How to do Perfect Mapping only using Stereocameras
-
ERROR in pipe_server_write_point_cloud, received NULL data pointer
this is also showcasing -
What should be the best Voxel size and Esdf Max distance as our drone radius is 0.25
-
Hey,
I want to make a 3D map using the voxl-mapper using stereocams only and getting VIO by tracking cam and imu .
i have VOXL2 flight deck
what parameters should i use to get the perfect Map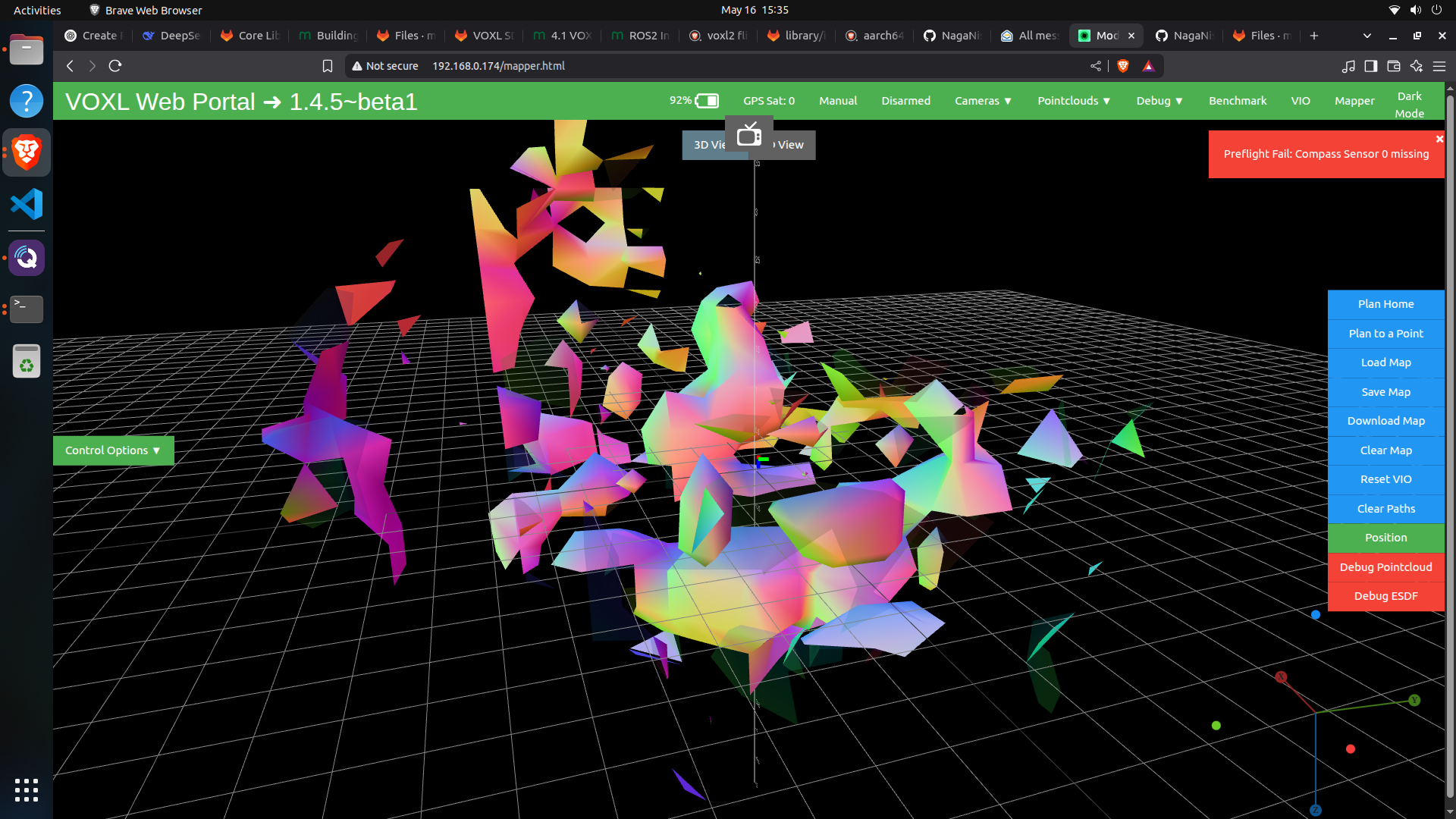
go through my photo -
@tom can anyone help me with this
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login