Unknown px4 firmware after SDK upgrade
-
Hi,
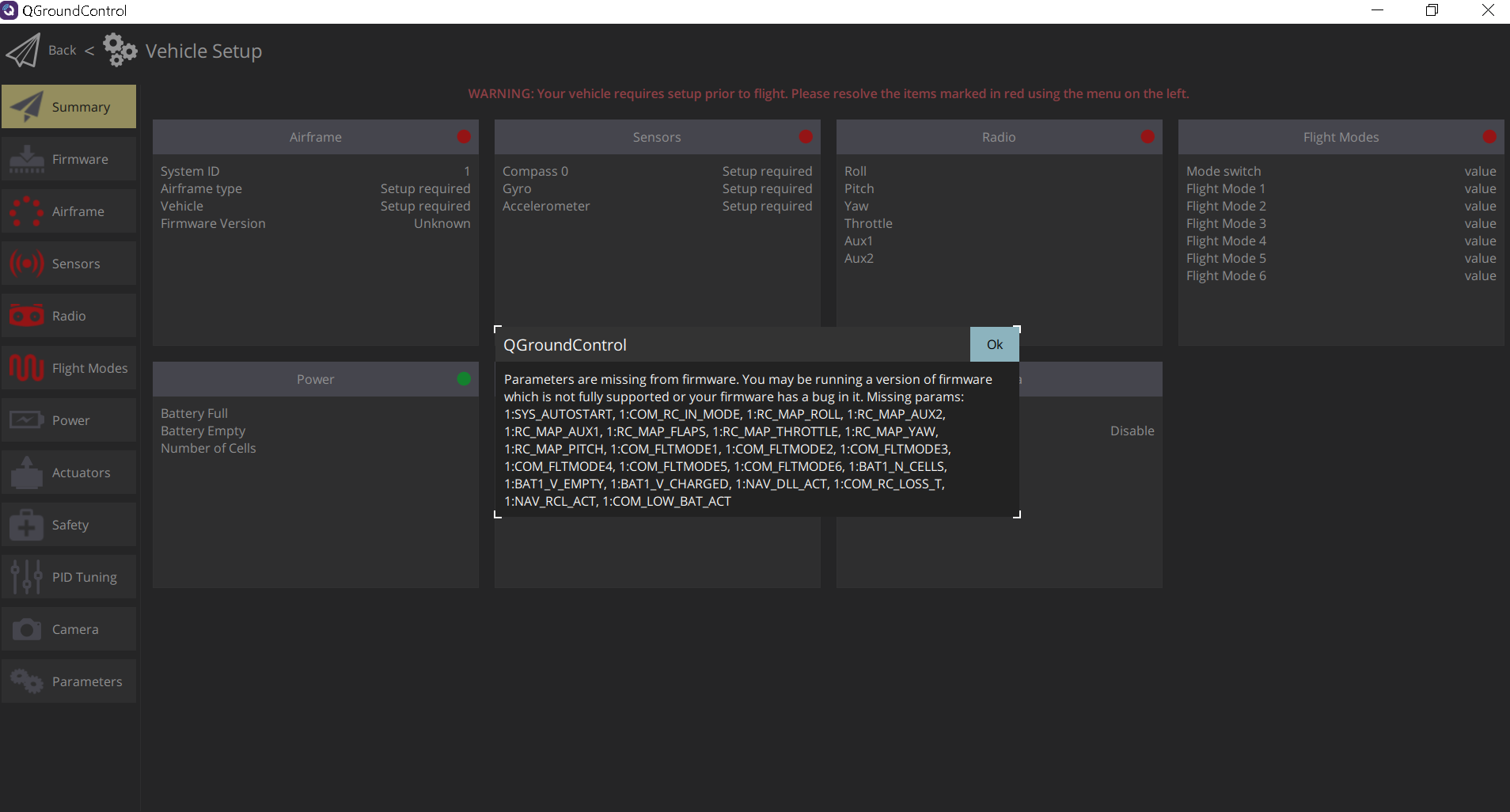
After I flashed VOXL SDK 1.1.2 on RB5, the firmware version is unknown in QGC.
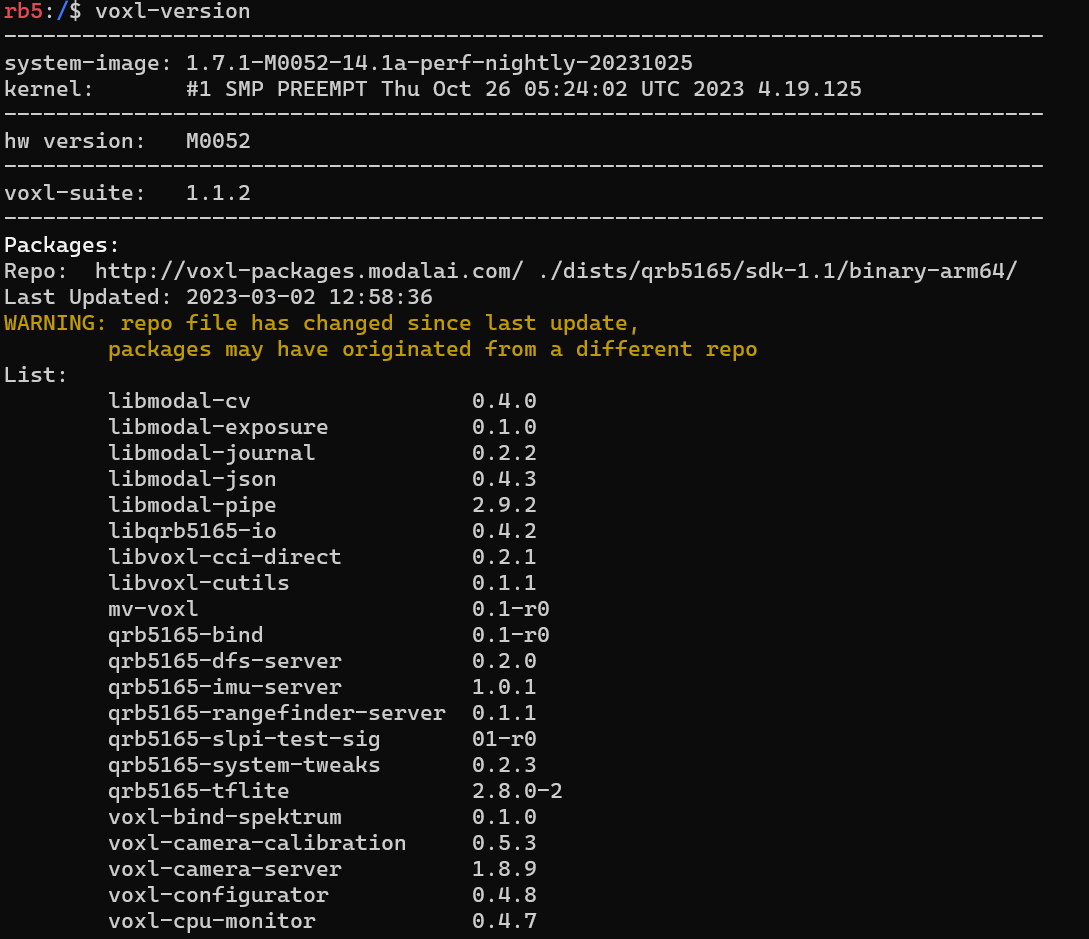
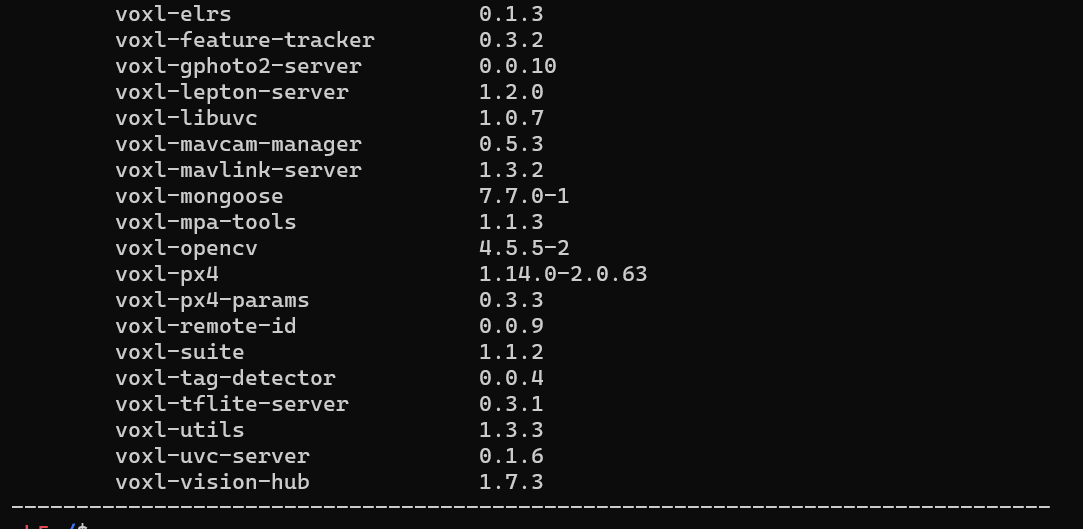
This is voxl-version:
What should I do?
Also, I lost the calibration files of gyroscope, accelerometer, gps, etc. Can you send me them?
-
To flash VOXL SDK 1.12, I used an ubuntu 22.04 laptop and did run the install.sh script.
After that I had the error above in QGC.
Is there any more steps necessary to upgrade the SDK and PX4 firmware?
-
The files missing are:
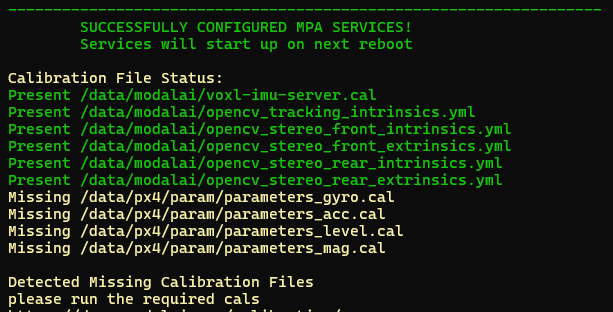
-
@vjuliani Can you rerun those calibrations?
-
@vjuliani QGC may complain about our version of PX4 but that is okay. We have a forked version of PX4 and the parameter sets don't necessarily align perfectly with what QGC wants to see.
-
Hi, @Eric-Katzfey
Thanks for your reply!
I runned voxl-configure-mpa again and the problem was fixed.
Also, I did all the sensors calibration and it worked.
However, even after upgrading VOXL SDK from 0.9.5 to 1.1.2, I am still having the same issue when trying outdoor flight.
The issue is similar to the https://forum.modalai.com/topic/3410/outdoor-navigation-problem one.
When I try an outdoor flight in position mode using EKF2_GPS_CHECK to 245, QGC shows a lot of GPS Speed Accuracy too low failure messages. With that, the drone status remains in Not Ready and it can't fly.
If I try to set EKF2_GPS_CHECK to 1, I get Pre-flight check failure: GPS Position Required messages from QGC. So, the status remains in Not Ready and the drone can't fly.
The only manner I found the drone flight to work was to set COM_ARM_WO_GPS to 1 and use altitude or manual flight mode.
I think it might be a gps hardware issue, like the one in the topic linked above.
The GPS model I had is M8N and I already had this issue with VOXL SDK 0.9.5.
Any suggestions?
-
I created a new topic about the GPS problem https://forum.modalai.com/topic/3612/outdoor-navigation-gps-problem