VOXL2 HITL Sim with Gazebo in Docker - gazebo/voxl2 communication
-
Good afternoon,
I am a new user trying to setup a HITL simulation with gazebo for a standard VTOL. I did the bootcamp from the documentation and then followed VOXL PX4 steps from here: https://docs.modalai.com/voxl-px4/
In short, I get the following when run qshell dsp-hitl status
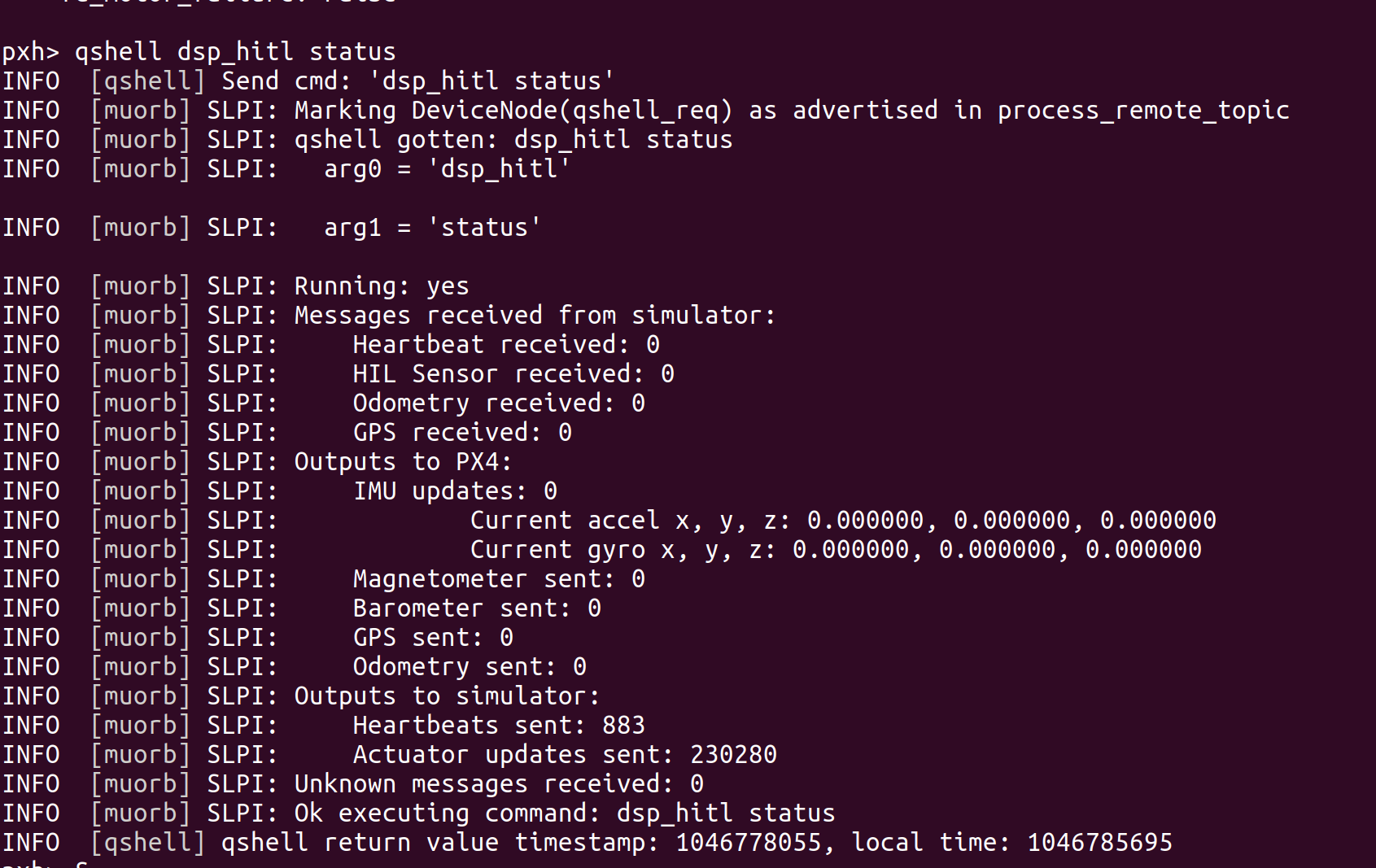
As far as I understand, my J18 port is not receiving data from gazebo. I am using out of the box MCBL-00091-1 USB to Serial UART Cable from ModalAI, so I hope the chord is not an issue.
Some of the troubleshooting that I have done:
- checking output from:
xhost +
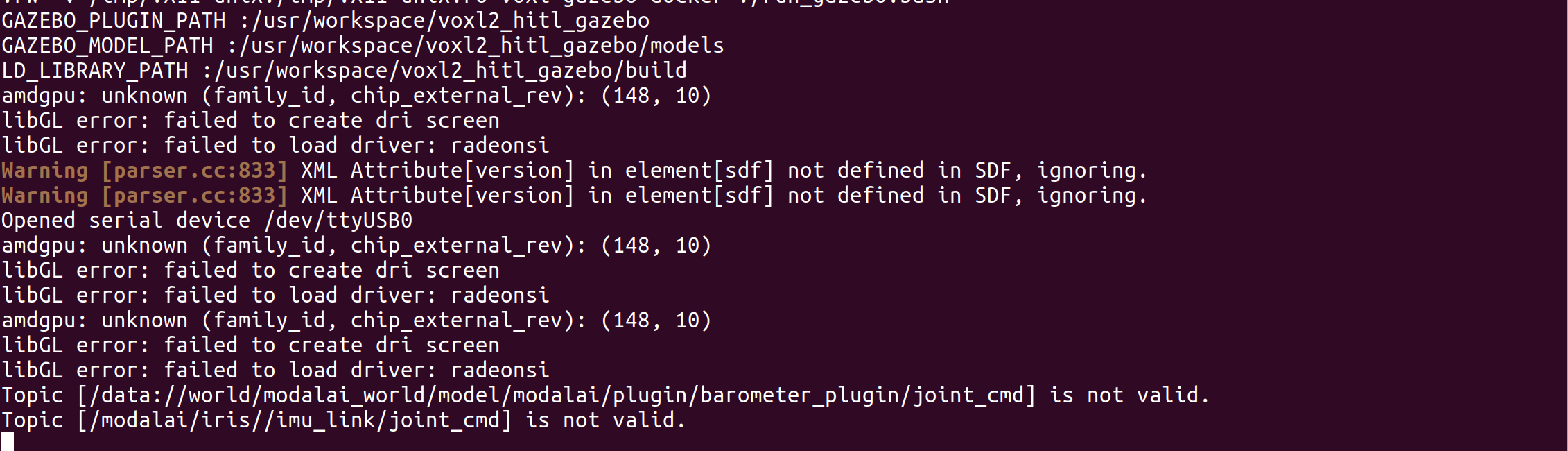
docker run --rm -it --net=host --privileged -e DISPLAY=$DISPLAY -v /dev/input:/dev/input:rw -v /tmp/.X11-unix:/tmp/.X11-unix:ro voxl-gazebo-docker ./run_gazebo.bash
Since my /ttyUSB0 is recognized, I assume gazebo is trying to send the data to the voxl2 board.
- As for my services, I have the following:
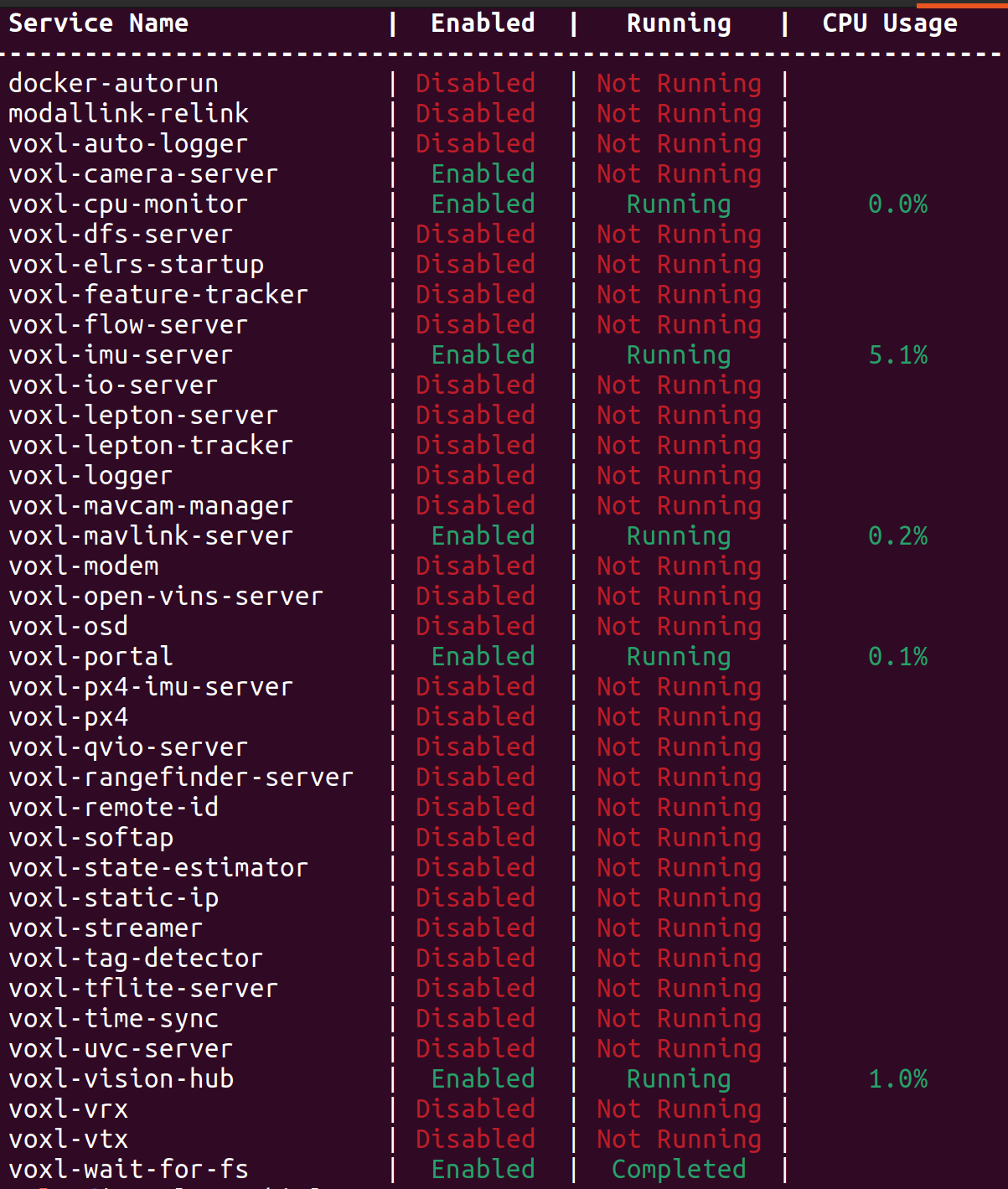
px4 and qvio are disabled by default and mavlink is running.
- trying to adjust latency via:
echo 1 | sudo tee /sys/bus/usb-serial/devices/ttyUSB0/latency_timer
===================================
none of the above produced favorable outcome. I was thinking of trying to set this up via old method in "Archivede instructions" from here: https://docs.modalai.com/voxl2-PX4-hitl/. however, i am using ubuntu 22.04 and as far as I understand gazebo classic is no longer supported on this version. hence, my only option is to use the docker. if anyone has any idea how I can troubleshoot further - it would be much appreciated. - checking output from:
-
Good afternoon,
I am a new user trying to setup a HITL simulation with gazebo for a standard VTOL. I did the bootcamp from the documentation and then followed VOXL PX4 steps from here: https://docs.modalai.com/voxl-px4/
In short, I get the following when run qshell dsp-hitl status
As far as I understand, my J18 port is not receiving data from gazebo. I am using out of the box MCBL-00091-1 USB to Serial UART Cable from ModalAI, so I hope the chord is not an issue.
Some of the troubleshooting that I have done:
- checking output from:
xhost +
docker run --rm -it --net=host --privileged -e DISPLAY=$DISPLAY -v /dev/input:/dev/input:rw -v /tmp/.X11-unix:/tmp/.X11-unix:ro voxl-gazebo-docker ./run_gazebo.bash
Since my /ttyUSB0 is recognized, I assume gazebo is trying to send the data to the voxl2 board.
- As for my services, I have the following:
px4 and qvio are disabled by default and mavlink is running.
- trying to adjust latency via:
echo 1 | sudo tee /sys/bus/usb-serial/devices/ttyUSB0/latency_timer
===================================
none of the above produced favorable outcome. I was thinking of trying to set this up via old method in "Archivede instructions" from here: https://docs.modalai.com/voxl2-PX4-hitl/. however, i am using ubuntu 22.04 and as far as I understand gazebo classic is no longer supported on this version. hence, my only option is to use the docker. if anyone has any idea how I can troubleshoot further - it would be much appreciated. - checking output from:
-
@garret I use the Sparkfun CAB-12977 and CAB-17240 for HITL and it works really well.
-
@garret I use the Sparkfun CAB-12977 and CAB-17240 for HITL and it works really well.
@Eric-Katzfey so you suspect it is a cable issue?
-
@Eric-Katzfey so you suspect it is a cable issue?
@garret Very likely. But you also have some errors on gazebo launch that I have never seen before so that could be part of the problem as well.
-
@garret Very likely. But you also have some errors on gazebo launch that I have never seen before so that could be part of the problem as well.
@Eric-Katzfey are you referring to libgl errors?
-
RESOLVED
for those who come after:
it was indeed an ftdi cable issue. Keep in mind that MCBL-00091-1 USB to Serial UART Cable is not a proper cable (i tried two freshly out of the box, and none worked). Currently using this cable: https://www.amazon.sa/-/en/Moyina-Converter-Terminated-BeagleBone-Minnowboard/dp/B06ZYPLFNB


Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login