Sentinel flips during takeoff
-
We just got the Sentinel test and have been doing some tests with it. We noticed a random behavior that when we takeoff using the takeoff mode from the px4 in QGroundControl, the drone flips sometimes. The weird thing is that it does it randomly. Sometimes it flies and sometimes it flips because one of the motor is not spinning fast enough.
We observed this behavior in two different drones.The images below shows the images of the plot of the actuator output sent to the drones motors after doing two different tests. The first one was successful(image on the right) and the following was the one the issue occurred(image on the left).
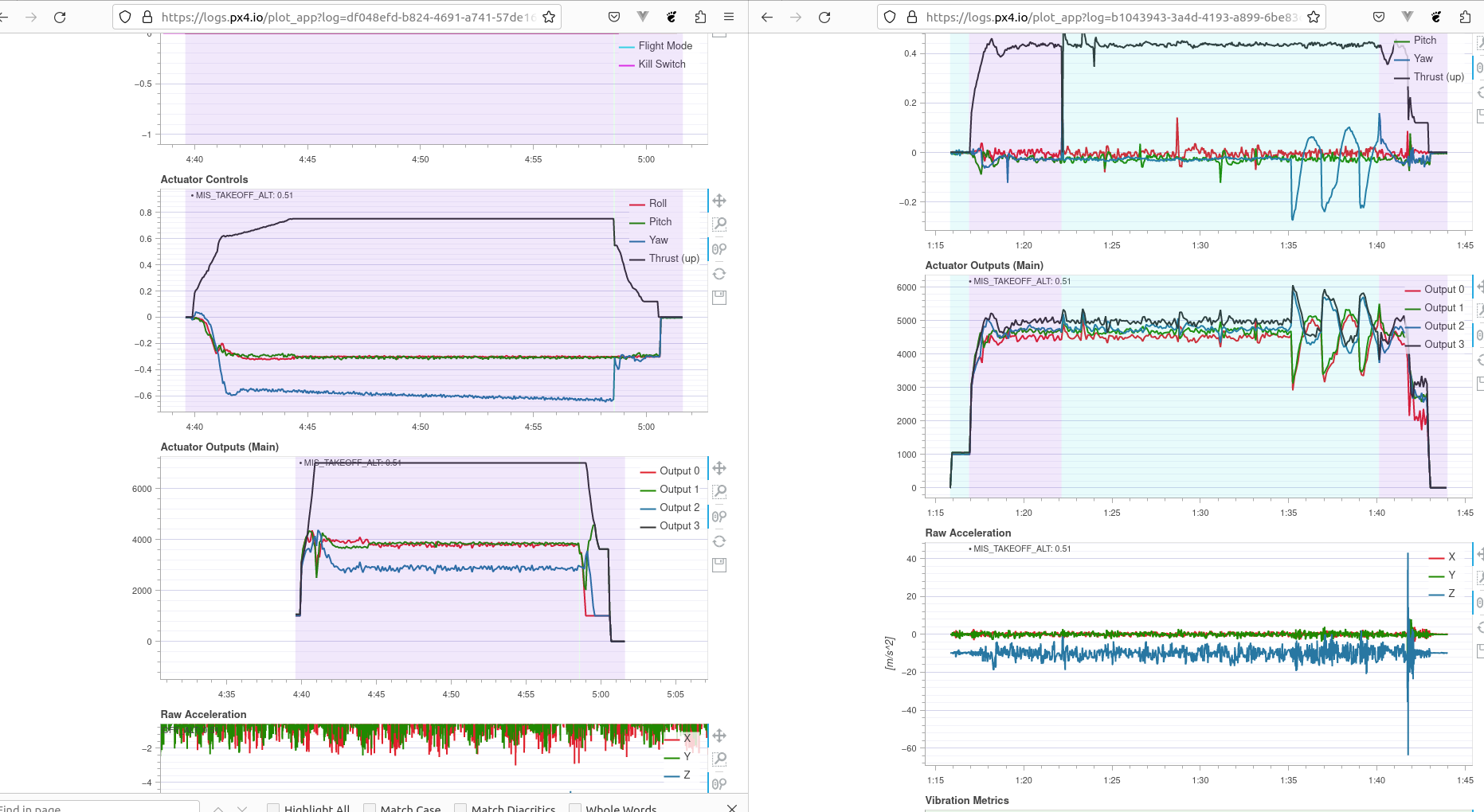
What is strange is that px4 sends strange revolucion value to the drone. Is there any cause of this?
The data collected from Qgroundcontrol is the one below.
https://drive.google.com/drive/folders/1tFS2fI25ayHK0pZ4bpmeG1JC0PZRACEX?usp=sharing -
@stevedan A couple of questions. First, are you power cycling the drone in between each of these flight attempts or just landing and then attempting the next flight without a power cycle? Is it always the same motor that appears to not be turning? If so, is it the same motor on the second drone?
-
@stevedan Also, with battery / power removed, can you slowly rotate each motor by hand and see if you can feel any sticky spots? Any unusual noise from the motor when it is being powered?
-
@stevedan Couple more questions. Are you setting the altitude for the mission to be 0.51m? That's pretty low. It could be trying to turn towards the first waypoint before it has even left the ground. Can you try at a higher altitude? What are you using for position control. Doesn't look like you are using GPS.
-
@stevedan And if you set the parameter UART_ESC_VLOG to 1 then we can see in the logs if the ESC is doing the right thing.
-
@Eric-Katzfey i am not power cycling th drone. I do the flight immediately. Also, when this happens, it happens in the same motors.
-
@Eric-Katzfey yes, it happens on a different motor on the second drone but when it happens on eahc drone, it happens in the same motors
-
@Eric-Katzfey i am flying indoor. Going high is a bit dangerous. I have done this multiple times on the rb5 without issue.
-
@Eric-Katzfey i will log it on Monday and send it.
-
@stevedan A video of a good flight and of a bad one would also be pretty helpful.
-
@Eric-Katzfey when I spin the motor slow, it does as shown in the video but spinning it a bit fast, it goes smoothly. No unusual noise when I turn the drone up. Videos are in the same link as before. https://drive.google.com/drive/folders/1tFS2fI25ayHK0pZ4bpmeG1JC0PZRACEX?usp=sharing
-
@Eric-Katzfey I have also added a video to the link and the log file with the name test_flight_UART_ESC_VLOG_fail for the failed flight test and test_flight_UART_ESC_VLOG_sucess for the successful flight test.
-
@stevedan Thanks! It's clear from the logs that PX4 is commanding the proper motor speed to the ESC but the ESC is reporting that the motor is spinning much slower than the desired speed until the drone starts to take off. At that point that motor is commanded to go to maximum rpm and then all of a sudden the motor does start spinning at the desired speed. We are discussing this internally and will come up with a recommendation for next steps.
-
@stevedan One quick thing you can try is to blow some compressed air through the motor. If there is some debris stuck inside the motor then the air could blow it out.
-
@Eric-Katzfey I have tried that and it seems not to work. As you said, this happens when during the arming, one of the propellers does not spin fast enough like the others. It happens randomly on both drones.
-
@stevedan Okay, thanks for trying that. We are still discussing internally on best next steps.
-
@Eric-Katzfey Just adding more information, this also happens sometimes in manual flight, but it take time for the motors to get to speed during arming.
-
@stevedan Okay, thanks! And thanks for your patience. We are locating a drone here in San Diego that exhibits the same behavior so we have a way to reproduce and resolve the issue. One option is to send some new motors but our lead ESC engineer believes he can resolve this with an update to the ESC firmware.
-
@Eric-Katzfey Thank you for the fast response. Let us know because there is a bit of urgency to use the drone and there wont be enough time to procure another due to lead time. We currently have 3 new drone and plan to procure more but this is hindering us from doing so.
-
@stevedan Okay, understood. We are testing some new ESC firmware now and hope to have an update for you early next week.