Starling 2 Max TOF Depth Data Not Publishing
-
I am currently setting up a TOF sensor on my Straling 2 Max drone and have followed the configuration steps provided in your official documentation. I am using the VOXL Web UI to monitor the sensor data.
The TOF sensor appears to be recognized by the system — in the Web UI, I can see the TOF IR (infrared) stream, indicating that the sensor is connected and active. However, I do not see any output for the TOF Depth or Confidence (conf) data — the corresponding image feeds are blank or not updating.

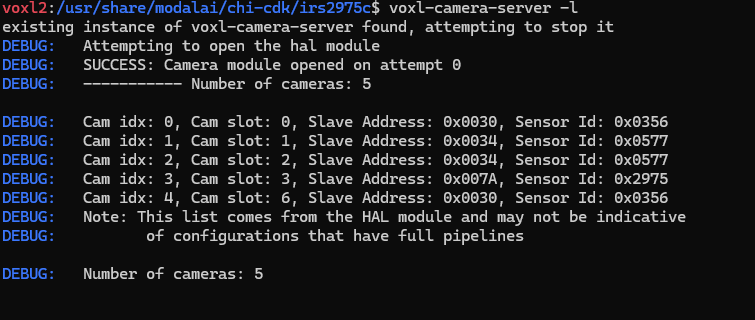
Here is the output of voxl-camera-server -l, which shows that the system detects 5 cameras, including the TOF sensor:
-
Here is the output of voxl-camera-server -l, which shows that the system detects 5 cameras, including the TOF sensor:
Hi @Jing-Yu,
Does the feed for tof_depth change when you move your drone?
-
Hi @Jing-Yu,
Does the feed for tof_depth change when you move your drone?
@teddy-zaremba
No, only tof_IR responds. tof_depth always shows 0 no matter what I do or how I move the drone. -
@teddy-zaremba
No, only tof_IR responds. tof_depth always shows 0 no matter what I do or how I move the drone.@Jing-Yu what SDK are you using? My TOF is working with SDK 1.4.5. I'll try to replicate your setup the best I can but I'm suspicious because the TOF IR is working and the TOF depth pipe is receiving frames in your setup. In the meantime, can you try pointing the TOF sensor at something very far away?
-
@Jing-Yu what SDK are you using? My TOF is working with SDK 1.4.5. I'll try to replicate your setup the best I can but I'm suspicious because the TOF IR is working and the TOF depth pipe is receiving frames in your setup. In the meantime, can you try pointing the TOF sensor at something very far away?
@teddy-zaremba
Hi,Thanks for your message.
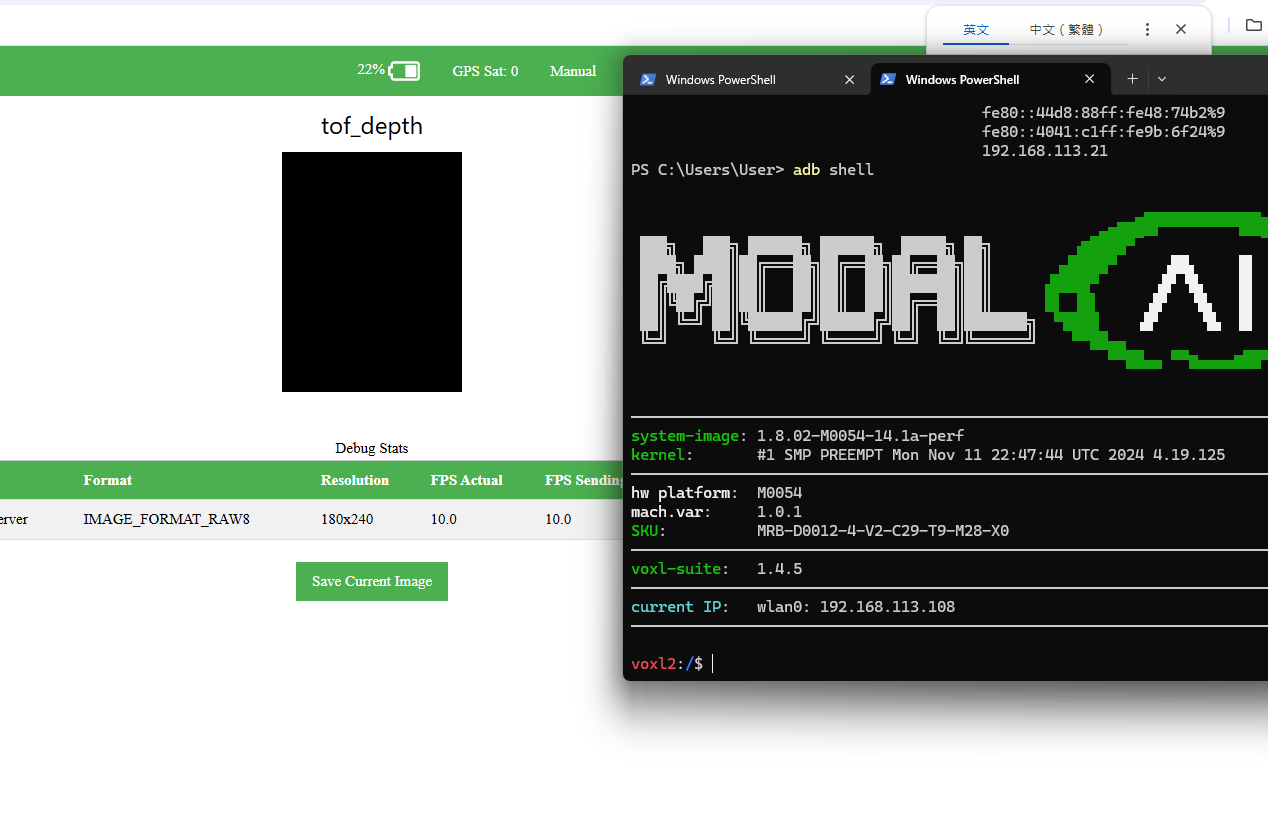
I'm currently using SDK version 1.4.1, as shown in the screenshot below.
To be honest, I'm not entirely sure whether the TOF IR output is functioning normally, since I don’t know what the expected output should look like. My TOF IR view shows some noise and scattered light spots in the image — I’ve attached a screenshot below for reference.
Additionally, I’ve pointed the TOF sensor at a wall approximately 10 meters away, but there was no visible response or change in the output.

-
@teddy-zaremba
Hi,Thanks for your message.
I'm currently using SDK version 1.4.1, as shown in the screenshot below.
To be honest, I'm not entirely sure whether the TOF IR output is functioning normally, since I don’t know what the expected output should look like. My TOF IR view shows some noise and scattered light spots in the image — I’ve attached a screenshot below for reference.
Additionally, I’ve pointed the TOF sensor at a wall approximately 10 meters away, but there was no visible response or change in the output.
To Modalai Team:
Regarding your first question — when I switch to the TOF Depth view in Portal, the screen is always completely black, and the depth values stay at 0. There is no visible image or noise.
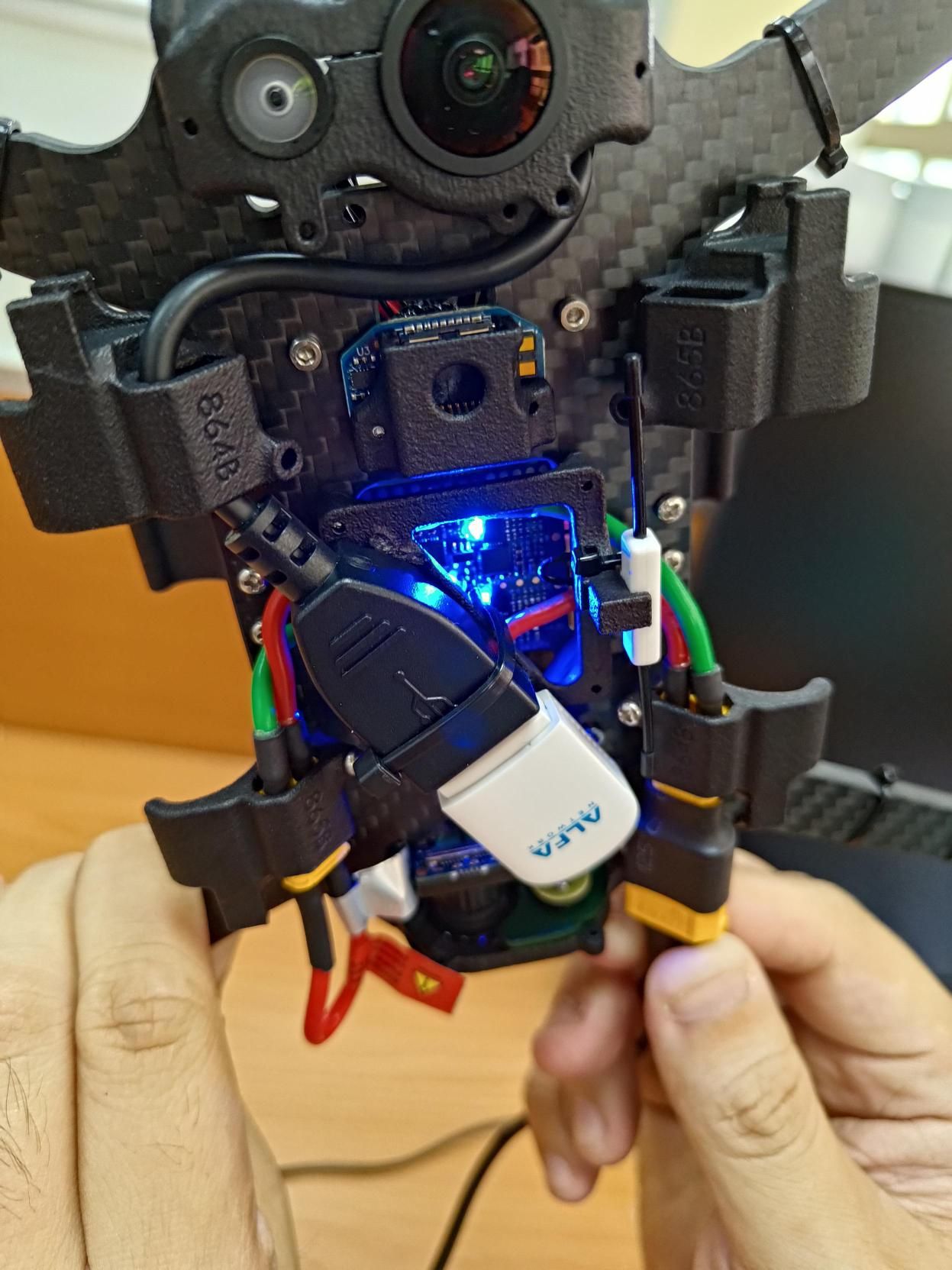
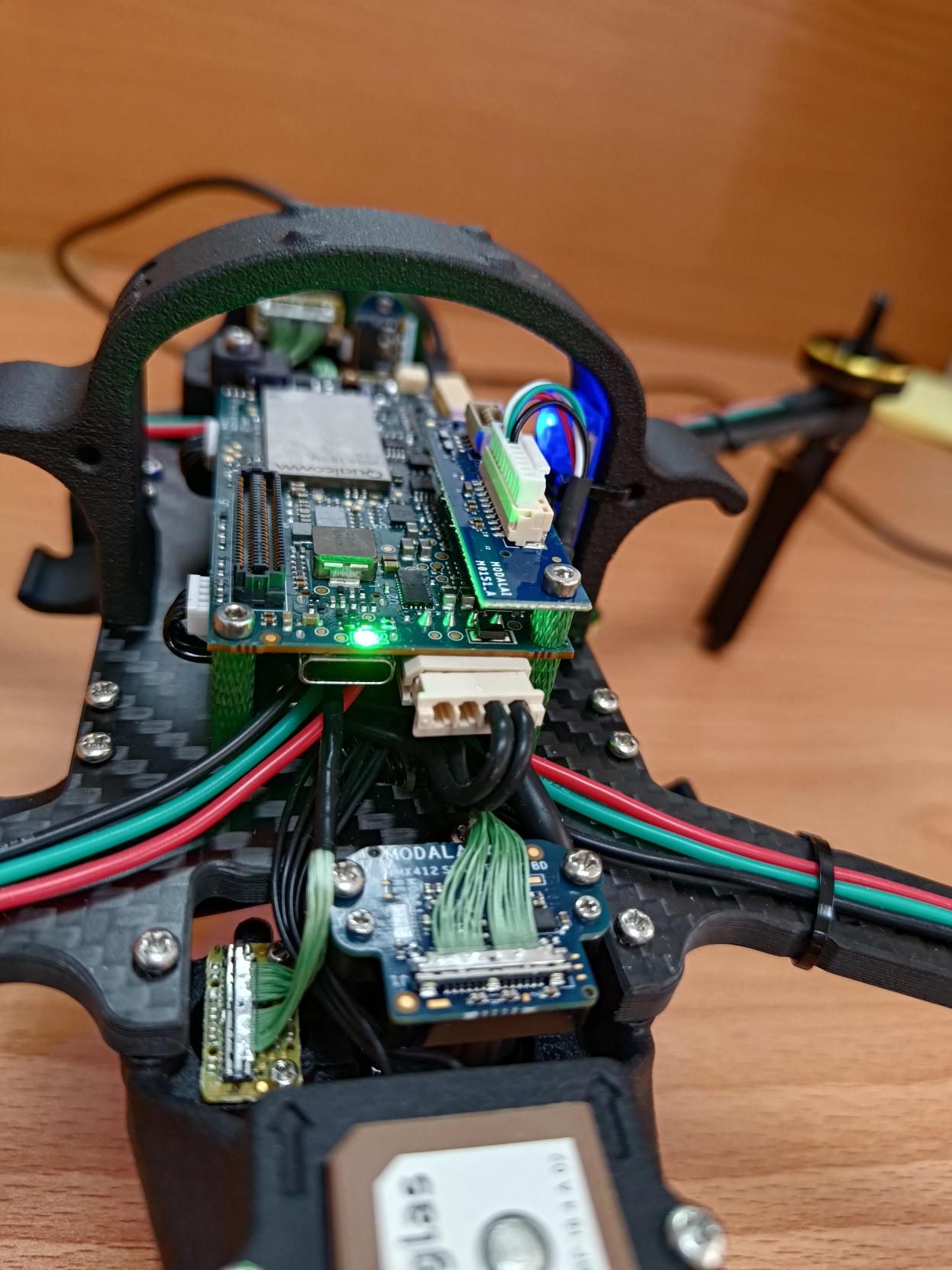
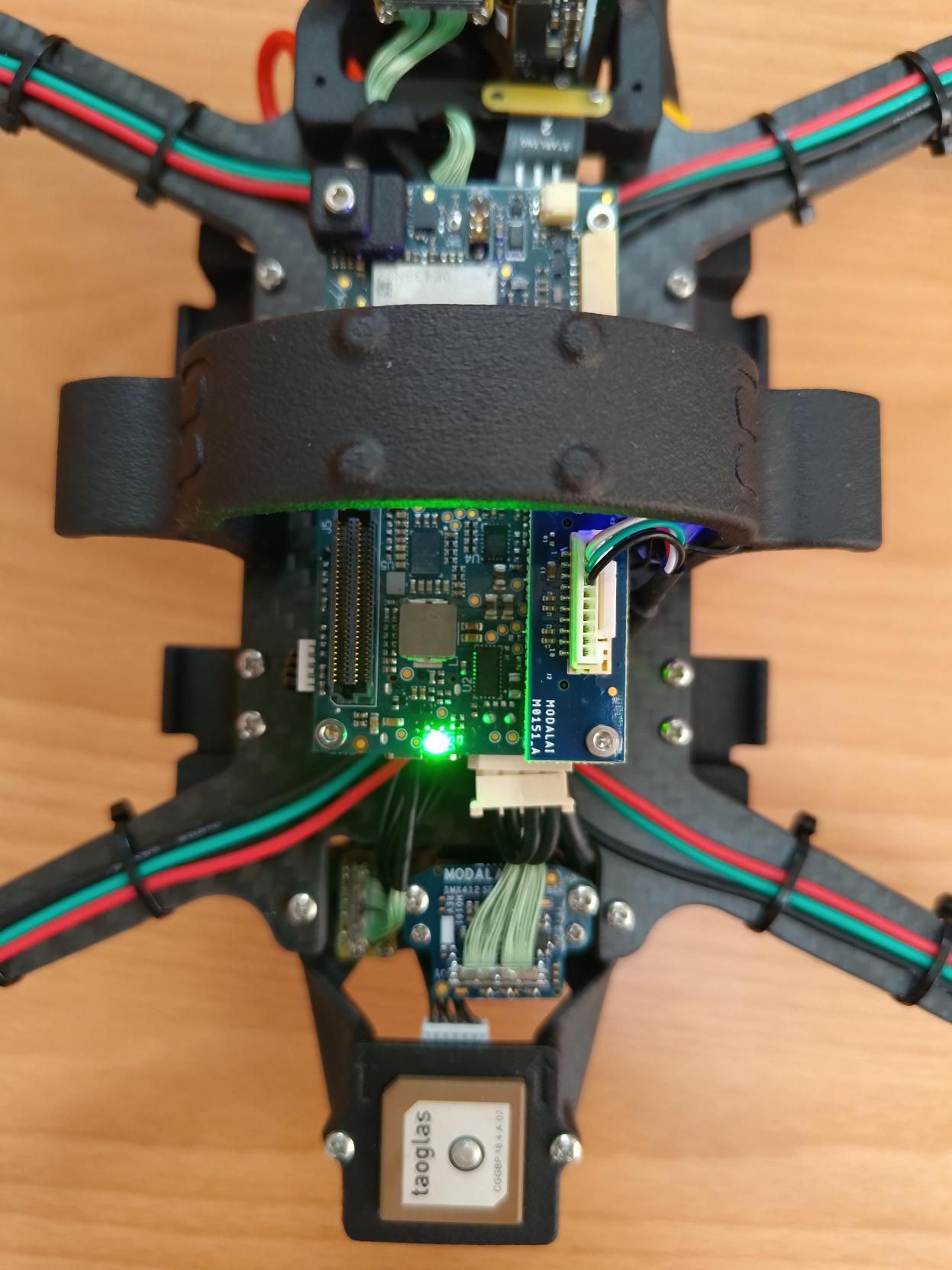
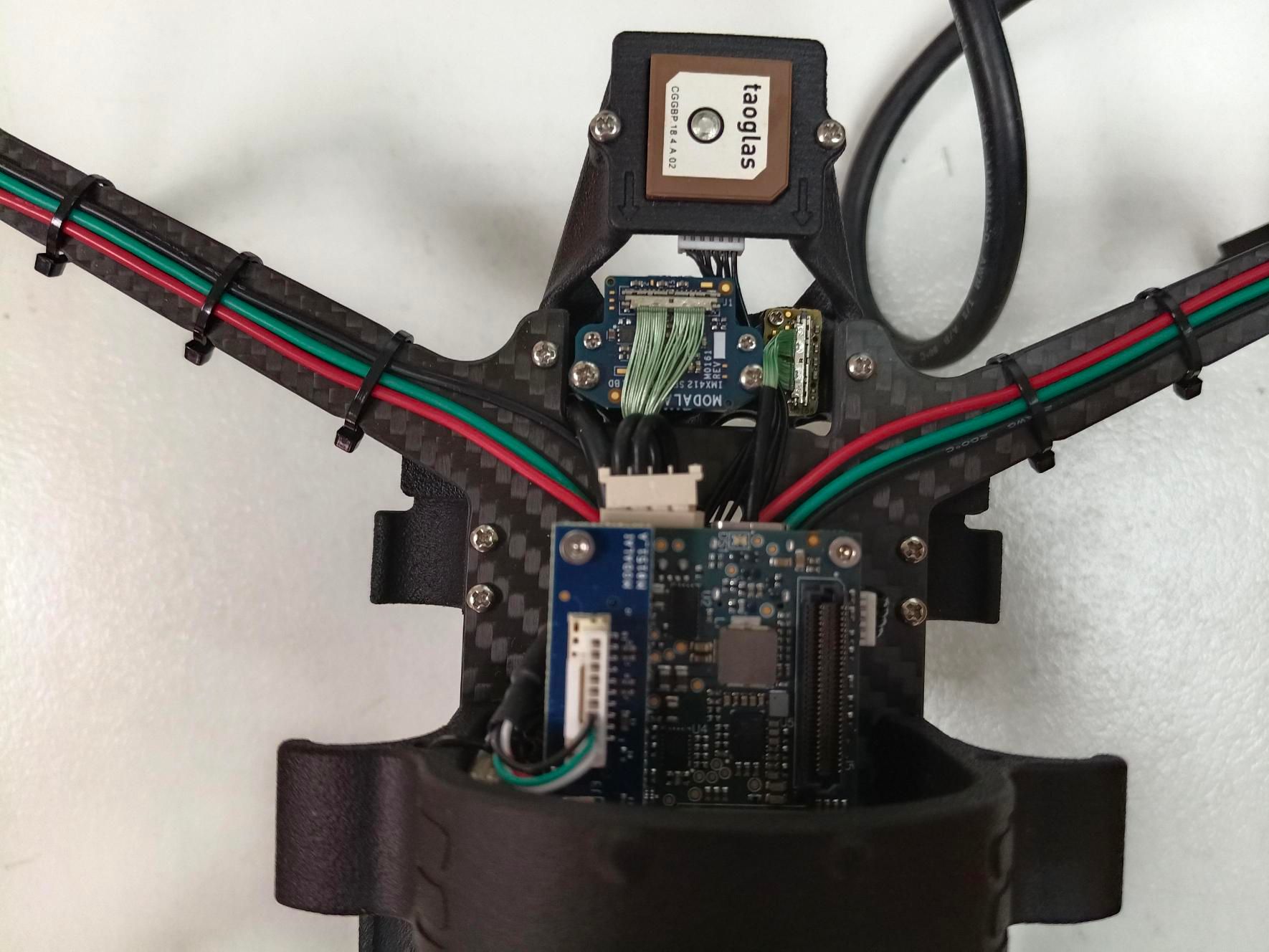
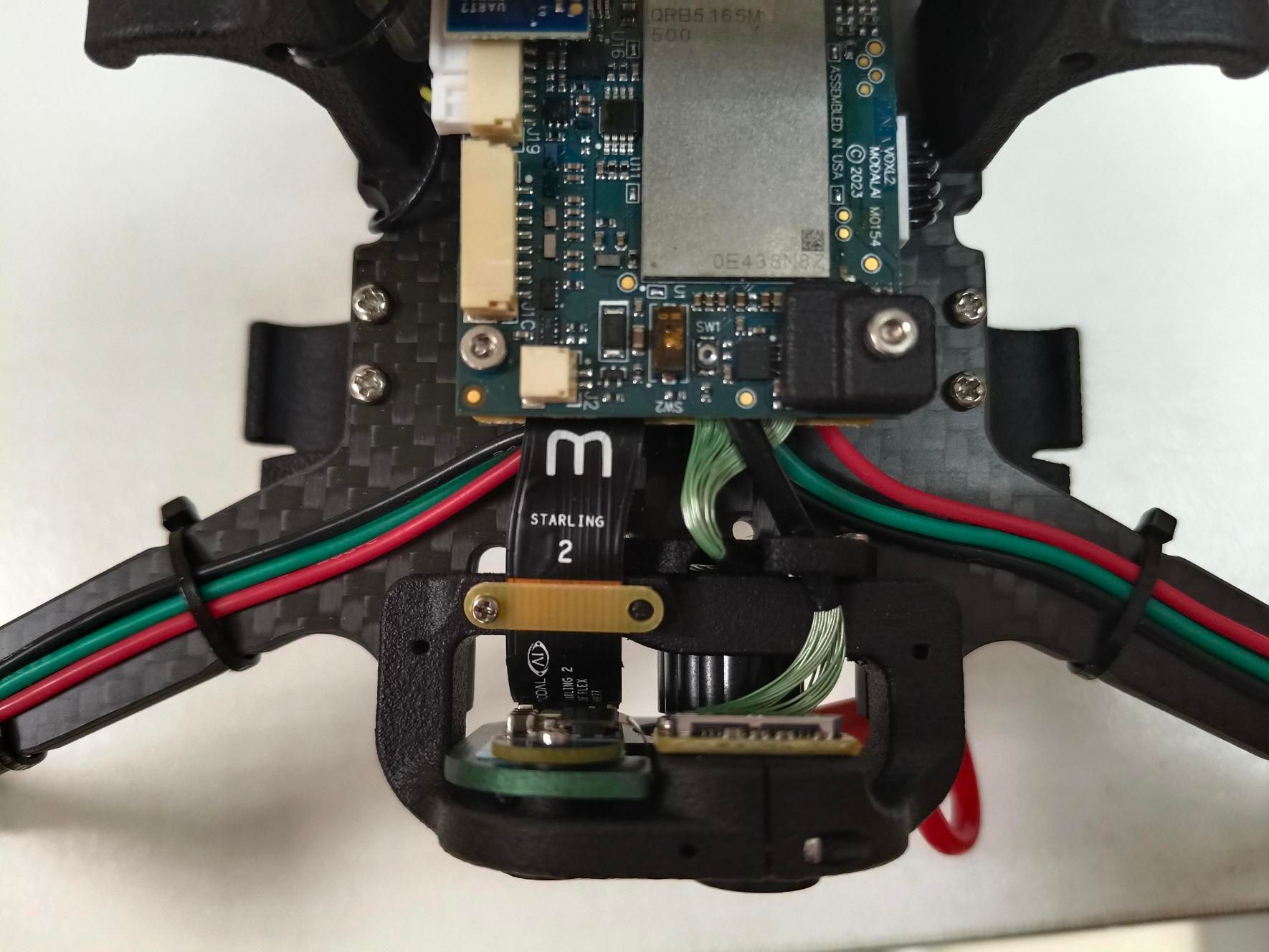
For the second point, I’ve attached several photos of the entire drone from multiple angles, including the TOF sensor and its cabling. Hopefully, this gives enough visual context to check for any physical issues.
As for the third question — I’ve tested the other image sensors, and they are all functioning normally. Only the TOF sensor appears to be non-functional.


-
To Modalai Team:
Regarding your first question — when I switch to the TOF Depth view in Portal, the screen is always completely black, and the depth values stay at 0. There is no visible image or noise.
For the second point, I’ve attached several photos of the entire drone from multiple angles, including the TOF sensor and its cabling. Hopefully, this gives enough visual context to check for any physical issues.
As for the third question — I’ve tested the other image sensors, and they are all functioning normally. Only the TOF sensor appears to be non-functional.
Hi @Jing-Yu,
It looks like your TOF sensor might be out of focus.
This is what normal output looks like:

You can change the focus by rotating the ring around the TOF sensor. You might want to use a set of pliers but be careful not to scratch the glass.
-
Hi @Jing-Yu,
It looks like your TOF sensor might be out of focus.
This is what normal output looks like:
You can change the focus by rotating the ring around the TOF sensor. You might want to use a set of pliers but be careful not to scratch the glass.
Hello ,@teddy-zaremba
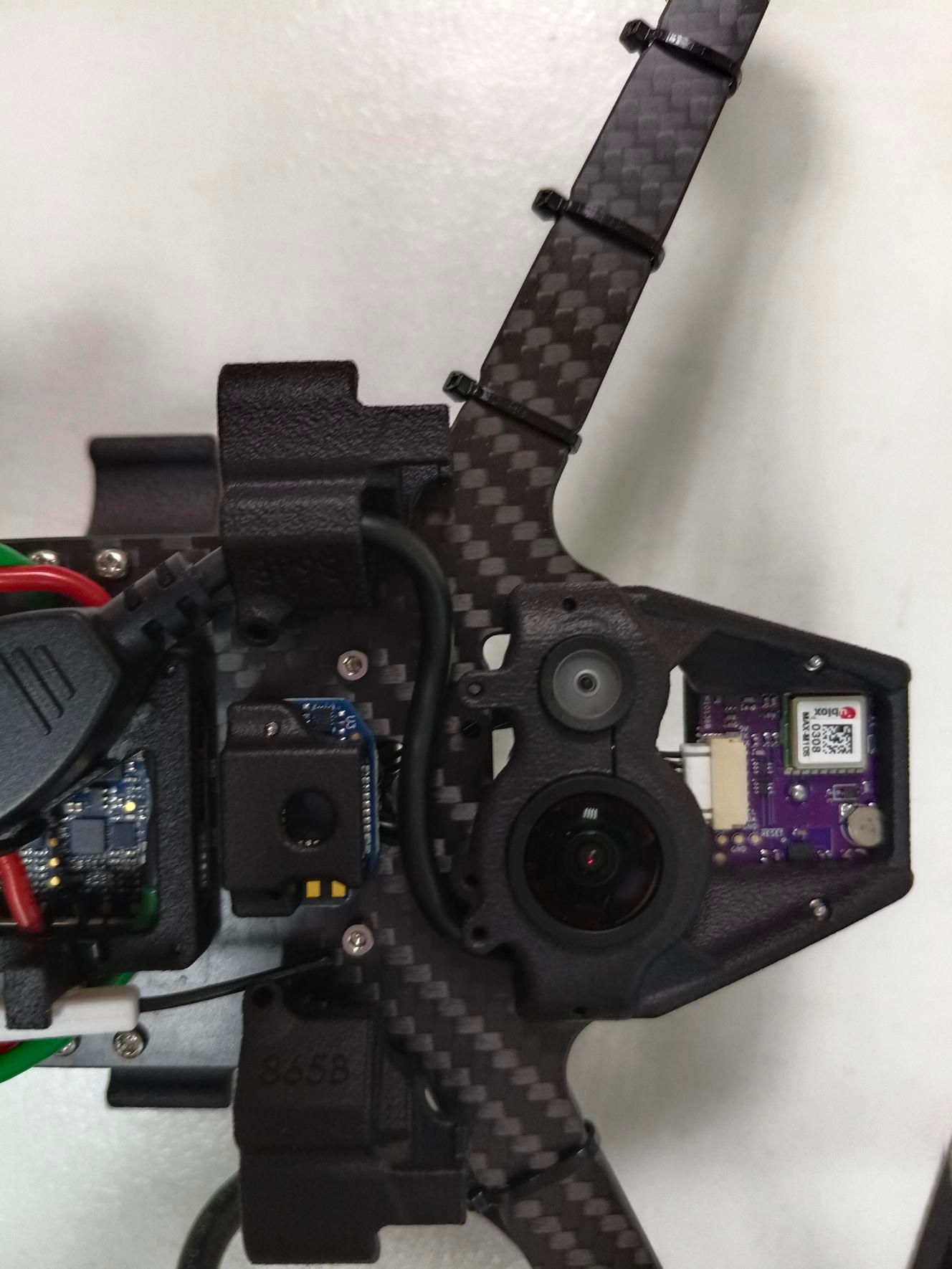
We tried rotating the ring around the TOF sensor as you suggested, but there was no noticeable change in the focus. Since we don’t have much experience adjusting hardware manually, we’re a bit worried about damaging the lens.Could you please confirm which exact part of the sensor we should be rotating? I’ve attached a photo of our TOF sensor here so you can point out the correct area to adjust.

-
Hello ,@teddy-zaremba
We tried rotating the ring around the TOF sensor as you suggested, but there was no noticeable change in the focus. Since we don’t have much experience adjusting hardware manually, we’re a bit worried about damaging the lens.Could you please confirm which exact part of the sensor we should be rotating? I’ve attached a photo of our TOF sensor here so you can point out the correct area to adjust.
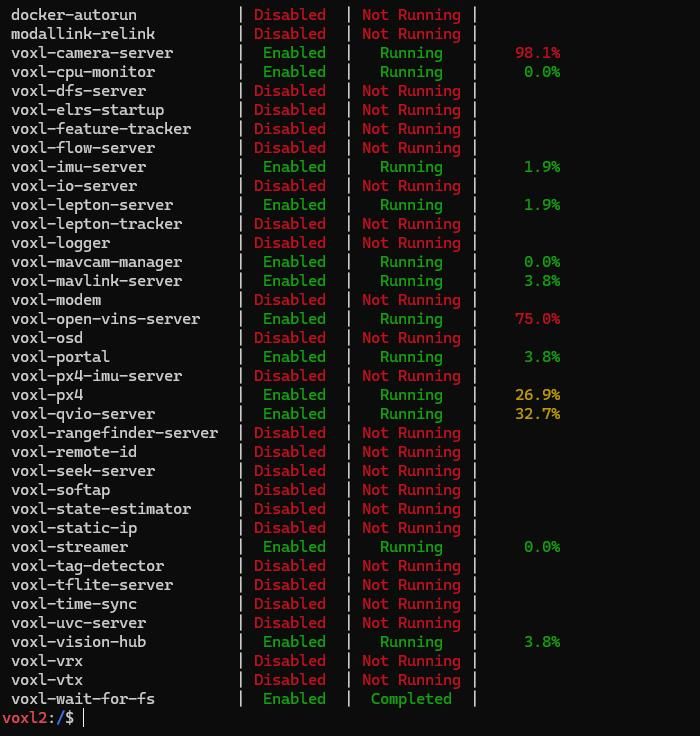
In addition, we have updated the SDK to the latest version (1.4.5).
We also tried closing the rangefinder server and enabling the lepton server, but still did not receive any response (please see the attached screenshot).
-
In addition, we have updated the SDK to the latest version (1.4.5).
We also tried closing the rangefinder server and enabling the lepton server, but still did not receive any response (please see the attached screenshot).
@Jing-Yu This is the tof camera - the ring around it rotates. I'd watch the output on voxl-portal for TOF-IR as you're rotating it to see if it has any impact.

-
R Rishi gnanasegar referenced this topic on
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login