Troubleshooting/Improving VIO Accuracy

-
@nickyblanch What PX4 version is on each of the drones? Are they different?
@tom Thanks for your reply. I believe the PX4 versions are listed below:
VIO Challenged Drone #1
VIO Challenged Drone #2
VIO Successful Drone
It appears that the newer drone is on a different PX4 version than the two that are struggling - I thought that reflashing a new system image to the older two drones would have updated PX4 but I was obviously wrong. I can upgrade the PX4 firmware on the older two drones and see if that affects flight.
-
There are troubleshooting vio tips here: https://docs.modalai.com/flying-with-vio-0_9/#troubleshooting-vio
@Moderator Thank you for the tip. The vibration in particular could be a concern, I'll log some data and see.
-
@nickyblanch What PX4 version is on each of the drones? Are they different?
@tom Hi Tom, in case you have any other suggestions, here is some more info on what is happening:
Sensors are calibrated.
VIO works like a charm up until takeoff in position mode; while on the ground or with the props not spinning, VIO quality is good and rarely fails even with quick movements. VIO immediately fails within the first second or two of drone takeoff.
There is data in both /data/modalai/opencv_tracking_intrinsics.yml and /data/modalai/voxl-imu-server.cal.
Extrinsics are configured for the FC1 seeker (VOXL cam).
The vibration analyzer in QGroundControl didn't show anything that appeared abnormal during flight, although I haven't totally ruled out vibration yet.
Altitude mode is also extremely unstable, with jumps of several feet in each direction.
I've had this drone working well with VIO in the past, running the same PX4 version. I guess it could also be a hardware fault but that is more difficult to diagnose.
Thanks!
-
@nickyblanch What PX4 version is on each of the drones? Are they different?
@tom It's been a bit since the last update, but I after lots of fresh installs, calibrations, etc, I think the issue may be narrowed down to vibration. Shown below is the output of voxl-inspect-vibration for IMU0 during a relatively stable flight. The results are the same for IMU1.
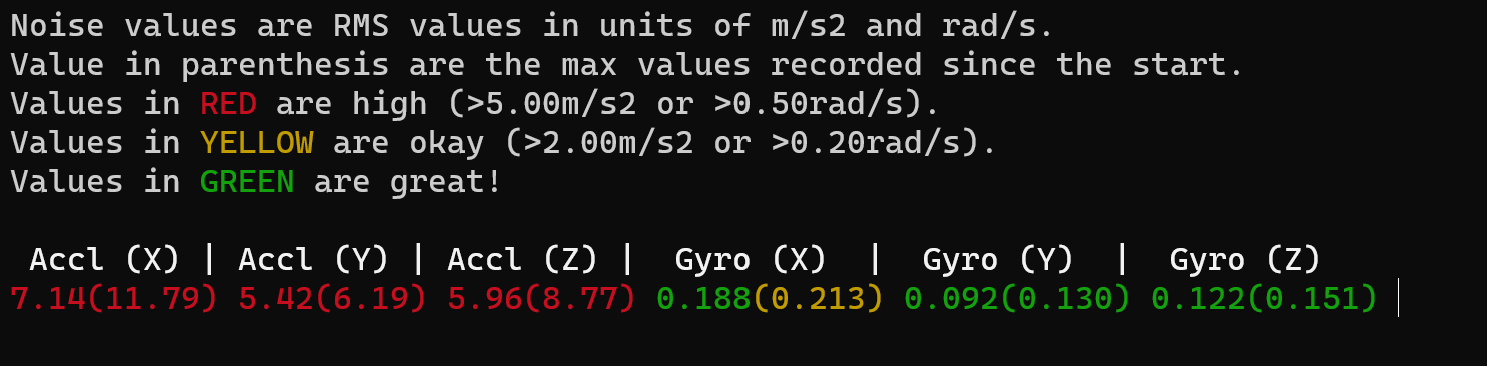
It's clear that the vibration on the IMU is high, but is there anything I can do about it? The frame of the Seeker is unmodified, exactly as it came. Also, do you know if this vibration is high enough to cause occasional VIO failures?
Thanks,
Nick -
@tom It's been a bit since the last update, but I after lots of fresh installs, calibrations, etc, I think the issue may be narrowed down to vibration. Shown below is the output of voxl-inspect-vibration for IMU0 during a relatively stable flight. The results are the same for IMU1.
It's clear that the vibration on the IMU is high, but is there anything I can do about it? The frame of the Seeker is unmodified, exactly as it came. Also, do you know if this vibration is high enough to cause occasional VIO failures?
Thanks,
Nick@nickyblanch that vibration does look high. We typically have much better on Seeker. Is the VOXL CAM portion loose or anything?
-
@nickyblanch that vibration does look high. We typically have much better on Seeker. Is the VOXL CAM portion loose or anything?
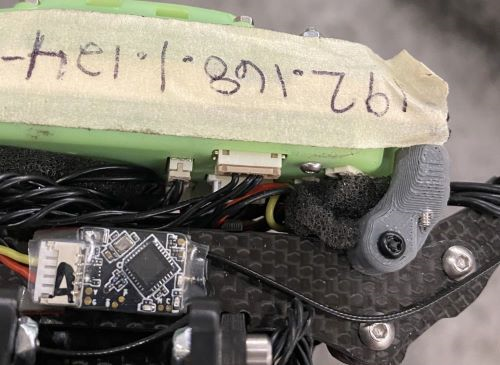
@Moderator Hi, thank you for your response. The VOXL cam is firmly attached to the frame, the four main mounting screws are tight and the rubber washers are under compression. I will go through and make sure everything else is tight, but it all appears to be. I swapped out the propellers for brand new ones yesterday.
I added foam padding between the VOXL CAM and the frame in an attempt to dampen vibration but it may have made it worse. VIO failed after about a minute of slow flying.

-
@nickyblanch that vibration does look high. We typically have much better on Seeker. Is the VOXL CAM portion loose or anything?
@Moderator Hi, just wanted to follow up - have you seen this problem before and/or how it was fixed? I tore the entire VOXL Cam portion apart, tightened everything, and re-secured the VOXL Cam to the airframe with a lot of thick foam between the VOXL and the airframe. Vibration still shows red (> 5.00m/s^2) after takeoff in Position Mode but is fine before takeoff. VIO flight technically works when moving slowly, but it is extremely unstable and the Seeker is constantly jerking up/down and left/right. Brand new propellers, motors appear to work fine. The drone has sustained a few crashes while indoors in the past.
I don't have the budget for a new VOXL cam and need to get the drone flying within the next week so I can finish my thesis and graduate - any suggestions? Is there possibly some software filtering in the VOXL sdk that I can check?
Thanks!
-
@Moderator Hi, just wanted to follow up - have you seen this problem before and/or how it was fixed? I tore the entire VOXL Cam portion apart, tightened everything, and re-secured the VOXL Cam to the airframe with a lot of thick foam between the VOXL and the airframe. Vibration still shows red (> 5.00m/s^2) after takeoff in Position Mode but is fine before takeoff. VIO flight technically works when moving slowly, but it is extremely unstable and the Seeker is constantly jerking up/down and left/right. Brand new propellers, motors appear to work fine. The drone has sustained a few crashes while indoors in the past.
I don't have the budget for a new VOXL cam and need to get the drone flying within the next week so I can finish my thesis and graduate - any suggestions? Is there possibly some software filtering in the VOXL sdk that I can check?
Thanks!
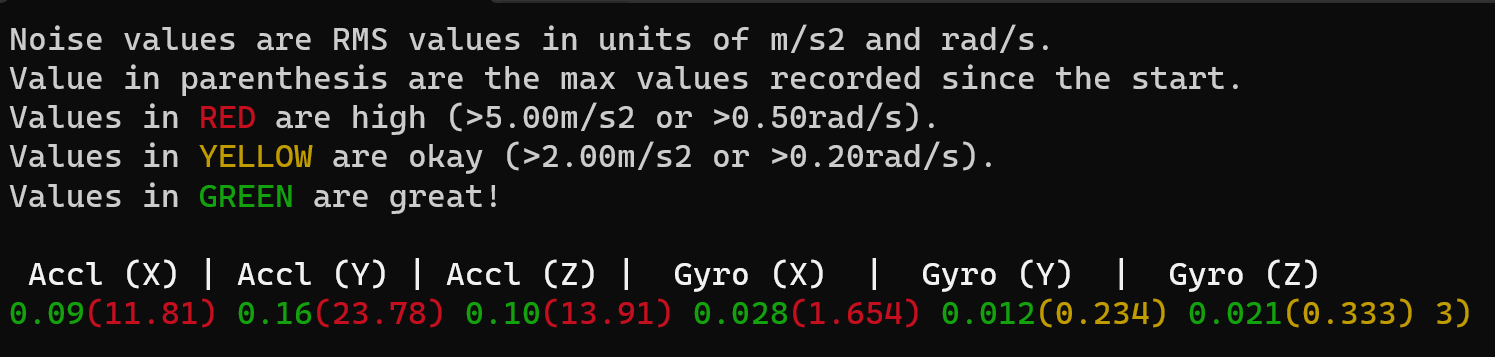
@nickyblanch I'll send an update here for anyone else with bad VIO quality that may be affected by vibration - tearing apart/reassembling the VOXL Cams may have helped a small amount, but the majority of the problem was definitely centered around the battery. The battery seemed fine and secure, but after adding foam all the way around the battery, the VIO quality improved significantly.
Curiously, although the vibration data is lower now, it still shows red ( > 5 m/s^2) in all three directions. I compared this against my brand new VOXL2 Seeker drone that doesn't have any VIO problems and that drone also shows red ( > 5 m/s^2) for vibration data. However, despite the high vibration, both the new VOXL2 drone and the older, previously unflyable VOXL1 drones fly semi-well in position mode.
-
@nickyblanch I'll send an update here for anyone else with bad VIO quality that may be affected by vibration - tearing apart/reassembling the VOXL Cams may have helped a small amount, but the majority of the problem was definitely centered around the battery. The battery seemed fine and secure, but after adding foam all the way around the battery, the VIO quality improved significantly.
Curiously, although the vibration data is lower now, it still shows red ( > 5 m/s^2) in all three directions. I compared this against my brand new VOXL2 Seeker drone that doesn't have any VIO problems and that drone also shows red ( > 5 m/s^2) for vibration data. However, despite the high vibration, both the new VOXL2 drone and the older, previously unflyable VOXL1 drones fly semi-well in position mode.
-
This post is deleted!
@AP123 Hi, I have not seen this before, but I also haven't tried enabling obstacle avoidance. I can't pretend to know much about the obstacle avoidance code running inn the VOXL SDK, but I suppose this error could be caused by some obstacle avoidance service not running on the VOXL when it should be, hence QGroundcontrol being confused.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login