VOXL ESC 4 in 1 Fire
-
We had the voxl 4 in 1 mini esc catch on fire immediately after arming the vehicle. Initial default px4 params had max rpm at 7000 which was not enough to fly. I upped it to 12000 which was less than the 14300 max determined from the calibration procedure. It seems like maybe the idle RPM was kinda high and the ESC very aggressively ramps up to that speed.
- Motor and propeller used. Did you calibrate with propeller mounted? Brother Hobby Avenger 2806.5-1300kv and 7x4.5 2 blade prop
- Which esc you are using (Mxxxx number) - M0129-63-01
- which esc firmware was installed? - Can't find out now. Whatever it shipped with.
- Input voltage. Battery or power supply - Charged 4S lipo
- What test was actually run? Do you have exact command? - I armed the vehicle. All other pre tests for the calibration worked without issue.
- Do you have output of the calibration script? - pwm_vs_rpm_curve_a0 = -227.46924724435763, pwm_vs_rpm_curve_a1 = 0.9427038691914541, pwm_vs_rpm_curve_a2 = 5.562406707957121e-06
- did you load any params on the esc before the test? loaded param file below
- Can you describe the behavior in more detail. - Specifically at which point of the test the ESC started misbehaving - beginning of the test, middle, or end. What was the current drae reported by the test script - Immediately on arm sparks and flames. The ramp up to idle RPM seemed extremely aggressive. Previously had flown without fire but the initial arming still didn't sound great. One time arming caused vehicle to brown out.
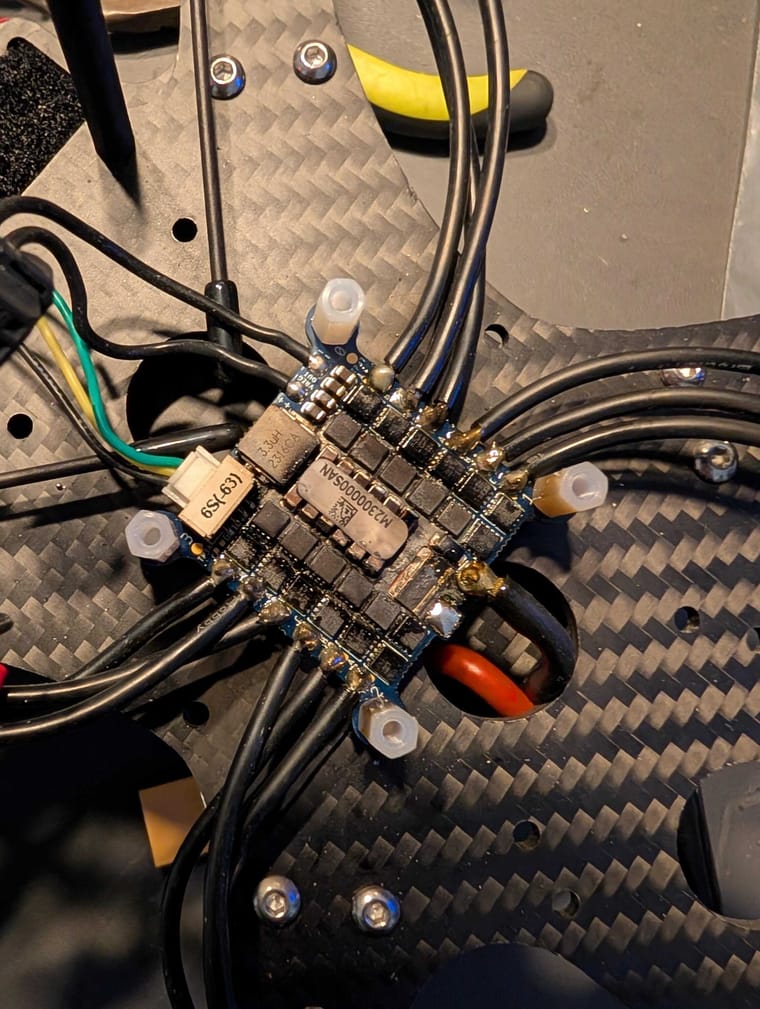
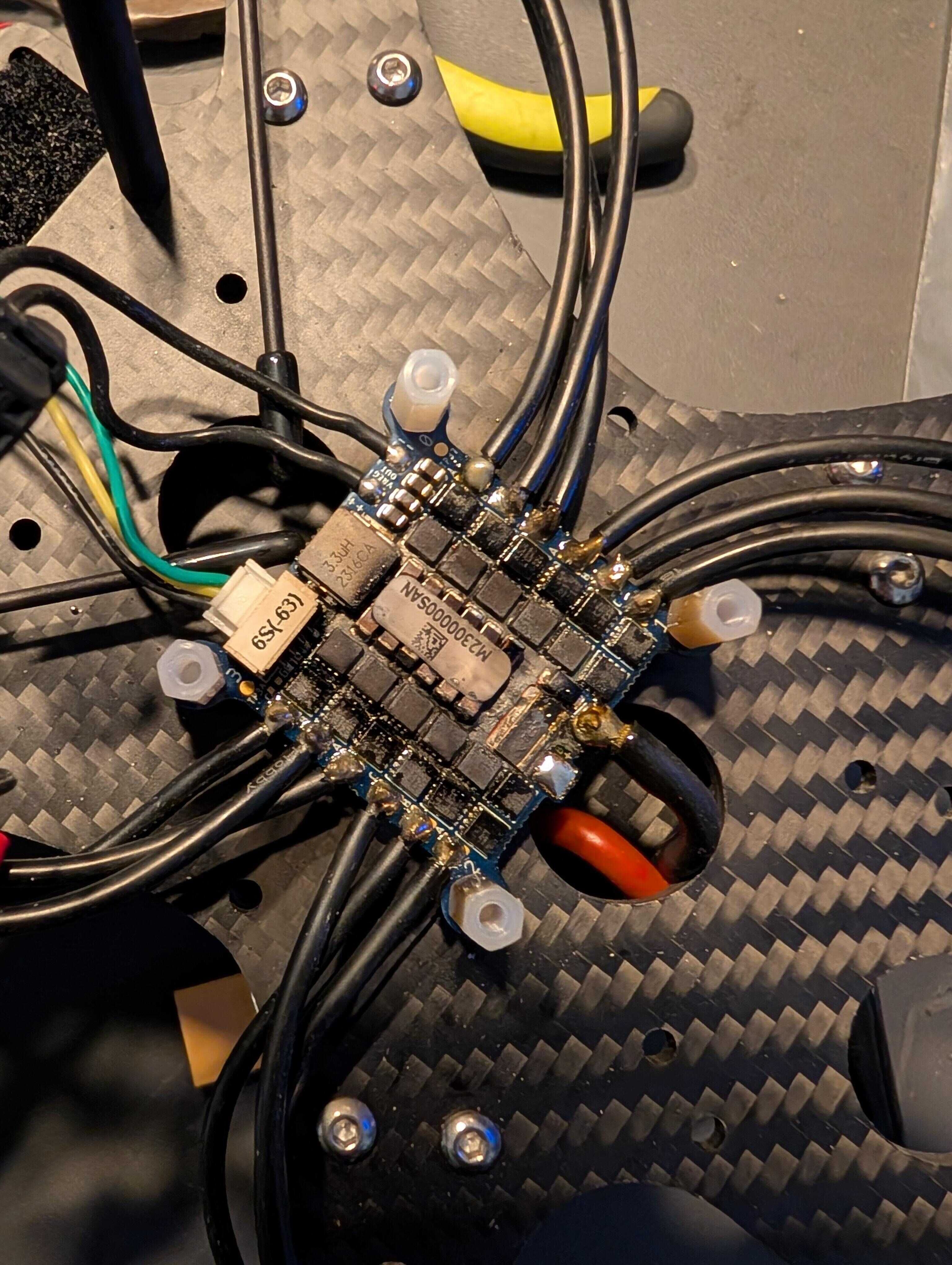
- Can you send a picture of the esc with damage? Attached. Pretty sure board had huge inrush starting motors, got too hot and positive lead desoldered itself and then shorted with gnd. Hard to tell what damage is from initial problem and being next to battery shorting.
Param file:
<EscParameters> <IdParams> <param name="id" value="127"/> <!-- 0-7 .. 127 means use hardware ID pins to read ID--> <param name="dir" value="2"/> <!-- 0=fwd, 1=rev, 2=fwd id-based, 3=rev id-based --> </IdParams> <UartParams> <param name="protocol_version" value="2"/> <!-- reserved for future use --> <param name="input_mode" value="0"/> <!-- reserved for future use --> <param name="baud_rate" value="2000000"/> <!-- SLOW for old SDK for now --> <param name="char_timeout_ns" value="0"/> <!-- not used --> <param name="cmd_timeout_ns" value="100000000"/> <!-- timeout for incoming commands before ESC will stop the motor --> </UartParams> <TuneParams> <param name="pwm_frequency" value="48000"/> <!-- switching freqency of PWM signal going to motors. 24Khz and 48Khz are only options for now --> <param name="vbat_nominal_mv" value="14800"/> <!-- used for sanity checking and limiting of voltage-dependent funcions --> <param name="num_cycles_per_rev" value="7"/> <!-- number of pole pairs in the motor. used for converting electrical frequency to mechanical rpm --> <param name="min_rpm" value="1900"/> <!-- minimum RPM that will be attempted, otherwise capped --> <param name="max_rpm" value="14300"/> <!-- maximum RPM that will be attempted, otherwise capped --> <param name="min_pwm" value="50"/> <!-- cap for minimum power to be ever applied. max is 999 --> <param name="max_pwm" value="999"/> <!-- cap for maximum power to be ever applied. max is 999 --> <param name="pwm_vs_rpm_curve_a0" value="-227.46924724435763"/> <!-- this is actually motor_voltage vs rpm curve.. using legacy naming --> <param name="pwm_vs_rpm_curve_a1" value="0.9427038691914541"/> <!-- Emax RS1306 3300KV with tri-blade 3x3x3 --> <param name="pwm_vs_rpm_curve_a2" value="5.562406707957121e-06"/> <param name="kp" value="250"/> <!-- RPM controller proportional gain --> <param name="ki" value="30"/> <!-- RPM controller proportional gain --> <param name="max_kpe" value="300"/> <!-- maximum proportional erorr term (max is 999) --> <param name="max_kie" value="100"/> <!-- maximum integral error term (max is 999) --> <param name="max_rpm_delta" value="3000"/> <!-- cap for maximum rpm error used in RPM controller --> <param name="spinup_type" value="0"/> <!-- 0: traditional, 1: sinusoidal --> <param name="spinup_power" value="70"/> <!-- power used to during spin-up procedure --> <param name="latch_power" value="80"/> <!-- power used during latching stage of spin-up (out of 999)--> <param name="spinup_power_ramp" value="8"/> <!-- it will take ( 4096 / (spinup_power_ramp*10000) ) seconds to ramp sinusoidal start-up power from 0 to spinup_power --> <param name="spinup_rpm_target" value="1000"/> <!-- Desired RPM at the end of the sinusoidal spin-up procedure --> <param name="spinup_time_ms" value="1000"/> <!-- Duration of the sinusoidal spin-up procedure --> <param name="spinup_bemf_comp" value="1"/> <!-- 0: disable, 1:enable back-emf compensation in sinusoidal spin-up procedure --> <param name="motor_kv" value="1300"/> <!-- kV value of the motor. used in back-emf compensation during spin-up --> <param name="min_num_cross_for_closed_loop" value="50"/> <!-- exit latching mode of fixed power after this number of zero crossings --> <param name="protection_stall_check_rpm" value="750"/> <!-- if motor spins below this RPM, stall check will trigger and stop / restart the motor --> <param name="brake_to_stop" value="0"/> <!-- apply brake when stopping motor (or not) --> <param name="stall_timeout_ns" value="20000000"/> <!-- after spin-up, if no zero crossing is not detected for this amount of time, motor is considered stalled --> <param name="require_reset_if_stalled" value="0"/> <!-- require sending an array of zero commands to reset before next spin-up, if motor stalled --> <param name="tone_freqs" value="[200, 215, 225, 250, 0,0,0,0, 0,0,0,0]"/> <!-- 200 is 2000Hz, max 255 --> <param name="tone_durations" value="[10, 10, 10, 10, 0,0,0,0, 0,0,0,0]"/> <!-- duration of each tone in units of 10 milli-seconds. Poor naming!!! --> <param name="tone_powers" value="[60, 60, 60, 60, 0,0,0,0, 0,0,0,0]"/> <!-- max is 255 --> <param name="dt_threshold_ns" value="150000"/> <!-- during start up, ignore inter-commutation times less than this val, probably noise --> <param name="max_dt_ns" value="2500000"/> <!-- min and max values for time between two commutations. these are used as caps --> <param name="min_dt_ns" value="10000"/> <param name="dt_bootstrap_ns" value="2000000"/> <!-- filter bootstrap value for commutation dt during start up --> <param name="spinup_stall_dt_ns" value="6000000"/> <!-- during spin-up, if no zero crossing is not detected for this amount of time, motor is considered stalled --> <param name="spinup_stall_check_ns" value="30000000"/> <!-- time after beginning of spinup to start checking for spinup stall --> <param name="alignment_time_ns" value="0"/> <!-- alignment time before spin-up --> <param name="timing_advance" value="0"/> <param name="sense_advance" value="0"/> <param name="demag_timing" value="0"/> <!-- unused --> </TuneParams> </EscParameters> -
Hello @awagner ,
I am sorry this happened to you. A few questions / comments:
It seems your motor is too large for this mini ESC
-

VOXL Mini 4-in-1 ESC Datasheet
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
- "This Mini ESC is designed for aerial vehicles under 750g (under 500g for FPV racing applications). For larger slow flying vehicles up to 1500g, please use the VOXL 4-in-1 ESC. For FPV racers exceeding 500g, please use VOXL 4-in-1 FPV ESC."
-
the kp value is very aggressive (typically i would recommend starting at 0 kp and ki (proportional and integral gains) and ramp those up to increase responsiveness.
-
the spin-up type should be set to 1 (sinusoidal), since it is much more reliable. Which parameters did you start with when you calibrated your ESC? i suspect that improper spin-up caused the ESC to get out of sync and fail due to excessive current.
I know it can be difficult to get started with using new hardware. Aside from the need for updated esc parameters, the issue here is that the mini ESC is not suitable for your motors / propellers. I strongly recommend upgrading to our FPV ESC , which is build to handle a lot of power and stress:
Once you get the FPV ESC, I can help with the tuning (let me know, i can provide updated params before you test gain).
Please submit an RMA request, https://www.modalai.com/pages/rma . I would recommend at least a discount on the new ESC. We will try to improve documentation to avoid this in the future.
Alex
-
-
Thank you Alex. We started with this param file: Seeker_V1_tmotor_f2203_1500kv_Param_Rev_A.xml from the voxl-esc params repo and I made a few tweaks like the vbat_nominal_mv and motor_kv and I verified the num_cycles_per_rev was correct for the new motor.
Also for my improving my knowledge so I don't make a mistake like this again how do you come to the conclusion it is too large? I knew it was on the edge based on the 750g number you provide but when I look at our ecalc numbers for this drone it says 3.75A per motor in a hover and 17A at full throttle per motor which seems well within the current specs listed.
I will do the RMA and get the FPV esc. Are you able to provide the updated param file in the meantime? Let me know if you need more info before you can generate that.
Anthony
-
Thank you Alex. We started with this param file: Seeker_V1_tmotor_f2203_1500kv_Param_Rev_A.xml from the voxl-esc params repo and I made a few tweaks like the vbat_nominal_mv and motor_kv and I verified the num_cycles_per_rev was correct for the new motor.
Also for my improving my knowledge so I don't make a mistake like this again how do you come to the conclusion it is too large? I knew it was on the edge based on the 750g number you provide but when I look at our ecalc numbers for this drone it says 3.75A per motor in a hover and 17A at full throttle per motor which seems well within the current specs listed.
I will do the RMA and get the FPV esc. Are you able to provide the updated param file in the meantime? Let me know if you need more info before you can generate that.
Anthony
@awagner ,
I think the main issue that started the failure mode was the spin-up type was set to 0 in params, which I do see that you got from the seeker_v1 xml file you mentioned. It is not your fault. The non-sinusoidal spinup is not as reliable and it is mostly not used any more. I will look at removing the old param files that use that option.
Let me explain the reasoning behind using a larger ESC, especially during initial testing:
- the larger (FPV) ESC can handle much larger currents and dissipate a lot more heat, so it can handle much larger glitches, which could arise from mis-configuration during initial testing
- the ESC firmware does have some timeouts for protection, which generally do prevent fatal issues like this, but if the glitch results in enough current to quickly burn out a mosfet, the ESC cannot recover. The larger ESC (with larger mosfets and larger thermal mass will take longer to burn out, so the ESC's timeout / glitch detector should save it)
- larger motors in general have larger stall current, which would result in large current if there is some glitch during start-up.
- based on the numbers that you provided for the motor spec calculator (3.75A hover / 17A max), it should be possible to tune the mini ESC to work, however there are still some things to consider:
- may need to add more bypass capacitance to handle larger current transients
- if the motor is stalled (due to impact, etc), there is still a bit higher risk of ESC burning out due to stall detection being a bit too late.
As for the xml to use as a starting point.. You can start with this one:
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/master/voxl-esc-params/D0020/m0138_3110_900kv_gemfan_10x4.5_tri.xmlThis is tuned for a 6S application 3110-size 900kV motor with a 10x4.5 tri-blade motor (pretty powerful configuration). You will need to update:
- voltage (6s to 4s)
- motor params (kv, rpm curve, etc)
- you can set the timing advance and sense advance from 20 to 0 (your application is likely not aggressive enough to require tweaking that), although you can do some bench testing to determine if you encounter de-syncs during large rpm transitions : https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/blob/master/voxl-esc-tools/doc/low_kv_motor_tuning.md
- you may need to adjust the spinup power / latch power -- generally keep it between 70-100 (7-10%) but when i tune this, i also usually find the minimum spin-up power that is able to reliably spin up the motor and then add a 10% extra (so 70->80). You can set spin-up power to a higher value in sinusoidal spin-up mode and it will produce a lot more torque, but will also consume more current. I usually try to limit a per motor spin-up current to 1-2 amps as a rule of thumb. for a fixed prop (not folding), your spin-up time can be anywhere between 500-1000ms, you can experiment. If you see the motor skipping during spinup and re-starting, you can increase either spin-up time or spinup power.
- may want to re-enable start-up beeps (disabled in this config)
- you can set kp (proportional gain) to 50 first (softer), then bump up to 100 or so, as you build confidence. higher kp will result in snappier response (faster than traditional ESCs without rpm control) but will also draw more current during transitions.
(with M0138, you should not need to add more bulk capacitance to ESC power).
With correctly tuned sinusoidal spin-up procedure, it should work pretty much 100% of the time (spin up on the first try every time). If you are seeing some inconsistent spin-up behavior, then it is possible there is some parameter issue and it needs to be investigated.
When you get your M0138, i suggest updating the params per my notes above and doing some bench testing using voxl-esc tools where you just spin up and stop motors many times in a row and make sure the spin-up is reliable.
Please let me know if you have any other questions!
Alex
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login