ros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_node stopped by ros2 bag record /hires_small_encoded
-
Hi
I'm recording with the ros2 bag record the topics I get from running
rb5:~$ ros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_nodeOn a different terminal I run
rb5:~/ROS2_recordings$ ros2 bag record /hires_small_encodedthen on the first terminal, I get
rb5:~$ ros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_node
Found new interface: hires_large_color
Found new interface: hires_large_encoded
Found new interface: hires_large_grey
Found new interface: hires_small_color
Found new interface: hires_small_encoded
Found new interface: hires_small_grey
Found new interface: hires_snapshot
Found new interface: qvio_overlay
Found new interface: stereo_front
Found new interface: stereo_rear
Found new interface: tracking
Found new interface: imu_px4
Found new interface: voa_pc_out
Found new interface: vvhub_body_wrt_fixed
Found new interface: vvhub_body_wrt_local
Found new interface: qvio
Interface hires_small_encoded now publishing
terminate called after throwing an instance of 'std::bad_alloc'
what(): std::bad_alloc
rb5:~$Any help on this?
-
@tahawaru I have also seen this, but with subscribing to the topic in rviz2 rather than recording a ros2 bag.
@nuallaino that looks like a bug in the interface listing. The encoded interfaces are h264 which voxl-mpa-to-ros2 doesn't look like it supports
-
@tahawaru @nuallaino what happens when you build from source dev branch push the deb and then rerun the ros2 code base?
I assuming you are sourcing the right directory via
voxl2:~$ source /opt/ros/foxy/mpa_to_ros2/install/setup.bashin both terminal windows prior to running the code base etc?I am currently unable to reproduce your error and am testing on multiple voxl2's. What is the output of
voxl-inspect-cam -a? Does it show the encoded frames working as expected? I have tried with both h264 and h265 on the voxl2 so far and have had no luck reproducing your error. I see you are on an rb5 flight though is that correct? -
@tahawaru @nuallaino what happens when you build from source dev branch push the deb and then rerun the ros2 code base?
I assuming you are sourcing the right directory via
voxl2:~$ source /opt/ros/foxy/mpa_to_ros2/install/setup.bashin both terminal windows prior to running the code base etc?I am currently unable to reproduce your error and am testing on multiple voxl2's. What is the output of
voxl-inspect-cam -a? Does it show the encoded frames working as expected? I have tried with both h264 and h265 on the voxl2 so far and have had no luck reproducing your error. I see you are on an rb5 flight though is that correct?I have the following on my .bashrc :
export ROS_HOME=/opt/ros/foxy
source /opt/ros/foxy/local_setup.bash
source /opt/ros/foxy/mpa_to_ros2/install/setup.bash
source /opt/ros/foxy/setup.bashAnd the voxl-inspect-cam -a is as follows:
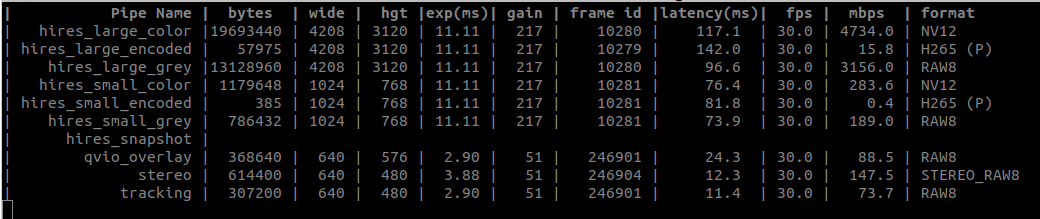
-
@tahawaru I cannot say that I have tested this on an original rb5 board - just a voxl1 and voxl2 - works as expected on both. Have you build from source on the dev branch and installed that?
-
@tahawaru I cannot say that I have tested this on an original rb5 board - just a voxl1 and voxl2 - works as expected on both. Have you build from source on the dev branch and installed that?
I used the docker to build the ROS2 package following the instructions here roughly 2 months ago:
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-mpa-to-ros2*****voxl-mpa-to-ros2$ docker load -i qrb5165-emulator-v1.5.tar.gz
voxl-mpa-to-ros2$ docker tag qrb5165-emulator:1.5 qrb5165-emulator:latest
voxl-mpa-to-ros2$ voxl-docker -i qrb5165-emulator
qrb5165-emulator:~(master)(0.0.4)$ ./install_build_deps.sh qrb5165 dev
qrb5165-emulator:~(master)(0.0.4)$ ./build.sh qrb5165
qrb5165-emulator:~(master)(0.0.4)$ ./make_package.sh*****
I installed the build on the rb5:
*****rb5:/$ cd home/root/
rb5:~$ dpkg -i voxl-mpa-to-ros2_0.0.4_arm64.deb
rb5:~$ voxl-configure-mpa-to-ros2
rb5:~$ source /opt/ros/foxy/mpa_to_ros2/install/setup.bash
rb5:~$ ros2 topic list
rb5:~$ source /opt/ros/foxy/setup.bash
rb5:~$ ros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_node*****
---------------------------------After restart of the RB5
rb5:~$ ros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_node
Found new interface: hires_large_color
Found new interface: hires_large_encoded
Found new interface: hires_large_grey
Found new interface: hires_small_color
Found new interface: hires_small_encoded
Found new interface: hires_small_grey
Found new interface: hires_snapshot
Found new interface: qvio_overlay
Found new interface: stereo
Found new interface: tracking
Found new interface: imu_px4
Found new interface: voa_pc_out
Found new interface: vvhub_body_wrt_fixed
Found new interface: vvhub_body_wrt_local
Found new interface: qvio
-
@tahawaru please pull down the latest dev branch: https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-mpa-to-ros2/-/tree/dev?ref_type=heads
You can rebuild with the dev branch and see if you can both ros2 topic echo and rosbag record the encoded images. Please be aware that you will need to manually decode the images somehow on the receiving end (your application) as there isn't a built-in way in ros2/rviz to decode.
-
@tahawaru also since you are running an RB5 and not a voxl2, the most recent SDK you are running is 1.1.3 which might have dependencies in modal-pipe or modal-json that are not transferable to the newest dev branch of voxl-mpa-to-ros2 causing some form of error somewhere in the pipeline.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login