Obstacle_Detection messages not appearing
-
Hello, I am trying to figure out how to turn on the collision prevention in voxl based systems, and despite following the linked instructions, I am unable to get Obstacle_Detection messages to appear in the QGC mavlink inspector. I enabled voa and voa messages to qgc, and configured the PX4 parameters using the given helper file. What should I try to receive Obstacle Detection messages?

Page not found
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
-
I also calibrated the Stereo cameras and confirmed that output was coming out from the voxl-vision-px4 debug mode (-s flag)
-
-
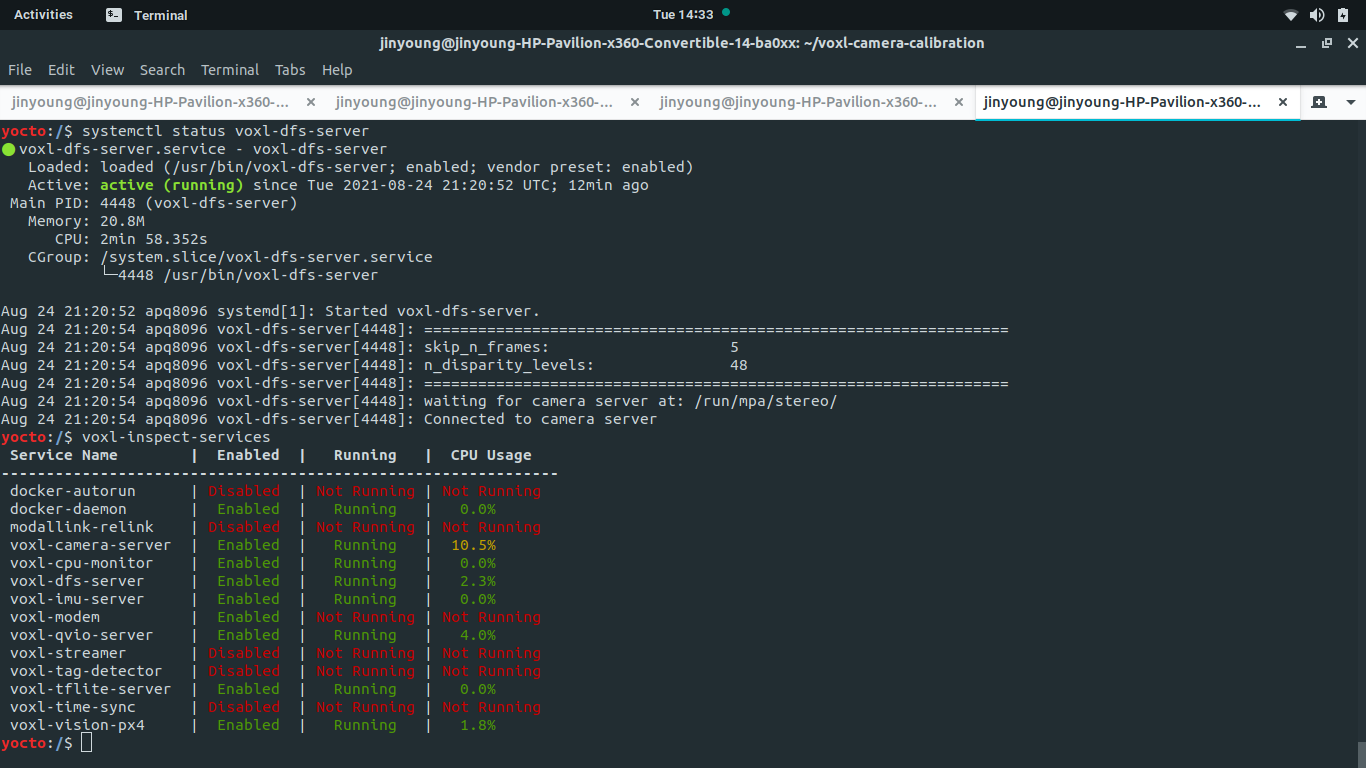
It looks like everything is set up properly, can you run
voxl-inspect-cam dfs-disparityand check to see that you're getting output there? -
It looks like everything is set up properly, can you run
voxl-inspect-cam dfs-disparityand check to see that you're getting output there?@Alex-Gardner Doesn't seem like it, its stuck on this screen.

-
can you do the same but with stereo:
voxl-inspect-cam stereo, if the dfs service is running and receiving frames it should be outputting data -
can you do the same but with stereo:
voxl-inspect-cam stereo, if the dfs service is running and receiving frames it should be outputting data@Alex-Gardner I'm getting output just fine from stereo alone

-
What version of voxl suite/system image do you have?
voxl-versionshould print this out -
What version of voxl suite/system image do you have?
voxl-versionshould print this out@Alex-Gardner System image 3.3.0. Voxl-suite 0.4.6
-
do you see dfs topics when you do
ls /run/mpa -
wait the name is dfs_disparity, not dfs-disparity, what does the inspect cam say with that
voxl-inspect-cam dfs_disparity -
wait the name is dfs_disparity, not dfs-disparity, what does the inspect cam say with that
voxl-inspect-cam dfs_disparity@Alex-Gardner Output is generated for dfs_disparity

-
-
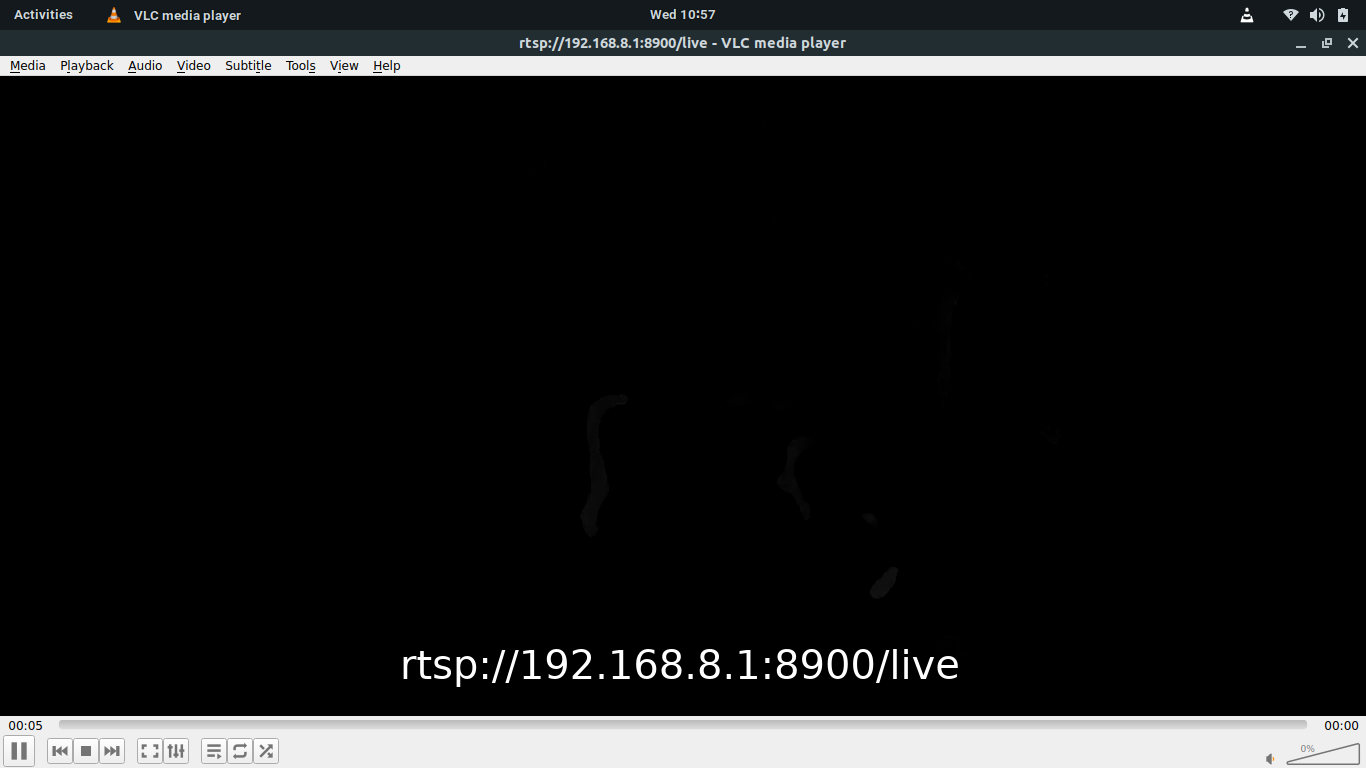
The image is showing some disparity data there, the image is often very dark because it will be black if the dfs algo is unable to match regions and we do a lot of filtering to get rid of noise, but you can see 2 blobs there that it recognizes. If you're shoing the stereo cameras a blank wall or a repeating pattern it will be unable to properly match data.
-
The image is showing some disparity data there, the image is often very dark because it will be black if the dfs algo is unable to match regions and we do a lot of filtering to get rid of noise, but you can see 2 blobs there that it recognizes. If you're shoing the stereo cameras a blank wall or a repeating pattern it will be unable to properly match data.
@Alex-Gardner That's good to know! How can I get the Obstacle Detection message to be sent to the QGC?
-
the file at /etc/modalai/voxl-vision-px4.conf has settings for QGC IP, enabling VOA, and sending VOA to QGC. Make sure that the latter two are enabled and that your qgc ip is correct and it should send to QGC
-
the file at /etc/modalai/voxl-vision-px4.conf has settings for QGC IP, enabling VOA, and sending VOA to QGC. Make sure that the latter two are enabled and that your qgc ip is correct and it should send to QGC
@Alex-Gardner That was it, the ip address was not inputted correctly. Thanks!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login