Docker MAVSDK cannot find camera
-
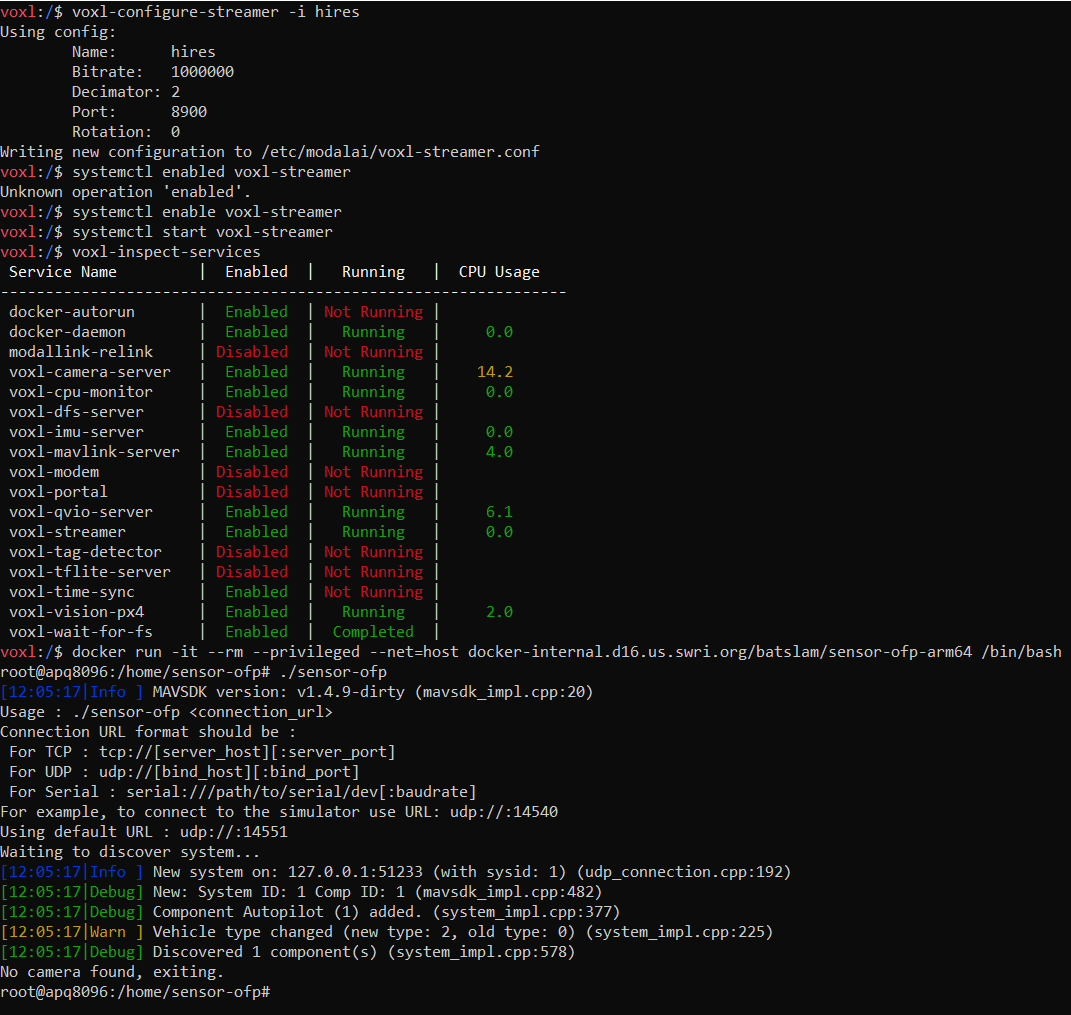
@Steve-Sager What is the output of
voxl-inspect-services?@tom Actually, I was able to fix the problem with the voxl-streamer not running by using voxl-configure-streamer -i hires.
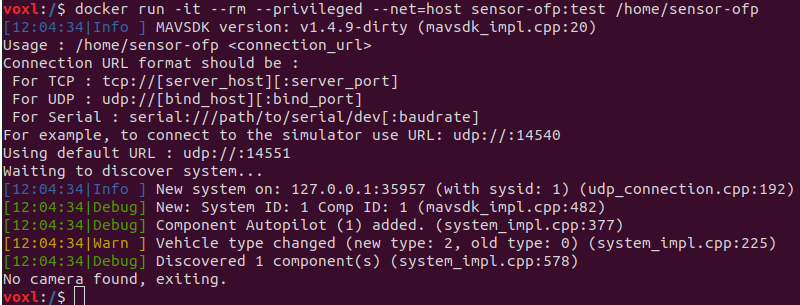
We are still not able to see the camera with our docker mavlink image though.
The following screen shot is what is happening...
-
@Steve-Sager Based on the output from
voxl-configure-streamer, it looks as though the video is on port8900while your app seems to be looking at port14551@tom the 14551 port is looking for our aircraft to run the docker, should we change that to the video port 8900?
-
@Steve-Sager I don't know anything about this app that you are running. Is the application itself trying to take in the video? If so, what port is it expecting the video to be on?
@tom okay so following the steps here https://docs.modalai.com/voxl-vision-px4-telemetry/ I should be able to connect to the aircraft over mavlink using a docker image that is requesting information from the mavlink server. We want to pull IMU telemetry data and hires image data to train an AI with, we are then going to use said AI to re-fly the obstacle course based on our first human pilot flight. Should we be using the port 14550 or 14551 for this?
-
@Steve-Sager If you're just looking to train the model you can use voxl-logger to save the hires images and then pull them off later (this would be done outside the docker)
@tom How exactly would I go about doing that with voxl-logger, step-by-step?
-
@Steve-Sager
voxl-loggerrequires that you have camera server running so that it can pull frames from/run/mpa/hires, then you'll follow the docs here: https://docs.modalai.com/voxl-logger/to use
voxl-logger --cam hiresto save frames to the/data/voxl-logger.You can then pull your frames off of VOXL from that directory for training purposes.
-
@Steve-Sager
voxl-loggerrequires that you have camera server running so that it can pull frames from/run/mpa/hires, then you'll follow the docs here: https://docs.modalai.com/voxl-logger/to use
voxl-logger --cam hiresto save frames to the/data/voxl-logger.You can then pull your frames off of VOXL from that directory for training purposes.
@tom thank you for responding to my question regarding how to setup voxl-logger, we followed your instructions and recorded some data.
I noticed that the capture rate of the sensors is extremely high (around 1000+ hertz) and the video capture rate is about 30 hertz. Is there any way that we can get these data collection rates to be more synchronized? Is there a way to limit the imu frequency to ~30 hertz?
right now we are using a command that looks something like....
voxl-logger --cam hires -i imu1
-

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login