Not receiving VIO pose information from VOXL in QGC
-
Hi!
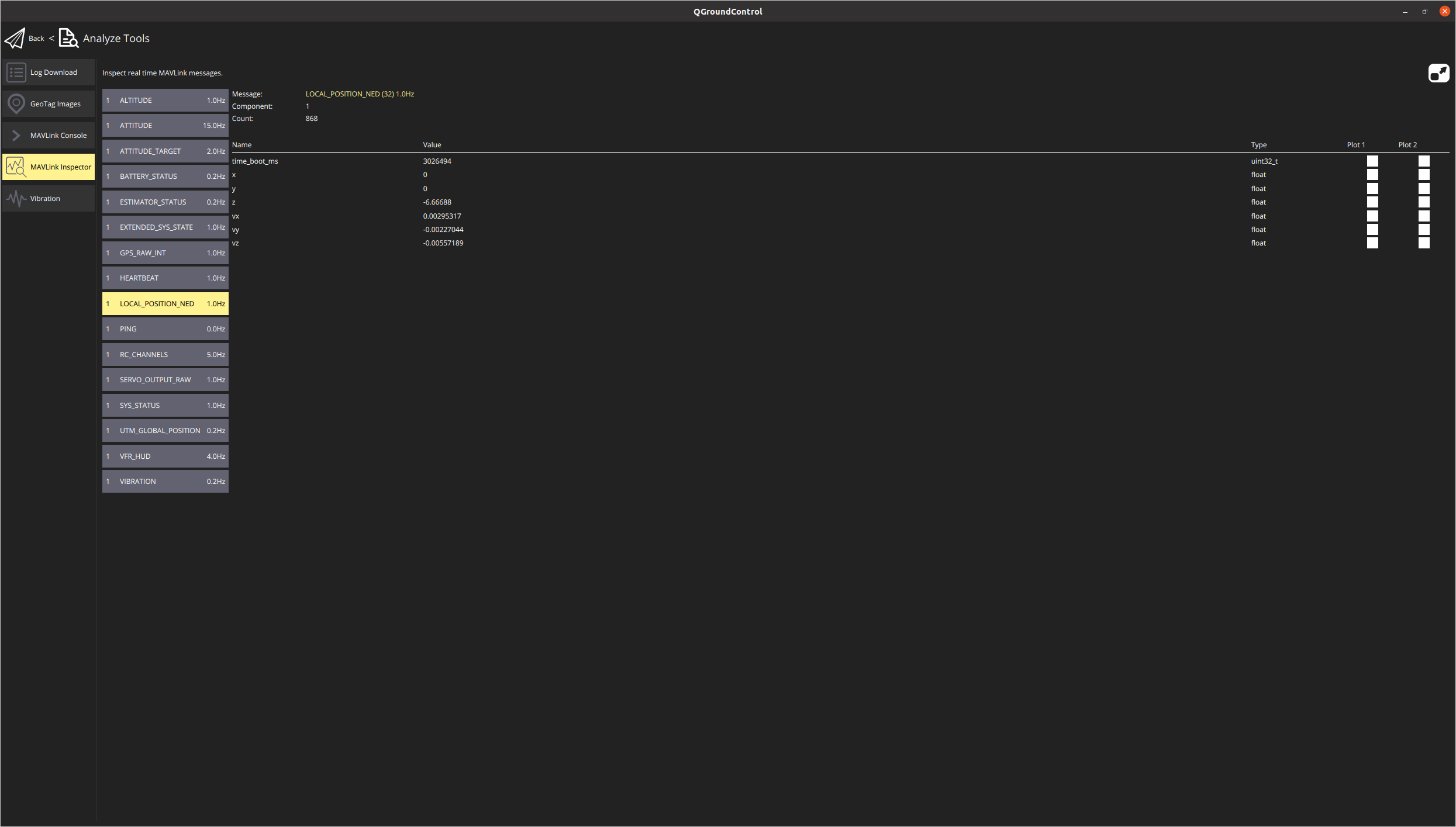
I have a m500 drone from modal AI. I have been following the 'getting started' guide provided here. I am able to connect to QGC from voxl and can see the red marker (in the QGC) rotate as I rotate the drone. However, I am not receiving any position information from the QGC. When I open the MAVLink inspector in QGC the planar coordinates (x, y) are always zero even when I translate the drone for a few meters.
The floor is textured so I do not think its due to the lack of features.
Here is my voxl-vision-px4.conf file:
{
"qgc_ip": "192.168.8.64",
"en_localhost_mavlink_udp": true,
"en_secondary_qgc": false,
"secondary_qgc_ip": "127.0.0.1",
"en_vio": true,
"en_voa": false,
"en_send_vio_to_qgc": true,
"en_send_voa_to_qgc": false,
"en_mvl_video_stream": false,
"en_adsb": false,
"adsb_uart_bus": 7,
"adsb_uart_baudrate": 57600,
"en_offboard_figure_eight": false,
"vio_to_ned_rotation_matrix": [[0, 1, 0], [1, 0, 0], [0, 0, -1]]
}
I have followed the tutorial very closely but haven't had any success with the VIO. Please let me know how can I debug this and get position estimates from VIO.
Thank you")
-
Have you set your EFK2_AID_MASK to vio mode(280)?
-
Yes it is set to 280.
-
Follow this link https://gitlab.com/voxl-public/flight-core-px4/px4-parameters and you can find our px4 parameters and helper parameters files for different features.
Under "Helpers" you'll find our "Indoor_VIO_params". Try installing that helper file on top of your existing parameters. Reboot the drone and see if that helps.
-
Thanks for your help. I realized that I hadn't configured the cameras correctly. I ran the voxl-configure-cameras and set it up correctly. Now I am getting the position estimates in QGC.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login