voxl-open-vins-server imu_to_cam RPY(deg) different output logs
-
I am currently working with the VOXL 2 and attempting to run the voxl-open-vins-server alongside the voxl-feature-tracker. To configure the system, I set custom RPY (Roll, Pitch, Yaw) values for the drone in the extrinsics.conf file. However, when I attempt to log the values, the output does not match the expected results, and localization is not functioning properly.
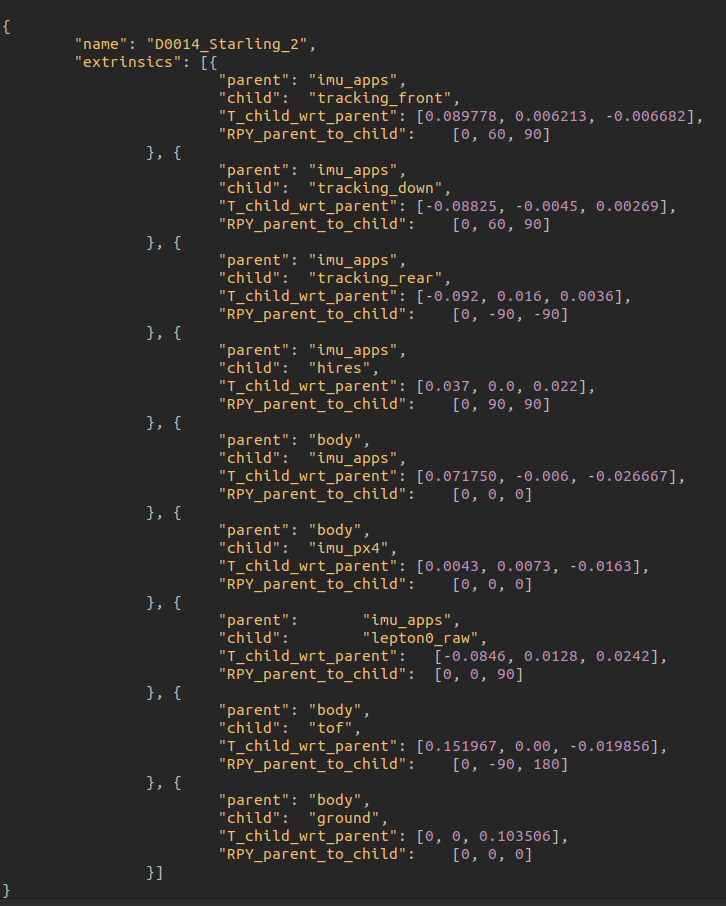
Here is the extrinsics.conf file with the custom settings I applied:
Here is the log output,

-
Unsure, if you have resolved this so I am going to attempt to help but I am going to need more information if possible. I am unsure how the setup is for the drone seems like you have one camera (Tracking_rear) pointed straight backwards and two cameras (Tracking_front, Tracking_down) facing forward at a 30 degree downward angle?
I am not sure that you are showing with the log output.
Have you tried hand testing using the commandvoxl-inspect-pose -land seeing how RPY and translational movement (moving the drone up, right, forward) are behaving for the local frame?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login