũ-Văn-Long wow amazing goodjob