voxl-open-vins-server imu_to_cam RPY(deg) different output logs
-
I am currently working with the VOXL 2 and attempting to run the voxl-open-vins-server alongside the voxl-feature-tracker. To configure the system, I set custom RPY (Roll, Pitch, Yaw) values for the drone in the extrinsics.conf file. However, when I attempt to log the values, the output does not match the expected results, and localization is not functioning properly.
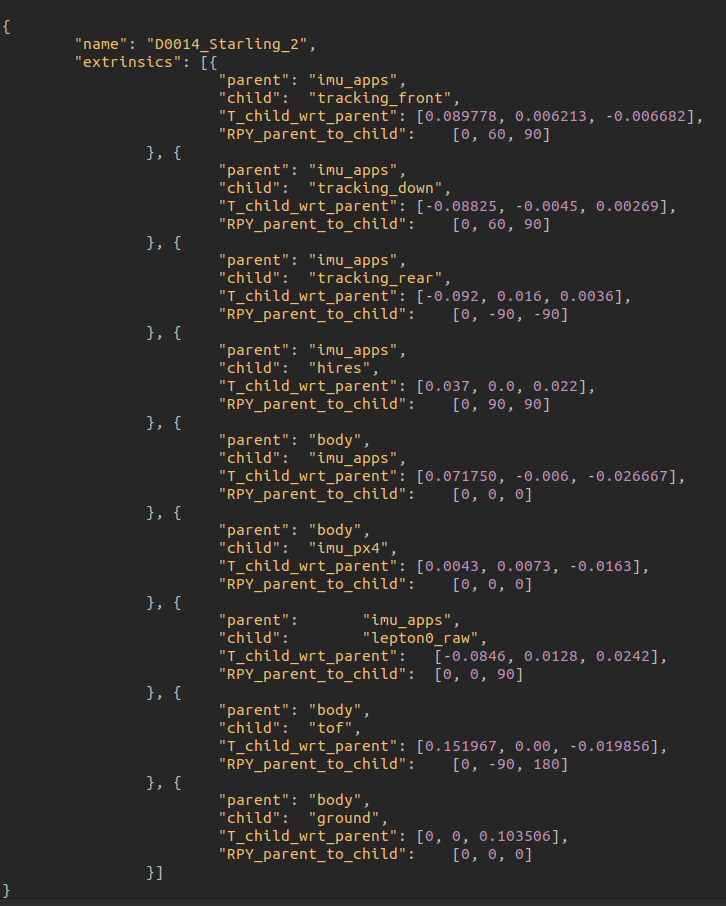
Here is the extrinsics.conf file with the custom settings I applied:
Here is the log output,

-
Unsure, if you have resolved this so I am going to attempt to help but I am going to need more information if possible. I am unsure how the setup is for the drone seems like you have one camera (Tracking_rear) pointed straight backwards and two cameras (Tracking_front, Tracking_down) facing forward at a 30 degree downward angle?
I am not sure that you are showing with the log output.
Have you tried hand testing using the commandvoxl-inspect-pose -land seeing how RPY and translational movement (moving the drone up, right, forward) are behaving for the local frame?