IMU is extremely noisy
-
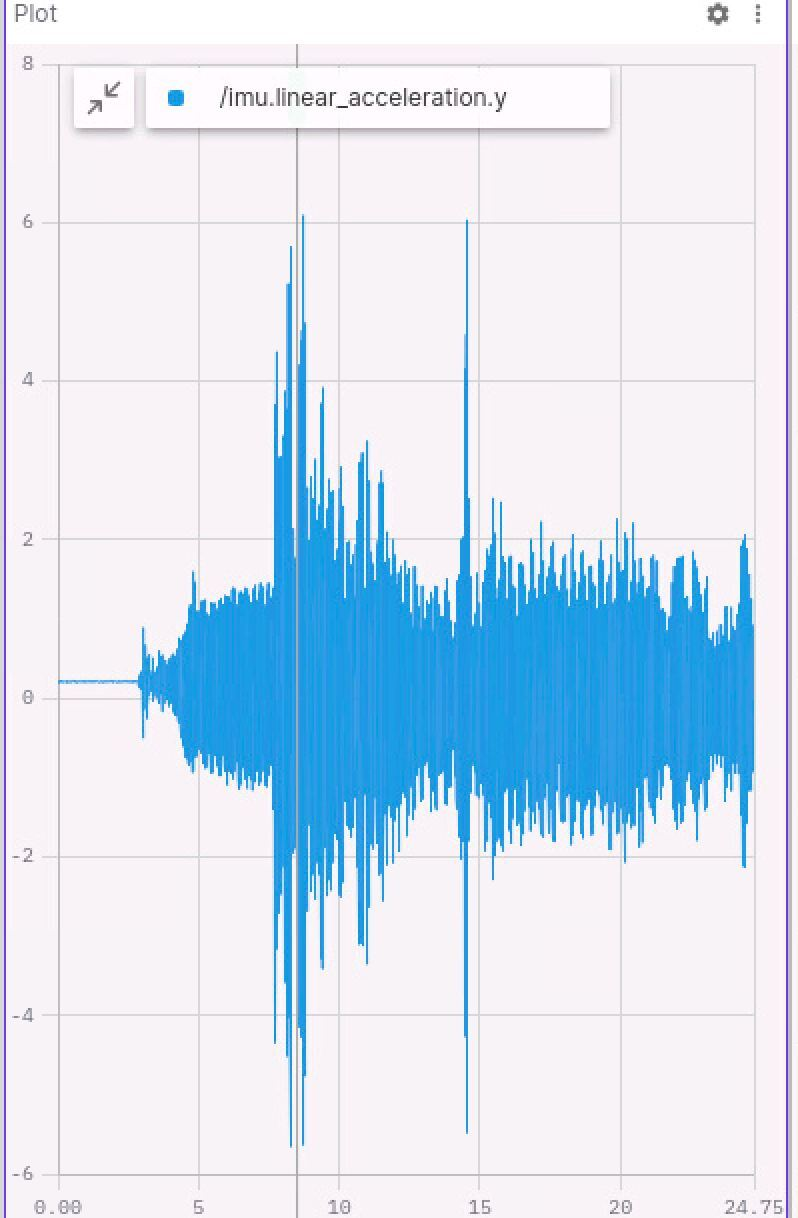
We've recently purchased starling 2 drone and are having issues executing even simple flights (takeoff with RC and flying in position mode), we've triaged those issues to the imu. Once VIO gets enough features the drone becomes more stable but generally taking off in position mode often fails. We've recorded imu data via voxl-logger (200hz, --skip 4) and the chart looks extremely noisy
We've also tried recalibrating IMU (voxl-calibrate-imu-temp and voxl-calibrate-imu). Could it be that the IMU sensor is damaged? What next steps would you recommend? -
@Sasha-Bagan , what are the units on the vertical axis, is it m/s/s or G ?
-
@Alex-Kushleyev m/s/s
-
@Sasha-Bagan , actually the noise not too bad, on average under 2m/s/s which is 0.2G, which is considered low.
Are you able to create a video of QVIO overlay which can be viewed through voxl-portal? As well as post a px4 log. It is better not to fly in VIO control mode until this is resolved (fly in manual thrust/roll/pitch/yaw mode and collect the log + video).