Difference in IMU characterization - 42688 p on voxl
-
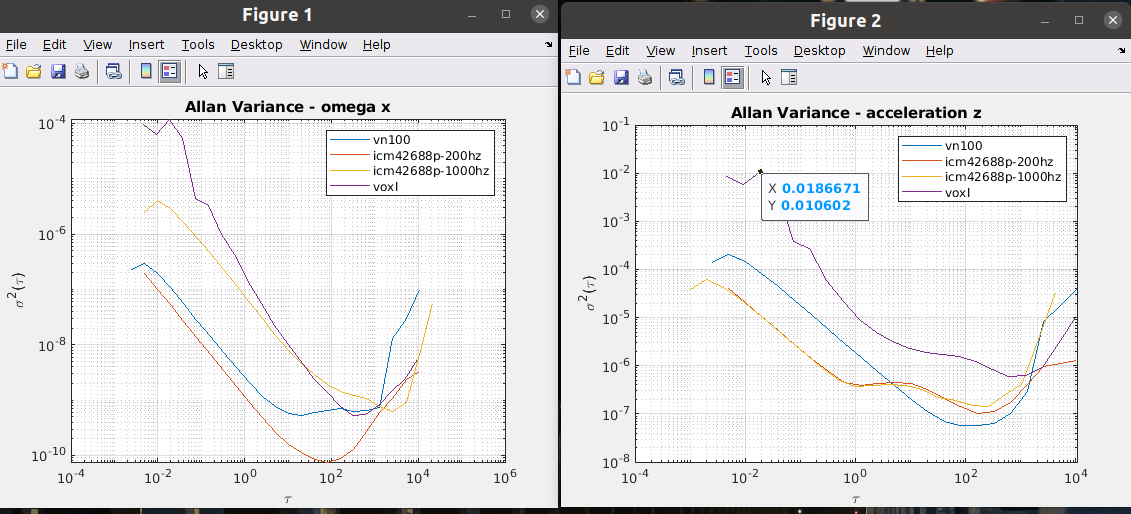
I was trying to understand the noise characteristics of the IMU - ICM 42688p on Modal AI M500 drone that has a VOXL board . I am trying to find the best IMU that I can use for my VIO application. I have another board with the same IMU - ICM42688p on it.
I collected stationary data for several hours on VOXL board and DK42688 board that I ordered and then plotted the allan deviation plot as shown in the figure. I am getting very different results for Allan deviation between VOXL and DK42688 board.
For comparison I also plotted Allan deviation of VN100 IMU (https://www.vectornav.com/products/detail/vn-100).Can someone explain why the VOXL-IMU0 has more noise? Are there any settings which need to be done so that I get a similar behavior from DK42688p board?
-
You should compare the settings as configured in the code here. We provide the code so you can fork and implement your own configuration if needed
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login