Firmware Structure (Adding VTOL support) - Clarifications
-
@garret The
install-voxl.shand related scripts are only there for developer use. They can help speed things up when making and testing many changes. Normally the package should be built and deployed. The default.px4board file controls what gets built. So, if you have new modules you first have to make sure they are built by adding them into that file. There is one for the Linux side (akavoxl2) and one for the DSP side (akavoxl2-slpi). High level stuff like Mavlink and logging go on the Linux side, all real time flight control functionality goes on the DSP side. Once it has been built it needs to be started. That is done by adding the start command into the startup fileboards/modalai/voxl2/target/voxl-px4-start. If the driver / module is on the DSP side it has to be started with theqshellcommand.@Eric-Katzfey Those timeouts indicate that the processor is overloaded. Perhaps try enabling the new modules one by one to see if you can figure out which one is taking up too much time.
-
@Eric-Katzfey Those timeouts indicate that the processor is overloaded. Perhaps try enabling the new modules one by one to see if you can figure out which one is taking up too much time.
@Eric-Katzfey surprisingly after leaving voxl2 overnight the QGC connection stopped being an issue. However, baro/mag timeout still occurs.
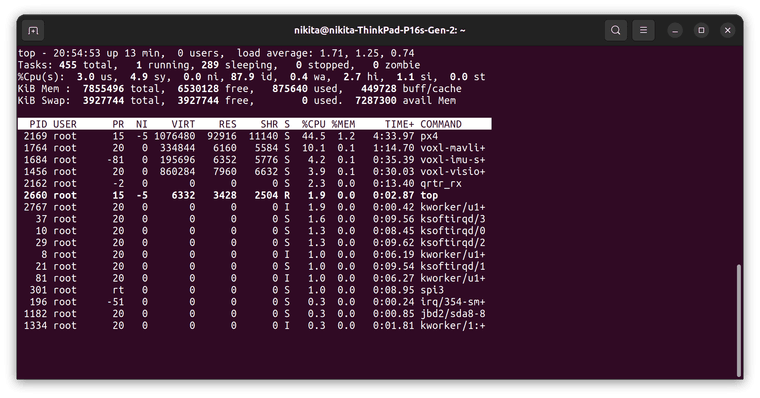
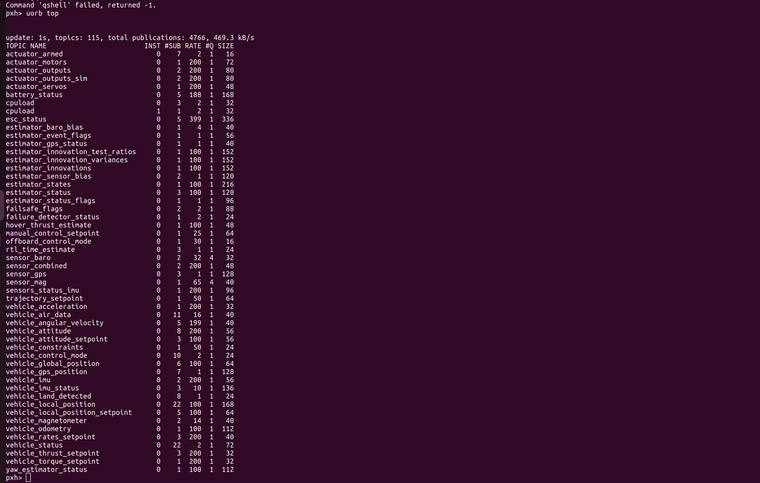
However, I wonder how I can check if this is indeed processor overload. When I am running voxl-px4-hitl + connect voxl2 to QGC the total CPU usage is only slightly over 70%:
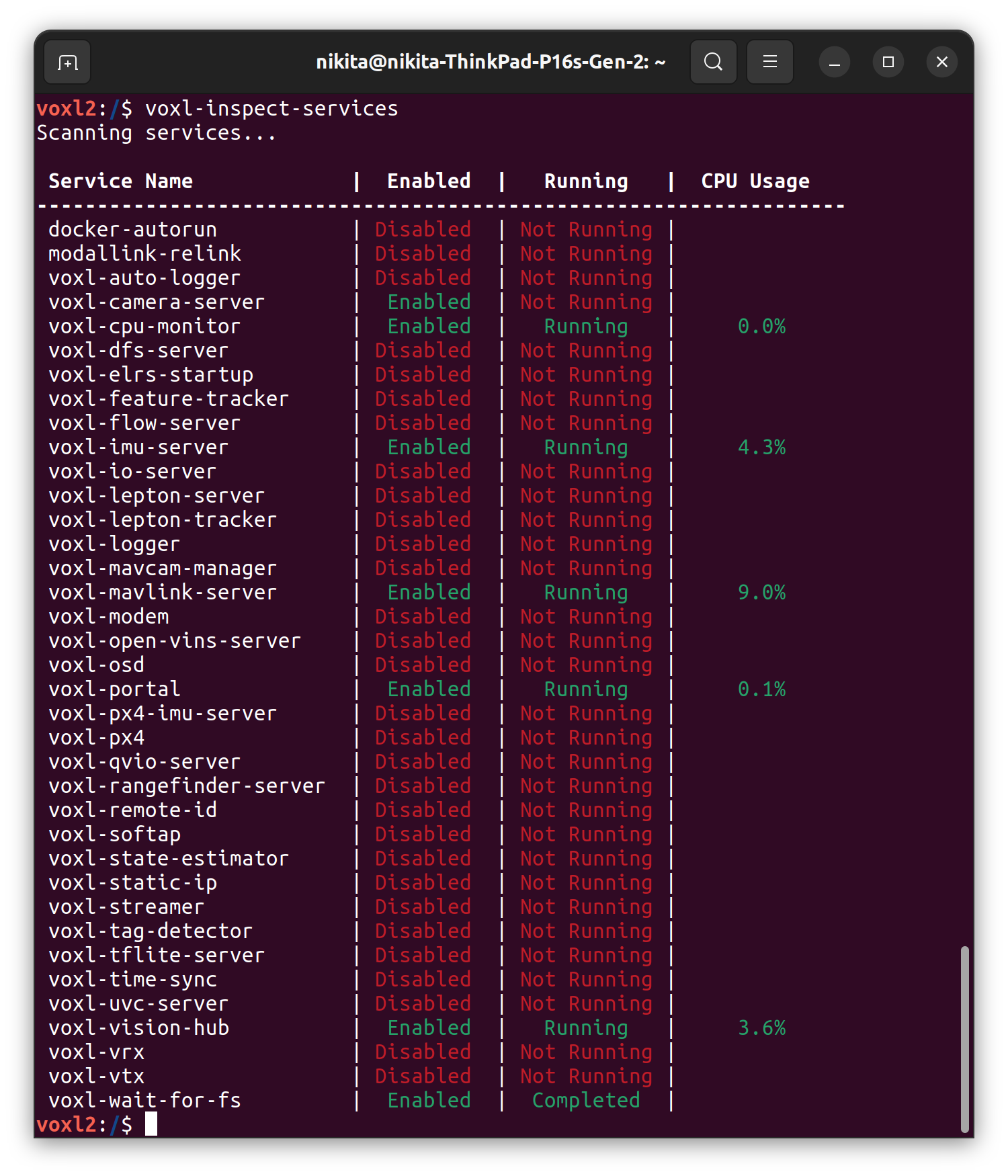
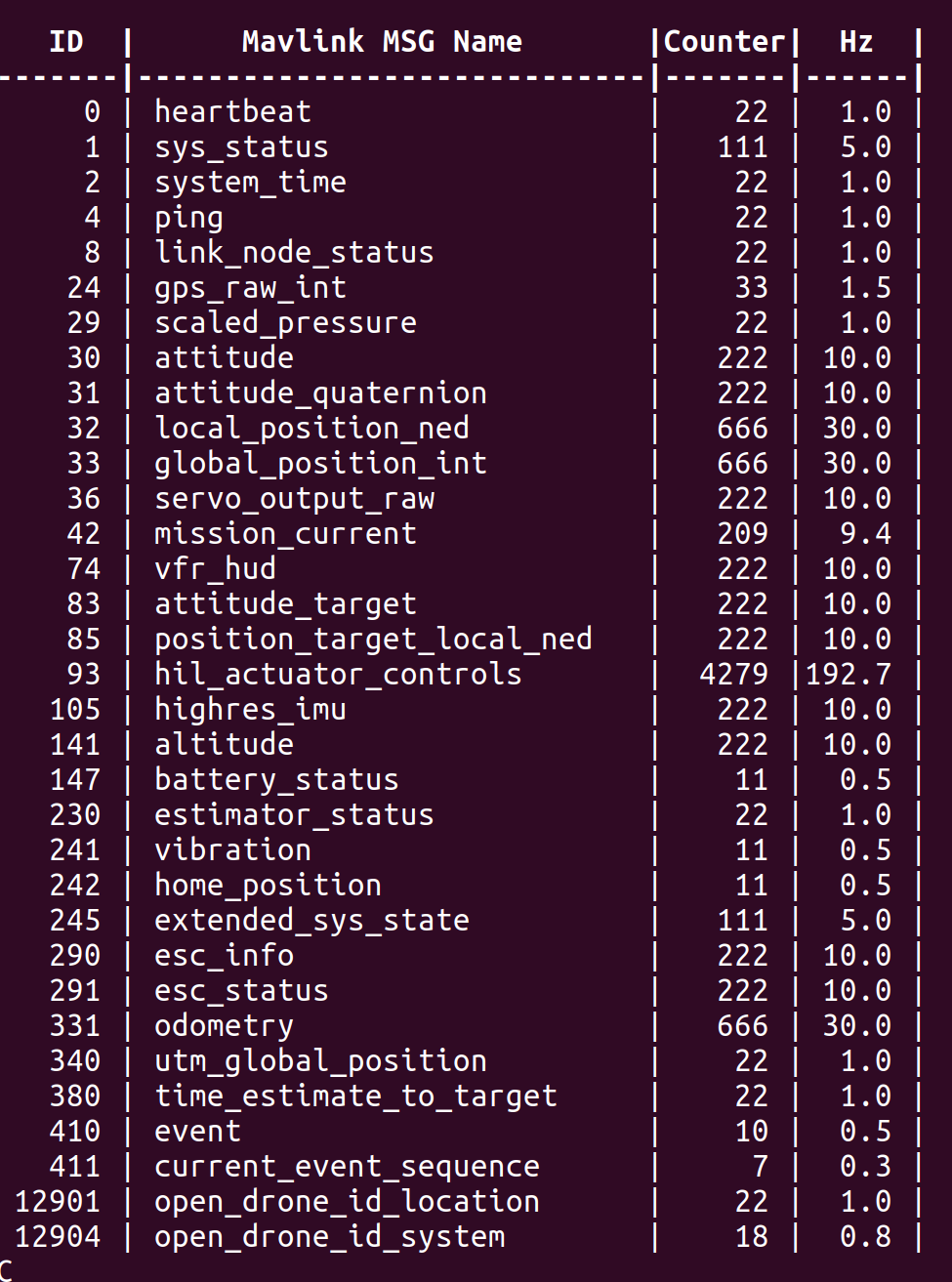
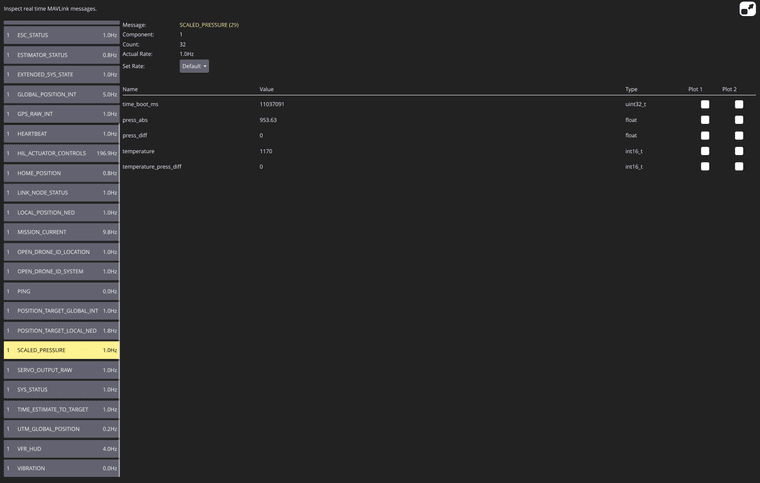
Similarly, when I looked at mavlink messages, nothing really stood out as too heavy:
-
onboard services:
-
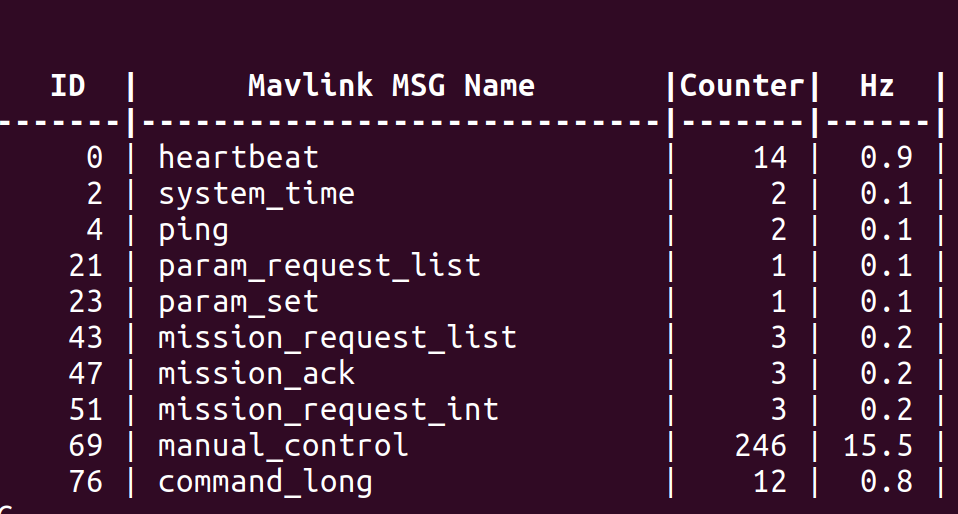
from gcs:
Some of the things I tried:
- adjusting -r parameter in
voxl-px4-hitl-startscript. I went as high as 500000. That affected neither the cpu use nor the frequency of timeout error for baro/mag. Specifically, this is line I changed
# start the onboard fast link to connect to voxl-mavlink-server mavlink start -x -u 14556 -o 14557 -r 100000 -n lo -m onboard- I also tried adjusting upd_mtu in
/etc/modalai/voxl-mavlink-server.conf. I went as high as 300, but it had no effect either. - adjusted dsp_hitl baudrate to 2000000 in
voxl-px4-hitl-start. Also with little to no effect
qshell dsp_hitl start -g -m -o -b 2000000Correct me if I am wrong, but as far as I understand the issue must be DSP communicating with Linux side. Where could I look to try and speed it up if possible?
i also may be able to get ARK V6 Flight Controller to run with voxl2 - would that be able to solve my issue?
Thank you in advance for your response
-
-
@Eric-Katzfey surprisingly after leaving voxl2 overnight the QGC connection stopped being an issue. However, baro/mag timeout still occurs.
However, I wonder how I can check if this is indeed processor overload. When I am running voxl-px4-hitl + connect voxl2 to QGC the total CPU usage is only slightly over 70%:
Similarly, when I looked at mavlink messages, nothing really stood out as too heavy:
-
onboard services:
-
from gcs:
Some of the things I tried:
- adjusting -r parameter in
voxl-px4-hitl-startscript. I went as high as 500000. That affected neither the cpu use nor the frequency of timeout error for baro/mag. Specifically, this is line I changed
# start the onboard fast link to connect to voxl-mavlink-server mavlink start -x -u 14556 -o 14557 -r 100000 -n lo -m onboard- I also tried adjusting upd_mtu in
/etc/modalai/voxl-mavlink-server.conf. I went as high as 300, but it had no effect either. - adjusted dsp_hitl baudrate to 2000000 in
voxl-px4-hitl-start. Also with little to no effect
qshell dsp_hitl start -g -m -o -b 2000000Correct me if I am wrong, but as far as I understand the issue must be DSP communicating with Linux side. Where could I look to try and speed it up if possible?
i also may be able to get ARK V6 Flight Controller to run with voxl2 - would that be able to solve my issue?
Thank you in advance for your response
-
-
@garret You need to look at the CPU utilization in the DSP where the majority of the PX4 code is running.
topwill show you only what's happening on the applications processor (Linux) side. The PX4 log contains this information. -
@garret If the Iris configuration doesn't produce timeouts then possibly it's Gazebo not sending sensor updates fast enough. But I'm just guessing at this point. We've never tried a VTOL configuration so you are in new territory here. I'd first take a PX4 log and verify that the DSP CPU load is not exceeding 65 - 70%. Then perhaps start putting some diagnostic prints around the reception of the sensor messages from Gazebo and see how often they are being sent. Just have to start isolating the root cause.
-
@garret If the Iris configuration doesn't produce timeouts then possibly it's Gazebo not sending sensor updates fast enough. But I'm just guessing at this point. We've never tried a VTOL configuration so you are in new territory here. I'd first take a PX4 log and verify that the DSP CPU load is not exceeding 65 - 70%. Then perhaps start putting some diagnostic prints around the reception of the sensor messages from Gazebo and see how often they are being sent. Just have to start isolating the root cause.
@Eric-Katzfey I tried examining the logs for default modal AI px4 firmware IRIS configuration and my customized firmware with vtol modules enabled. Strangely, the CPU usage seems identical and above 75% even in the default case.
Log plots here: https://drive.google.com/file/d/1UZfAYMRQ-VfYnyf1u__l9NAUHnM8Q0PJ/view?usp=sharing.
I assume one of the cpus is the apps one and the other is the dsp one. This is still strange, since according to my comment above the total cpu usage of the apps was slightly over 70%.
@garret said in Firmware Structure (Adding VTOL support) - Clarifications:
total CPU usage is only slightly over 70%
As for the gazebo sending messages, still looking into it. However, I did some quick diagnostic and found that gazebo's publication rate seems sufficient:
- IRIS case
root@nikita-ThinkPad-P16s-Gen-2:/usr/workspace/voxl2_hitl_gazebo# gz topic -d 1 -z /gazebo/modalai_world/modalai/mag Hz: 89.91 Hz: 88.87 Hz: 76.84 Hz: 105.65 Hz: 87.52 Hz: 90.77 Hz: 83.98 Hz: 85.79 Hz: 57.25 Hz: 134.63 Hz: 82.31 Hz: 88.04 Hz: 48.27 Hz: 227.83 Hz: 87.30 Hz: 75.15 Hz: 60.36 Hz: 105.97 Hz: 101.91 Hz: 92.13 Hz: 89.28 Hz: 83.36 Hz: 88.95 Hz: 88.49 Hz: 55.99 Hz: 156.46 Hz: 85.59 Hz: 90.70 Hz: 50.35 Hz: 129.66 Hz: 92.53 Hz: 87.62 Hz: 84.50 Hz: 66.56 Hz: 90.34 Hz: 89.11 Hz: 73.71 Hz: 58.14 Hz: 117.21 Hz: 88.86 Hz: 49.12 Hz: 179.37 Hz: 91.40 Hz: 89.39 Hz: 62.59 Hz: 108.00 Hz: 87.86 Hz: 75.88 Hz: 84.17 Hz: 77.79 Hz: 72.78 Hz: 87.25 Hz: 93.21 Hz: 64.89 Hz: 73.10 Hz: 92.97 Hz: 53.24 Hz: 196.72 Hz: 90.09 Hz: 89.55 Hz: 48.60 Hz: 121.67 Hz: 68.07 Hz: 96.66 Hz: 91.59 Hz: 89.99 Hz: 91.62 Hz: 72.11 Hz: 91.43 Hz: 78.47 Hz: 91.06 Hz: 81.71 Hz: 72.23 Hz: 93.85 Hz: 82.83 Hz: 84.47 Hz: 73.80 Hz: 114.91 Hz: 85.34 Hz: 95.42 Hz: 79.51 root@nikita-ThinkPad-P16s-Gen-2:/usr/workspace/voxl2_hitl_gazebo# gz topic -d 1 -z /gazebo/modalai_world/modalai/baro Hz: 45.30 Hz: 33.52 Hz: 40.19 Hz: 38.64 Hz: 39.93 Hz: 45.78 Hz: 41.65 Hz: 42.63 Hz: 44.85 Hz: 39.09 Hz: 45.65 Hz: 36.76 Hz: 41.51 Hz: 43.36 Hz: 34.07 Hz: 47.10 Hz: 45.87 Hz: 39.17 Hz: 53.24 Hz: 40.17 Hz: 37.47 Hz: 37.41 Hz: 50.90 Hz: 37.27 Hz: 53.60 Hz: 38.04 Hz: 45.86 Hz: 43.55 Hz: 43.98 Hz: 44.47 Hz: 40.48 Hz: 39.65 Hz: 44.65 Hz: 43.66 Hz: 41.32 Hz: 42.98 Hz: 40.23 Hz: 44.23 Hz: 42.25 Hz: 30.15- VTOL case
root@nikita-ThinkPad-P16s-Gen-2:/usr/workspace/voxl2_hitl_gazebo# gz topic -d 1 -z /gazebo/standard_vtol_hitl_world/standard_vtol_hitl/mag Hz: 261.34 Hz: 268.29 Hz: 165.38 Hz: 301.10 Hz: 219.42 Hz: 318.94 Hz: 258.53 Hz: 260.81 Hz: 259.69 Hz: 261.20 Hz: 230.35 Hz: 246.97 Hz: 105.02 Hz: 27011.70 Hz: 584.93 Hz: 245.19 Hz: 210.23 Hz: 137.50 Hz: 317.01 Hz: 217.37 Hz: 213.23 Hz: 245.10 Hz: 102.70 Hz: 7085.62 Hz: 255.86 Hz: 214.26 Hz: 358.80 Hz: 135.56 Hz: 601.92 Hz: 197.99 Hz: 289.66 Hz: 146.01 Hz: 710.52 Hz: 285.12 Hz: 183.18 Hz: 283.64 Hz: 267.36 Hz: 196.66 Hz: 293.54 Hz: 261.75 Hz: 189.79 Hz: 285.15 Hz: 269.74 Hz: 210.62 Hz: 247.68 Hz: 278.95 Hz: 92.07 Hz: 9.93 Hz: 39858.11 Hz: 249.81 Hz: 2192.14 Hz: 263.26 Hz: 255.81 Hz: 268.84 Hz: 204.21 Hz: 119.26 Hz: 9.63 Hz: 9.72 Hz: 9.71 Hz: 9.96 Hz: 2776.08 Hz: 133.24 Hz: 274.92 Hz: 823.84 Hz: 202.26 Hz: 276.13 Hz: 276.10 Hz: 216.36 Hz: 339.81 Hz: 270.43 Hz: 266.76 Hz: 261.38 Hz: 265.82 Hz: 268.36 Hz: 256.52 Hz: 276.77 Hz: 93.41 Hz: 1257.61 Hz: 263.08 Hz: 263.41 Hz: 146.94 Hz: 270.98 Hz: 243.40 Hz: 283.23 Hz: 150.90 Hz: 1511.17 Hz: 274.21 Hz: 258.02 Hz: 144.53 Hz: 2885.13 Hz: 247.98 Hz: 137.59 Hz: 829.43 Hz: 247.74 Hz: 254.85 Hz: 264.31 Hz: 209.19 Hz: 275.45 Hz: 267.43 Hz: 270.33 Hz: 245.57 Hz: 228.72 Hz: 232.26 Hz: 264.85 Hz: 93.60 Hz: 49265.94 Hz: 499.46 Hz: 233.43 Hz: 273.17 Hz: 234.92 Hz: 233.14 Hz: 258.48 Hz: 278.42 Hz: 225.91 Hz: 280.44 Hz: 135.68 Hz: 276.36 Hz: 134.54 Hz: 282.50 root@nikita-ThinkPad-P16s-Gen-2:/usr/workspace/voxl2_hitl_gazebo# gz topic -d 1 -z /gazebo/standard_vtol_hitl_world/standard_vtol_hitl/baro Hz: 132.49 Hz: 129.18 Hz: 129.00 Hz: 130.49 Hz: 111.43 Hz: 151.83 Hz: 97.87 Hz: 133.37 Hz: 108.81 Hz: 145.29 Hz: 88.34 Hz: 257.54 Hz: 127.70 Hz: 102.37 Hz: 131.12 Hz: 124.66 Hz: 104.16 Hz: 135.17 Hz: 117.07 Hz: 123.88 Hz: 134.75 Hz: 130.16 Hz: 134.76 Hz: 70.86 Hz: 577.87 Hz: 123.25 Hz: 120.28 Hz: 104.71 Hz: 179.62 Hz: 125.18 Hz: 119.61 Hz: 121.50 Hz: 148.17 Hz: 126.87 Hz: 103.36 Hz: 132.89 Hz: 145.11 Hz: 114.83 Hz: 113.25 Hz: 148.53 Hz: 132.36 Hz: 128.08 Hz: 124.23 Hz: 72.73 Hz: 282.04 Hz: 127.52 Hz: 128.52 Hz: 124.72 Hz: 121.43 Hz: 112.05 Hz: 126.82 Hz: 108.68 Hz: 165.72 Hz: 128.03 Hz: 124.98 Hz: 100.47 Hz: 9.51 Hz: 137.65 Hz: 93.98 Hz: 88.69 Hz: 135.25 Hz: 129.01 Hz: 130.18 Hz: 89.62 Hz: 143.84 Hz: 126.38 Hz: 138.17 Hz: 133.42 Hz: 122.09 Hz: 136.52 Hz: 136.22 Hz: 117.27 Hz: 54.04 Hz: 39575.75 Hz: 160.93 Hz: 127.02 Hz: 87.96 Hz: 260.10 Hz: 93.48 Hz: 110.70 Hz: 144.94 Hz: 129.48 Hz: 132.85 Hz: 119.29 Hz: 123.63 Hz: 143.99 Hz: 103.66 Hz: 136.10 Hz: 9.17Weirdly there is some frequency jumps with VTOL world. Could this be the cause of the error? If you have an idea where these come from , I would appreciate the hint.
Although, when looking at the logs again, this is the magnetometer plots:https://drive.google.com/file/d/1yxWfiHGunIUJAk8WNnSOku5CxXks31so/view?usp=sharing
Apologies for small dot thickness, but it can be noted that magnetometer coming from the vehicle is at twice the frequency that it is coming from the sensor. Ironically, these rates are also off from the frequencies pasted above. For IRIS default the vehicle's magnetometer is at about 2Hz, and same for VTOL. Sensor frequency for IRIS is about 1Hz and same for VTOL. I wonder how this is possible, since for EKF2 to run smoothly it requires at least 5Hz update rate on sensors. I assume I am misinterpreting the data, so if you spot a mistake in my analysis please let me know.
-
@garret If the Iris configuration doesn't produce timeouts then possibly it's Gazebo not sending sensor updates fast enough. But I'm just guessing at this point. We've never tried a VTOL configuration so you are in new territory here. I'd first take a PX4 log and verify that the DSP CPU load is not exceeding 65 - 70%. Then perhaps start putting some diagnostic prints around the reception of the sensor messages from Gazebo and see how often they are being sent. Just have to start isolating the root cause.
@Eric-Katzfey An update from me:
I have looked at the cpu usage from voxl-portal and got even more confused. When comparing with my previous posts, the results differ again. To summarize:
- after adb shell into voxl2, "top" suggested total linux cpu usage of ~70% when running px4
- voxl-inspect-services gave about ~15%
- PX4 logs give varying cpu usage from 0% to 88% depending on the core
- voxl portal outputs about 10% cpu usage on every core when running px4 hitl sim.
Is there a reason all these sources differ so much?
I also looked further into potential reasons for timeout errors on vtol. Keeping px4 parameters identical, the error shows up only when loading a vtol frame in gazebo docker. I wonder if there is anything special that you can think of about how gazebo docker is treating a vtol vs multicopter? I looked into both .world and .sdf files line by line, but nothing stood out. Wondering if there is something I am missing somewhere else.
Lastly, to follow up on super low rate for "sensor_mag" and "vehicle_magnetometer" from the px4 log.
@garret said in Firmware Structure (Adding VTOL support) - Clarifications:Identical frequency in both multicopter and vtol case makes me wonder if there is a hardcoded bottleneck somewhere for this specific data - could you point it out to me if that is the case?
Hoping to hear from you and thank you for your cooperation.
-
@Eric-Katzfey An update from me:
I have looked at the cpu usage from voxl-portal and got even more confused. When comparing with my previous posts, the results differ again. To summarize:
- after adb shell into voxl2, "top" suggested total linux cpu usage of ~70% when running px4
- voxl-inspect-services gave about ~15%
- PX4 logs give varying cpu usage from 0% to 88% depending on the core
- voxl portal outputs about 10% cpu usage on every core when running px4 hitl sim.
Is there a reason all these sources differ so much?
I also looked further into potential reasons for timeout errors on vtol. Keeping px4 parameters identical, the error shows up only when loading a vtol frame in gazebo docker. I wonder if there is anything special that you can think of about how gazebo docker is treating a vtol vs multicopter? I looked into both .world and .sdf files line by line, but nothing stood out. Wondering if there is something I am missing somewhere else.
Lastly, to follow up on super low rate for "sensor_mag" and "vehicle_magnetometer" from the px4 log.
@garret said in Firmware Structure (Adding VTOL support) - Clarifications:Identical frequency in both multicopter and vtol case makes me wonder if there is a hardcoded bottleneck somewhere for this specific data - could you point it out to me if that is the case?
Hoping to hear from you and thank you for your cooperation.
@garret You have to be careful looking at CPU utilization on the Linux side. Sometimes the number reflects usage on a single core or the usage of a single process and sometimes it is total usage across all cores. The utilization on the DSP is what usually matters more for PX4 since most of the code runs on the DSP.
-
@Eric-Katzfey An update from me:
I have looked at the cpu usage from voxl-portal and got even more confused. When comparing with my previous posts, the results differ again. To summarize:
- after adb shell into voxl2, "top" suggested total linux cpu usage of ~70% when running px4
- voxl-inspect-services gave about ~15%
- PX4 logs give varying cpu usage from 0% to 88% depending on the core
- voxl portal outputs about 10% cpu usage on every core when running px4 hitl sim.
Is there a reason all these sources differ so much?
I also looked further into potential reasons for timeout errors on vtol. Keeping px4 parameters identical, the error shows up only when loading a vtol frame in gazebo docker. I wonder if there is anything special that you can think of about how gazebo docker is treating a vtol vs multicopter? I looked into both .world and .sdf files line by line, but nothing stood out. Wondering if there is something I am missing somewhere else.
Lastly, to follow up on super low rate for "sensor_mag" and "vehicle_magnetometer" from the px4 log.
@garret said in Firmware Structure (Adding VTOL support) - Clarifications:Identical frequency in both multicopter and vtol case makes me wonder if there is a hardcoded bottleneck somewhere for this specific data - could you point it out to me if that is the case?
Hoping to hear from you and thank you for your cooperation.
@garret Unfortunately, I only have experience with the IRIS model in Gazebo so cannot comment on why it would act differently with the VTOL.
-
@Eric-Katzfey An update from me:
I have looked at the cpu usage from voxl-portal and got even more confused. When comparing with my previous posts, the results differ again. To summarize:
- after adb shell into voxl2, "top" suggested total linux cpu usage of ~70% when running px4
- voxl-inspect-services gave about ~15%
- PX4 logs give varying cpu usage from 0% to 88% depending on the core
- voxl portal outputs about 10% cpu usage on every core when running px4 hitl sim.
Is there a reason all these sources differ so much?
I also looked further into potential reasons for timeout errors on vtol. Keeping px4 parameters identical, the error shows up only when loading a vtol frame in gazebo docker. I wonder if there is anything special that you can think of about how gazebo docker is treating a vtol vs multicopter? I looked into both .world and .sdf files line by line, but nothing stood out. Wondering if there is something I am missing somewhere else.
Lastly, to follow up on super low rate for "sensor_mag" and "vehicle_magnetometer" from the px4 log.
@garret said in Firmware Structure (Adding VTOL support) - Clarifications:Identical frequency in both multicopter and vtol case makes me wonder if there is a hardcoded bottleneck somewhere for this specific data - could you point it out to me if that is the case?
Hoping to hear from you and thank you for your cooperation.
@garret This is the code that deals with the Mavlink messages coming in from Gazebo and the sending of Mavlink messages back to Gazebo: https://github.com/modalai/px4-firmware/blob/voxl-dev/boards/modalai/voxl2-slpi/src/drivers/dsp_hitl/dsp_hitl.cpp
-
@garret This is the code that deals with the Mavlink messages coming in from Gazebo and the sending of Mavlink messages back to Gazebo: https://github.com/modalai/px4-firmware/blob/voxl-dev/boards/modalai/voxl2-slpi/src/drivers/dsp_hitl/dsp_hitl.cpp
@Eric-Katzfey I am 99% confident I found the issue. When running gazebo for IRIS, the real time factor is 1. When running vtol the real time factor drops to ~0.5 or lower. I just tried running gazebo for iris and manually lower the real time factor. i was able to replicate the issue. I think it is because in the mavlink communication script you shared the update for mag and baro happens only in cases where HIL_SENSOR messege is receiver. If the message is delayed, the sensors timeout.
I will start looking into troubleshooting, but if you know what can be done to speed up gazebo's computation or to ease the load of VTOL model, I would appreciate the hint
-
@Eric-Katzfey I am 99% confident I found the issue. When running gazebo for IRIS, the real time factor is 1. When running vtol the real time factor drops to ~0.5 or lower. I just tried running gazebo for iris and manually lower the real time factor. i was able to replicate the issue. I think it is because in the mavlink communication script you shared the update for mag and baro happens only in cases where HIL_SENSOR messege is receiver. If the message is delayed, the sensors timeout.
I will start looking into troubleshooting, but if you know what can be done to speed up gazebo's computation or to ease the load of VTOL model, I would appreciate the hint
@garret I also wonder if there is a reason for running gazebo provided in docker except for iris comparability? Could i theoretically run voxl2 with a newer version of gazebo? It seems like those might be more efficient with modelling physics
-
@garret This is the code that deals with the Mavlink messages coming in from Gazebo and the sending of Mavlink messages back to Gazebo: https://github.com/modalai/px4-firmware/blob/voxl-dev/boards/modalai/voxl2-slpi/src/drivers/dsp_hitl/dsp_hitl.cpp
@Eric-Katzfey good afternoon, still working on this - was wondering if you know how to enable airspeed sensor for the hitl sim? I think I am getting closer to finishing the vtol setup for hitl sim, but need this piece of the puzzle
-
@Eric-Katzfey good afternoon, still working on this - was wondering if you know how to enable airspeed sensor for the hitl sim? I think I am getting closer to finishing the vtol setup for hitl sim, but need this piece of the puzzle
@garret As best I can tell the diff_pressure field in the Mavlink HIL_SENSOR message sent from Gazebo would have this info but it is an optional field so not sure if Gazebo is actually populating it. If it is then it will be made available within PX4 via the differential_pressure topic.
-
@garret As best I can tell the diff_pressure field in the Mavlink HIL_SENSOR message sent from Gazebo would have this info but it is an optional field so not sure if Gazebo is actually populating it. If it is then it will be made available within PX4 via the differential_pressure topic.
@Eric-Katzfey gazebo evidently is not publishing diff_pressure but I am confused as to why. from what I have seen online, usually it just works out of the box for people when they build the world. i even checked all the .sdf models in the gazebo classic repo and all the mavlink plugins for fixed wing and for quads are identical. where would this be configured ?
all I see in gazebo is the airspeed topic like such:
gz topic -d 4 -e /gazebo/standard_vtol_hitl_world/standard_vtol_hitl/airspeed/link/airspeed time { sec: 5204 nsec: 800000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.6875033675151349e-06 longitude_deg: -8.0985729541323173e-06 altitude: 21.067402929998934 velocity_east: 0.0041351439189235657 velocity_north: 0.014366458095080673 velocity_up: -0.077853461599531493 time { sec: 5205 nsec: 0 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.65648519834101e-06 longitude_deg: -8.0864227239372417e-06 altitude: 21.051106543280184 velocity_east: 0.0091959411425546929 velocity_north: 0.01927891127394361 velocity_up: -0.07690062638957737 time { sec: 5205 nsec: 200000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.6218446606961743e-06 longitude_deg: -8.0702784253073972e-06 altitude: 21.037869208492339 velocity_east: 0.0070925229066759387 velocity_north: 0.018342345861654636 velocity_up: -0.059754401868207442 time { sec: 5205 nsec: 400000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.5894898632271678e-06 longitude_deg: -8.06327351450745e-06 altitude: 21.026238181628287 velocity_east: 0.0012297001505018705 velocity_north: 0.018024321587302515 velocity_up: -0.052280255081160854 time { sec: 5205 nsec: 600000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.5569699380192946e-06 longitude_deg: -8.06390211416581e-06 altitude: 21.017491457983851 velocity_east: -0.001618067383164185 velocity_north: 0.017209061152664136 velocity_up: -0.039400112952817 time { sec: 5205 nsec: 800000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.5292924599121225e-06 longitude_deg: -8.0691216897048133e-06 altitude: 21.008538438007236 velocity_east: -0.0040763711507462008 velocity_north: 0.013864325720556073 velocity_up: -0.0538369387758966 time { sec: 5206 nsec: 0 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.5047486190666175e-06 longitude_deg: -8.0773220885855787e-06 altitude: 20.995235768146813 velocity_east: -0.0045764253450751866 velocity_north: 0.013940962132516522 velocity_up: -0.077954621888091963 time { sec: 5206 nsec: 200000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4757025411756733e-06 longitude_deg: -8.08466180642776e-06 altitude: 20.978572748601437 velocity_east: -0.0033555745179364043 velocity_north: 0.017347668957779176 velocity_up: -0.073148434894389075 time { sec: 5206 nsec: 400000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4462882142533986e-06 longitude_deg: -8.0904497539150887e-06 altitude: 20.967332033440471 velocity_east: -0.0037972556503345928 velocity_north: 0.014495664657131601 velocity_up: -0.046656718127848877 time { sec: 5206 nsec: 600000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4263857227869763e-06 longitude_deg: -8.0997367347435748e-06 altitude: 20.958831951953471 velocity_east: -0.0064765043007881376 velocity_north: 0.0076519004378160452 velocity_up: -0.033514086003998168 time { sec: 5206 nsec: 800000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4205381481821041e-06 longitude_deg: -8.114123401948635e-06 altitude: 20.954045912250876 velocity_east: -0.0096772272248651318 velocity_north: -0.0012674915998885131 velocity_up: -0.017786372762228858 time { sec: 5207 nsec: 0 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4309173571265127e-06 longitude_deg: -8.13402138663806e-06 altitude: 20.950159355998039 velocity_east: -0.011961145916546649 velocity_north: -0.0095852711307301761 velocity_up: -0.025342314157376228 time { sec: 5207 nsec: 200000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4519823130523982e-06 longitude_deg: -8.1555908382890325e-06 altitude: 20.942453072406352 velocity_east: -0.011399544148833641 velocity_north: -0.012656908303145411 velocity_up: -0.051105507815038427 time { sec: 5207 nsec: 400000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4771499703750814e-06 longitude_deg: -8.17306133168418e-06 altitude: 20.930765697732568 velocity_east: -0.0081463581387440729 velocity_north: -0.01625191237728766 velocity_up: -0.054660789923046446 time { sec: 5207 nsec: 600000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.5137210585576305e-06 longitude_deg: -8.189130765359672e-06 altitude: 20.922167201526463 velocity_east: -0.011325751538111934 velocity_north: -0.023812409686585705 velocity_up: -0.035000133967963913 time { sec: 5207 nsec: 800000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.5623360600389142e-06 longitude_deg: -8.2156165213313913e-06 altitude: 20.914503942243755 velocity_east: -0.017165060266171105 velocity_north: -0.029491893881218659 velocity_up: -0.045721487981602388 time { sec: 5208 nsec: 0 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.6179932252596015e-06 longitude_deg: -8.2454542642759144e-06 altitude: 20.903589533641934 velocity_east: -0.015005264062594741 velocity_north: -0.030936998989148992 velocity_up: -0.063867407905587342 time { sec: 5208 nsec: 200000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.6711078160365384e-06 longitude_deg: -8.2693231056106074e-06 altitude: 20.890134408138692 velocity_east: -0.012109170323674366 velocity_north: -0.027940003604763453 velocity_up: -0.057342687350434116 time { sec: 5208 nsec: 400000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.7202299626737322e-06 longitude_deg: -8.2900878427818057e-06 altitude: 20.882502269931138 velocity_east: -0.010841424041424621 velocity_north: -0.026452180041652139 velocity_up: -0.026357105140536331 time { sec: 5208 nsec: 600000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.7652733709128169e-06 longitude_deg: -8.3080433416888439e-06 altitude: 20.877778694964945 velocity_east: -0.00944769266055363 velocity_north: -0.023288046186138157 velocity_up: -0.014516012694954387and but when it comes to the received mavlink messages:
this is the closest I have to diff_pressure
-
@Eric-Katzfey gazebo evidently is not publishing diff_pressure but I am confused as to why. from what I have seen online, usually it just works out of the box for people when they build the world. i even checked all the .sdf models in the gazebo classic repo and all the mavlink plugins for fixed wing and for quads are identical. where would this be configured ?
all I see in gazebo is the airspeed topic like such:
gz topic -d 4 -e /gazebo/standard_vtol_hitl_world/standard_vtol_hitl/airspeed/link/airspeed time { sec: 5204 nsec: 800000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.6875033675151349e-06 longitude_deg: -8.0985729541323173e-06 altitude: 21.067402929998934 velocity_east: 0.0041351439189235657 velocity_north: 0.014366458095080673 velocity_up: -0.077853461599531493 time { sec: 5205 nsec: 0 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.65648519834101e-06 longitude_deg: -8.0864227239372417e-06 altitude: 21.051106543280184 velocity_east: 0.0091959411425546929 velocity_north: 0.01927891127394361 velocity_up: -0.07690062638957737 time { sec: 5205 nsec: 200000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.6218446606961743e-06 longitude_deg: -8.0702784253073972e-06 altitude: 21.037869208492339 velocity_east: 0.0070925229066759387 velocity_north: 0.018342345861654636 velocity_up: -0.059754401868207442 time { sec: 5205 nsec: 400000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.5894898632271678e-06 longitude_deg: -8.06327351450745e-06 altitude: 21.026238181628287 velocity_east: 0.0012297001505018705 velocity_north: 0.018024321587302515 velocity_up: -0.052280255081160854 time { sec: 5205 nsec: 600000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.5569699380192946e-06 longitude_deg: -8.06390211416581e-06 altitude: 21.017491457983851 velocity_east: -0.001618067383164185 velocity_north: 0.017209061152664136 velocity_up: -0.039400112952817 time { sec: 5205 nsec: 800000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.5292924599121225e-06 longitude_deg: -8.0691216897048133e-06 altitude: 21.008538438007236 velocity_east: -0.0040763711507462008 velocity_north: 0.013864325720556073 velocity_up: -0.0538369387758966 time { sec: 5206 nsec: 0 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.5047486190666175e-06 longitude_deg: -8.0773220885855787e-06 altitude: 20.995235768146813 velocity_east: -0.0045764253450751866 velocity_north: 0.013940962132516522 velocity_up: -0.077954621888091963 time { sec: 5206 nsec: 200000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4757025411756733e-06 longitude_deg: -8.08466180642776e-06 altitude: 20.978572748601437 velocity_east: -0.0033555745179364043 velocity_north: 0.017347668957779176 velocity_up: -0.073148434894389075 time { sec: 5206 nsec: 400000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4462882142533986e-06 longitude_deg: -8.0904497539150887e-06 altitude: 20.967332033440471 velocity_east: -0.0037972556503345928 velocity_north: 0.014495664657131601 velocity_up: -0.046656718127848877 time { sec: 5206 nsec: 600000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4263857227869763e-06 longitude_deg: -8.0997367347435748e-06 altitude: 20.958831951953471 velocity_east: -0.0064765043007881376 velocity_north: 0.0076519004378160452 velocity_up: -0.033514086003998168 time { sec: 5206 nsec: 800000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4205381481821041e-06 longitude_deg: -8.114123401948635e-06 altitude: 20.954045912250876 velocity_east: -0.0096772272248651318 velocity_north: -0.0012674915998885131 velocity_up: -0.017786372762228858 time { sec: 5207 nsec: 0 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4309173571265127e-06 longitude_deg: -8.13402138663806e-06 altitude: 20.950159355998039 velocity_east: -0.011961145916546649 velocity_north: -0.0095852711307301761 velocity_up: -0.025342314157376228 time { sec: 5207 nsec: 200000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4519823130523982e-06 longitude_deg: -8.1555908382890325e-06 altitude: 20.942453072406352 velocity_east: -0.011399544148833641 velocity_north: -0.012656908303145411 velocity_up: -0.051105507815038427 time { sec: 5207 nsec: 400000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.4771499703750814e-06 longitude_deg: -8.17306133168418e-06 altitude: 20.930765697732568 velocity_east: -0.0081463581387440729 velocity_north: -0.01625191237728766 velocity_up: -0.054660789923046446 time { sec: 5207 nsec: 600000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.5137210585576305e-06 longitude_deg: -8.189130765359672e-06 altitude: 20.922167201526463 velocity_east: -0.011325751538111934 velocity_north: -0.023812409686585705 velocity_up: -0.035000133967963913 time { sec: 5207 nsec: 800000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.5623360600389142e-06 longitude_deg: -8.2156165213313913e-06 altitude: 20.914503942243755 velocity_east: -0.017165060266171105 velocity_north: -0.029491893881218659 velocity_up: -0.045721487981602388 time { sec: 5208 nsec: 0 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.6179932252596015e-06 longitude_deg: -8.2454542642759144e-06 altitude: 20.903589533641934 velocity_east: -0.015005264062594741 velocity_north: -0.030936998989148992 velocity_up: -0.063867407905587342 time { sec: 5208 nsec: 200000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.6711078160365384e-06 longitude_deg: -8.2693231056106074e-06 altitude: 20.890134408138692 velocity_east: -0.012109170323674366 velocity_north: -0.027940003604763453 velocity_up: -0.057342687350434116 time { sec: 5208 nsec: 400000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.7202299626737322e-06 longitude_deg: -8.2900878427818057e-06 altitude: 20.882502269931138 velocity_east: -0.010841424041424621 velocity_north: -0.026452180041652139 velocity_up: -0.026357105140536331 time { sec: 5208 nsec: 600000000 } link_name: "standard_vtol_hitl::airspeed::link" latitude_deg: -6.7652733709128169e-06 longitude_deg: -8.3080433416888439e-06 altitude: 20.877778694964945 velocity_east: -0.00944769266055363 velocity_north: -0.023288046186138157 velocity_up: -0.014516012694954387and but when it comes to the received mavlink messages:
this is the closest I have to diff_pressure
@garret Here's the source code for our branch of Gazebo: https://github.com/modalai/PX4-SITL_gazebo-classic/tree/voxl-dev

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login