Starling 2 MAX with position flight mode with VOXL
-
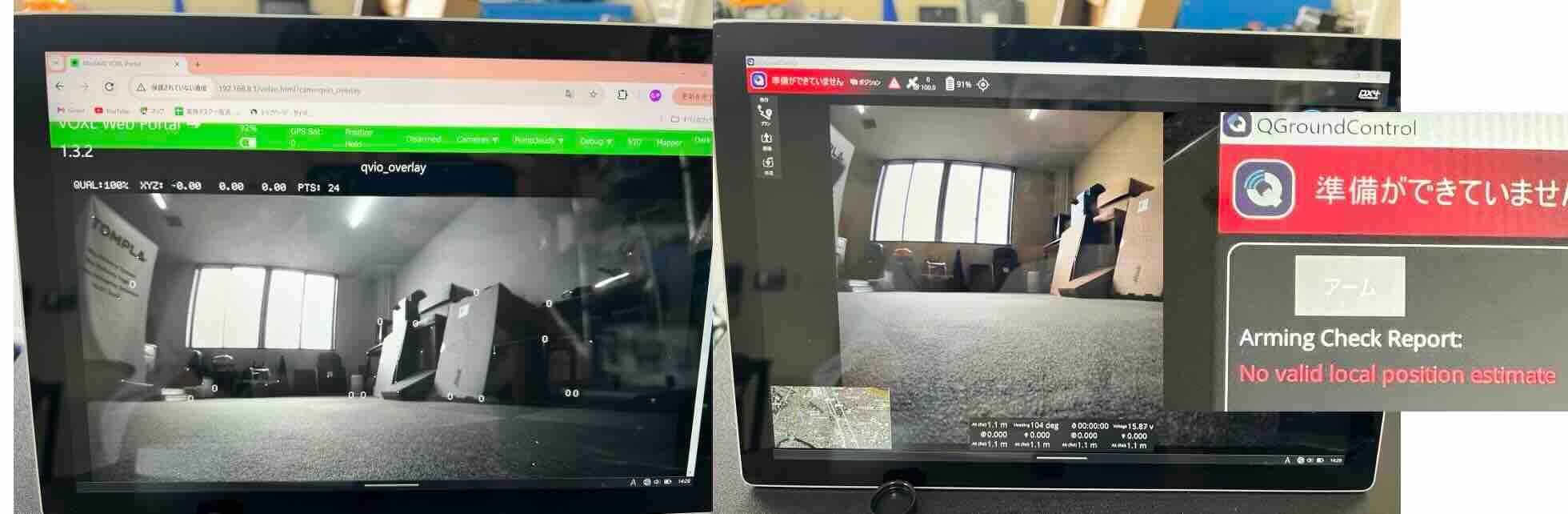
When I try to fly Starling 2 MAX with position mode with VOXL.
,It is not possible to fly with error [No valid local position estimate].I checked VIO status with VOXL portal.
It's QUAL=100% Ithink it's no problem.I have no idea to fix it and need advieses.
-
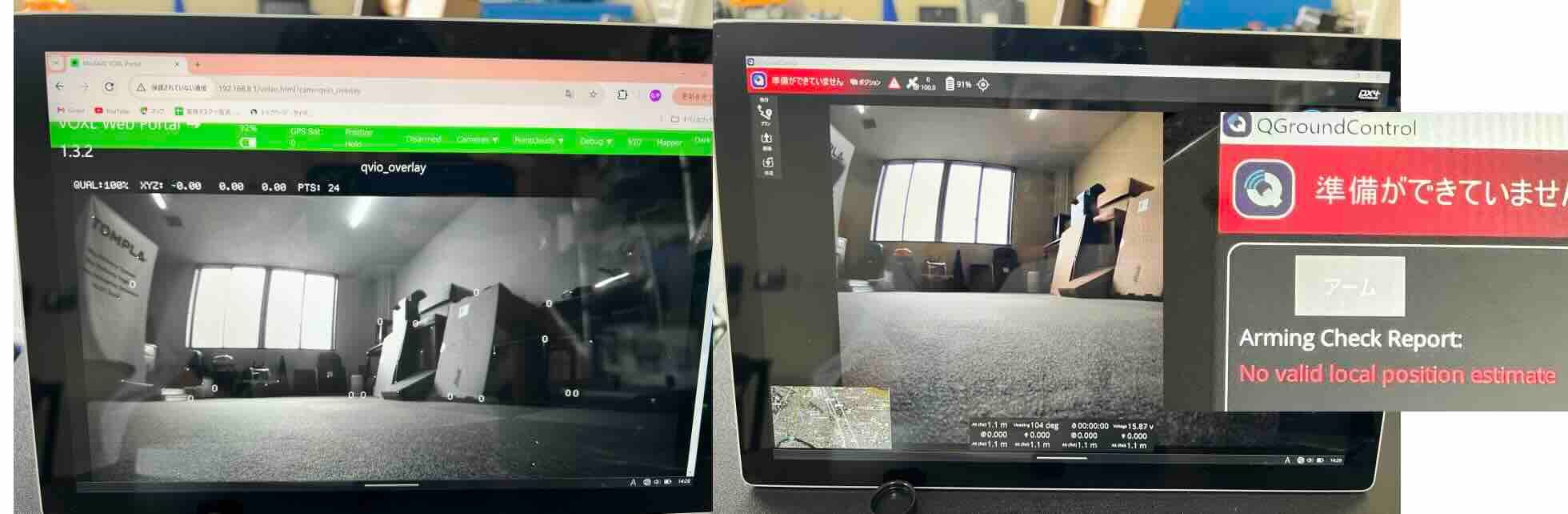
When I try to fly Starling 2 MAX with position mode with VOXL.
,It is not possible to fly with error [No valid local position estimate].I checked VIO status with VOXL portal.
It's QUAL=100% Ithink it's no problem.I have no idea to fix it and need advieses.
Starling 2 Max comes out of the box with PX4's EKF2 configured for GPS outdoor flight.
To fly indoors with VIO only you need to modify PX4's EKF2 parameters in QGC or with the voxl-configure-px4-params utility. In the EKF2_helpers menu, select "indoor_vio.params"
voxl2:/$ voxl-configure-px4-params -w [INFO] Voxl-px4 service found and active. Select an option: [1] Quit [2] Reset ALL PX4 params to default [3] experimental_do_not_use [4] EKF2_helpers [5] battery_helpers [6] ci_helpers [7] voxl2_io_helpers [8] other_helpers [9] platforms [10] radio_helpers [11] voa_helpers [12] calibration files 4 Select a EKF2 helper: [1] Quit [2] Back [3] outdoor_flow.params [4] outdoor_gps.params [5] outdoor_gps_baro.params [6] vio_gps_baro.params [7] indoor_vio.params [8] indoor_vio_missing_gps.params 7 [INFO] Loading file: /usr/share/modalai/px4_params/v1.14/EKF2_helpers/indoor_vio.params [INFO] Scanning currently loaded parameters... The following parameters about to be loaded differ from those currently loaded: NAME CURRENT NEW [1] EKF2_MAG_TYPE 0.0 5.0 [2] EKF2_EV_CTRL 0.0 15.0 [3] EKF2_HGT_REF 1.0 3.0 [4] EKF2_GPS_CTRL 7.0 0.0 [5] EKF2_EV_QMIN 0.0 1.0 Would you like to continue with the parameter differences listed above? (y/n) y [INFO] Setting params... [INFO] PX4 parameter configuration successful! Select an option: [1] Quit [2] Reset ALL PX4 params to default [3] experimental_do_not_use [4] EKF2_helpers [5] battery_helpers [6] ci_helpers [7] voxl2_io_helpers [8] other_helpers [9] platforms [10] radio_helpers [11] voa_helpers [12] calibration files 1 voxl2:/$Then reboot the Starling and PX4 should be configured to use the VIO data.
-
Starling 2 Max comes out of the box with PX4's EKF2 configured for GPS outdoor flight.
To fly indoors with VIO only you need to modify PX4's EKF2 parameters in QGC or with the voxl-configure-px4-params utility. In the EKF2_helpers menu, select "indoor_vio.params"
voxl2:/$ voxl-configure-px4-params -w [INFO] Voxl-px4 service found and active. Select an option: [1] Quit [2] Reset ALL PX4 params to default [3] experimental_do_not_use [4] EKF2_helpers [5] battery_helpers [6] ci_helpers [7] voxl2_io_helpers [8] other_helpers [9] platforms [10] radio_helpers [11] voa_helpers [12] calibration files 4 Select a EKF2 helper: [1] Quit [2] Back [3] outdoor_flow.params [4] outdoor_gps.params [5] outdoor_gps_baro.params [6] vio_gps_baro.params [7] indoor_vio.params [8] indoor_vio_missing_gps.params 7 [INFO] Loading file: /usr/share/modalai/px4_params/v1.14/EKF2_helpers/indoor_vio.params [INFO] Scanning currently loaded parameters... The following parameters about to be loaded differ from those currently loaded: NAME CURRENT NEW [1] EKF2_MAG_TYPE 0.0 5.0 [2] EKF2_EV_CTRL 0.0 15.0 [3] EKF2_HGT_REF 1.0 3.0 [4] EKF2_GPS_CTRL 7.0 0.0 [5] EKF2_EV_QMIN 0.0 1.0 Would you like to continue with the parameter differences listed above? (y/n) y [INFO] Setting params... [INFO] PX4 parameter configuration successful! Select an option: [1] Quit [2] Reset ALL PX4 params to default [3] experimental_do_not_use [4] EKF2_helpers [5] battery_helpers [6] ci_helpers [7] voxl2_io_helpers [8] other_helpers [9] platforms [10] radio_helpers [11] voa_helpers [12] calibration files 1 voxl2:/$Then reboot the Starling and PX4 should be configured to use the VIO data.
@James-Strawson said in Starling 2 MAX with position flight mode with VOXL:
NAME CURRENT NEW
[1] EKF2_MAG_TYPE 0.0 5.0
[2] EKF2_EV_CTRL 0.0 15.0
[3] EKF2_HGT_REF 1.0 3.0
[4] EKF2_GPS_CTRL 7.0 0.0
[5] EKF2_EV_QMIN 0.0 1.0I check the param that you recommend , but It is not fixed.
Starling 2MAX is already set same param.Should I check another point?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login