VOXL-CAM is not connecting to QGC through UDP
-
@Matthew-Booker
Hi,
we have followed the tutorial 'https://docs.modalai.com/voxl-vision-px4-telemetry/' and in the you tube link attached 'https://youtu.be/gaV4ubIYFzs' we noticed the message 'Added new UDP connection to IP'.
when we executed the command 'voxl-vision-px4 --debug_udp_recv' we didn't get the above message.voxl:~$ voxl-vision-px4 --debug_udp_recv Enabling UDP recv debugging loading our own config file ================================================================= Parameters as loaded from config file: qgc_ip: 192.168.1.27 en_localhost_mavlink_udp 1 en_secondary_qgc: 0 secondary_qgc_ip: 192.168.1.214 qgc_udp_port_number: 14550 localhost_udp_port_number: 14551 udp_mtu: 512 en_vio: 1 en_voa: 1 en_send_vio_to_qgc: 1 en_send_voa_to_qgc: 0 en_set_clock_from_gps: 1 en_force_onboard_mav1_mode: 1 en_reset_px4_on_error: 1 qvio_auto_reset_quality: 0.000500 horizon_cal_tolerance: 0.300000 voa_upper_bound_m: -0.150000 voa_lower_bound_m: 0.150000 offboard_mode: figure_eight follow_tag_id: 0 figure_eight_move_home: 1 en_tag_fixed_frame: 0 fixed_frame_filter_len: 5 en_transform_mavlink_pos_setpoints_from_fixed_frame:0 ================================================================= loading extrinsics config file exising instance of voxl-vision-px4 found, attempting to stop it starting geometry module starting px4 monitor starting px4 mavlink starting udp mavlink Adding manual QGC IP address to udp connection list: 192.168.1.27 Added new UDP connection to 192.168.1.27 starting px4 shell starting fixed pose input starting vio manager starting tag manager starting voa manager starting offboard figure eight starting control input pipe Init complete, entering main loop Connected to voxl-mavlink-server Connected to voxl-dfs-server Connected to voxl-qvio-server updating to use imu: imu1 done updating transforms to use imu: imu1 Connected to TOF UDP recv msg ID: 0 sysid:255 from port: 14550 IP: 192.168.1.27 UDP recv msg ID: 0 sysid:255 from port: 14550 IP: 192.168.1.27 UDP recv msg ID: 0 sysid:255 from port: 14550 IP: 192.168.1.27 UDP recv msg ID: 0 sysid:255 from port: 14550 IP: 192.168.1.27 UDP recv msg ID: 0 sysid:255 from port: 14550 IP: 192.168.1.27But we were able to ping the Ip's of both voxl-cam and host pc.
How do we rectify it?
-
@tom
I have already followed the thread given here
Here is my output of the commandsystemctl status -l voxl-vision-px4voxl:~$ systemctl status -l voxl-vision-px4 ● voxl-vision-px4.service - voxl-vision-px4 Loaded: loaded (/usr/bin/voxl-vision-px4; enabled; vendor preset: enabled) Active: active (running) since Thu 1970-01-01 00:00:07 UTC; 1min 29s ago Main PID: 2029 (voxl-vision-px4) CGroup: /system.slice/voxl-vision-px4.service └─2029 /usr/bin/voxl-vision-px4 Jan 01 00:00:09 apq8096 voxl-vision-px4[2029]: Connected to voxl-qvio-server Jan 01 00:00:09 apq8096 voxl-vision-px4[2029]: updating to use imu: imu1 Jan 01 00:00:09 apq8096 voxl-vision-px4[2029]: done updating transforms to use imu: imu1 Jan 01 00:00:09 apq8096 voxl-vision-px4[2029]: Connected to voxl-dfs-server Jan 01 00:00:09 apq8096 voxl-vision-px4[2029]: Connected to voxl-mavlink-server Jan 01 00:00:10 apq8096 voxl-vision-px4[2029]: VIO reported failure Jan 01 00:01:10 apq8096 voxl-vision-px4[2029]: Disconnected from voxl-qvio-server Jan 01 00:01:11 apq8096 voxl-vision-px4[2029]: Connected to voxl-qvio-server Jan 01 00:01:11 apq8096 voxl-vision-px4[2029]: updating to use imu: imu1 Jan 01 00:01:11 apq8096 voxl-vision-px4[2029]: done updating transforms to use imu: imu1And I have already disabled my system firewall.
anubhav@anubhav-GF63-Thin-9SC:~$ sudo ufw status [sudo] password for anubhav: Status: inactiveand also tried flashing firmware again.
Still it's not getting connected to QGC.QGC output in terminal
anubhav@anubhav-GF63-Thin-9SC:~/Downloads$ ./QGroundControl.AppImage Settings location "/home/anubhav/.config/QGroundControl.org/QGroundControl.ini" Is writable?: true Filter rules "*Log.debug=false\nGStreamerAPILog.debug=true\nqt.qml.connections=false" System reported locale: QLocale(English, Latin, India) ; Name "en_IN" ; Preffered (used in maps): "en-IN" LocalizationLog: Qt lib localization for "en_IN" is not present LocalizationLog: Error loading source localization for "en_IN" LocalizationLog: Error loading json localization for "en_IN" serialnmea: No known GPS device found. Specify the COM port via QT_NMEA_SERIAL_PORT. VideoReceiverLog: Stop called on empty URI VideoReceiverLog: Stop called on empty URI MAVLinkLogManagerLog: MAVLink logs directory: "/home/anubhav/Documents/QGroundControl/Logs" Map Cache in: "/home/anubhav/.cache/QGCMapCache300" / "qgcMapCache.db" qml: QGCCorePlugin(0x5644b7af97a0) [] setCurrentPlanViewSeqNum setCurrentPlanViewSeqNum _recalcFlightPathSegments homePositionValid false _recalcFlightPathSegments homePositionValid false Adding target QHostAddress("192.168.1.26") 14550 "v4.2.0" -
Anyone knows how to rectify above problem, please help.
Thank you. -
@Anubhav ,
What about checking
voxl-inspect-servicesand check for thevoxl-mavlink-server?https://gitlab.com/voxl-public/voxl-sdk/services/voxl-mavlink-server
There's a
voxl-configure-mavlink-serverthat can be used if not running. -
Hi @modaltb,
I had checked for voxl-mavlink-server in voxl-inspect-services, it was enabled and running. also configured both voxl-mavlink-server and voxl-vision-px4 but it didn't got connected to QGC through UDP. -
Hi @modaltb,
As mentioned here I have deployed the voxl-mavlink-server in voxl-cam, I used following command in voxl-cross
./install_build_deps.sh apq8096 staging
./build.sh apq8096
./make_package.sh ipk
and at last successfully deployed it to voxl-cam .
I have run "voxl-mavlink-server" command and it's showing "PX4 is disconnected from UART" . output is attached below.voxl:~$ voxl-mavlink-server loading our own config file ================================================================= Parameters as loaded from config file: px4_uart_bus: 5 px4_uart_baudrate: 921600 udp_port_to_px4: 14556 udp_port_from_px4: 14557 ================================================================= exising instance of voxl-mavlink-server found, attempting to stop it Successfully opened mavparser Init complete, entering main loop PX4 DISCONNECTED FROM UARTIs because of this issue voxl-cam is not connecting to QGC over UDP?
This is the first time I run
voxl-mavlink-servercommand previous to this I was usingsystemctl start voxl-mavlink-serverand invoxl-inspect-servicesit used to show voxl-mavlink-server is runnig. and I didn't get message PX4 DISCONNECTED FROM UART when I runvoxl-vision-px4 --debug_udp_recv.
Below I have attached output ofvoxl-vision-px4 --debug_udp_recvvoxl:~$ voxl-vision-px4 --debug_udp_recv Enabling UDP recv debugging detected platform APQ8096 loading our own config file ================================================================= Parameters as loaded from config file: config file version: 1 qgc_ip: 192.168.1.27 en_secondary_qgc: 0 secondary_qgc_ip: 192.168.1.214 qgc_udp_port_number: 14550 udp_mtu: 512 en_localhost_mavlink_udp 1 localhost_udp_port_number: 14551 en_vio: 1 en_voa: 1 en_send_vio_to_qgc: 0 en_send_voa_to_qgc: 0 voa_upper_bound_m: -0.150000 voa_lower_bound_m: 0.150000 en_set_clock_from_gps: 1 en_force_onboard_mav1_mode: 1 en_reset_px4_on_error: 1 qvio_auto_reset_quality: 0.000500 horizon_cal_tolerance: 0.300000 offboard_mode: figure_eight follow_tag_id: 0 figure_eight_move_home: 1 en_tag_fixed_frame: 0 fixed_frame_filter_len: 5 en_transform_mavlink_pos_setpoints_from_fixed_frame:0 ================================================================= loading extrinsics config file starting geometry module starting px4 monitor starting px4 mavlink Connected to voxl-mavlink-server starting udp mavlink Adding manual QGC IP address to udp connection list: 192.168.1.27 Added new UDP connection to 192.168.1.27 starting px4 shell starting fixed pose input starting vio manager Connected to voxl-qvio-server updating to use imu: imu1 done updating transforms to use imu: imu1 starting tag manager starting voa manager ERROR validating VIO data received through pipe: read partial packet read 156 bytes, but it should be a multiple of 324 starting offboard figure eight starting control input pipe Init complete, entering main loop Connected to TOFThanks!
-
@Anubhav ,
When you connect the JST to USB cable, and get a connection from QGC to the Flight Core (eg "getting connected through usb-jst connector after enabling pixhwak device in QGC").
Can you go to Analyze Tools > MAVLink Console and run
mavlink status.For example, I have a VOXL2 here in this screen shot, and it's connected to a Flight Core, but it's not working yet, as in this case the Flight Core is transmitting data but not receiving data. I also see that "MAVLink version: 1" is there which to me normally indicates no bi-directional comms has occurred yet.
instance #1: mavlink chan: #1 type: GENERIC LINK OR RADIO flow control: ON rates: tx: 221.9 B/s txerr: 0.0 B/s tx rate mult: 0.682 tx rate max: 1200 B/s rx: 0.0 B/s rx loss: 0.0% FTP enabled: YES, TX enabled: YES mode: Normal MAVLink version: 1 transport protocol: serial (/dev/ttyS6 @57600)You can also see the serial port used in "transport protocol"
serial (/dev/ttyS6 @57600)this shows that this MAVLink instance is setup for /dev/ttyS6 --> UART7 --> Flight Core J5 here on my setup.For me, I enable voxl-mavlink-server on the VOXL side, then I get action, as seen here:
instance #1: mavlink chan: #1 type: GENERIC LINK OR RADIO flow control: ON rates: tx: 20.9 B/s txerr: 0.0 B/s tx rate mult: 0.682 tx rate max: 1200 B/s rx: 20.9 B/s rx loss: 0.0% received from sysid: 0 compid: 197: 14, lost: 0, last 292 ms ago FTP enabled: YES, TX enabled: YES mode: Normal MAVLink version: 2 transport protocol: serial (/dev/ttyS6 @57600)OK, back to VOXL-CAM and your issue (above was shown to you as to how I troubleshoot these connection issues).
For VOXL-CAM, the Flight Core connects to the VOXL using Flight Core J1 which is UART5 /
/dev/ttyS4This is TELEM2 by default, and should have the following:
- MAV_1_CONFIG 102
- MAV_1_MODE 2
- SER_TEL2_BAUD 921600
So you should be able to find a mavlink instance after running
mavlink statusand hopefully you see a node with:transport protocol: serial (/dev/ttyS4 @921600) -
Hi @modaltb,
I have connected voxl-cam to QGC by enabling pixhawk device in QGC. And run mavlink status command in mavlink console. I have attached the output below, it's after enabling and starting
voxl-mavlink-server.nsh> mavlink status instance #0: GCS heartbeat: 137312 us ago mavlink chan: #0 type: USB CDC flow control: OFF rates: tx: 21.913 kB/s txerr: 0.000 kB/s tx rate mult: 1.000 tx rate max: 800000 B/s rx: 0.046 kB/s FTP enabled: YES, TX enabled: YES mode: Config MAVLink version: 2 transport protocol: serial (/dev/ttyACM0 @2000000) ping statistics: last: 0.39 ms mean: 0.34 ms max: 840.70 ms min: 0.17 ms dropped packets: 0 instance #1: mavlink chan: #1 type: GENERIC LINK OR RADIO flow control: OFF rates: tx: 0.911 kB/s txerr: 0.000 kB/s tx rate mult: 1.000 tx rate max: 1200 B/s rx: 0.000 kB/s FTP enabled: YES, TX enabled: YES mode: Normal MAVLink version: 1 transport protocol: serial (/dev/ttyS6 @57600) instance #2: mavlink chan: #2 type: GENERIC LINK OR RADIO flow control: ON rates: tx: 12.740 kB/s txerr: 0.000 kB/s tx rate mult: 1.000 tx rate max: 46080 B/s rx: 0.000 kB/s FTP enabled: YES, TX enabled: YES mode: Onboard MAVLink version: 1 transport protocol: serial (/dev/ttyS4 @921600)- For instance #2 I am able to see node with
transport protocol: serial (/dev/ttyS4 @921600). - In instance #2 it's showing MAVLink version: 1. Why in this case there is uni-directional communication? Note: above output is after enabling and starting both
voxl-mavlink-serverandvoxl-vision-px4. - But in instance #0 it's showing MAVLink version: 2. So there is a bi-directional communication when connected to USB-JST connector. Is it right?
I have also tried mavlink status command after enabling both pixhawk and udp devices but the output was same as above.
Thanks!
- For instance #2 I am able to see node with
-
This
rx: 0.000 kB/sinstance 2 tells me it's not getting any data from VOXL.... This is the connection that provides that link: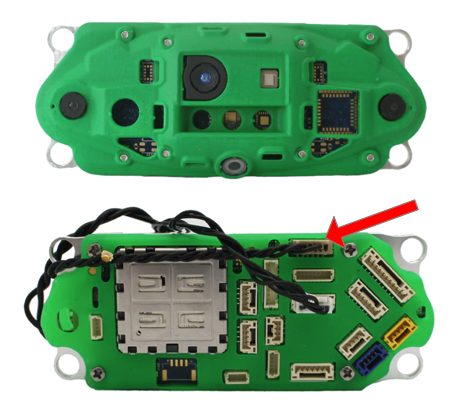
Can you confirm that this connection is in place?
You have
px4_uart_bus: 5 px4_uart_baudrate: 921600For voxl-mavlink-server which is correct. 5 = BLSP5 = J12 on VOXL1. It's configured for 921600. Your Flight Core is configured correctly too. So the last thing I would think to do is to probe with an oscilliscope if possible on that connector I pointed out and see if you have bi-directional data.
-
This post is deleted!