VOXL VIO not sending position over Odometry Message
-
I switched into system image 3.3 as so here: https://forum.modalai.com/topic/382/collision-prevention because I want to be able to use VIO and collision avoidance. However, after doing so, I am no longer able to get VIO updates to x and y in the Odometry message on QGC.
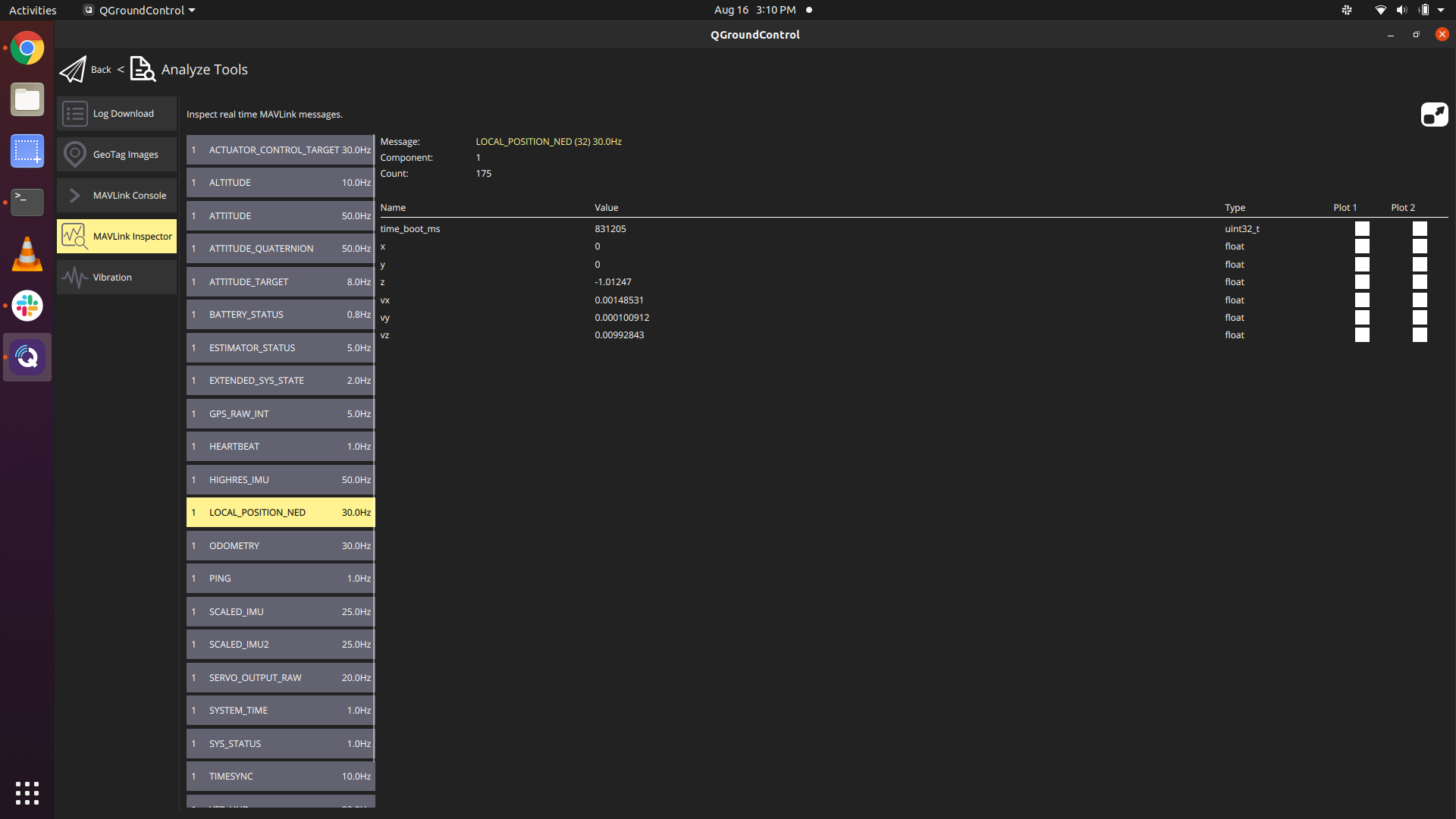
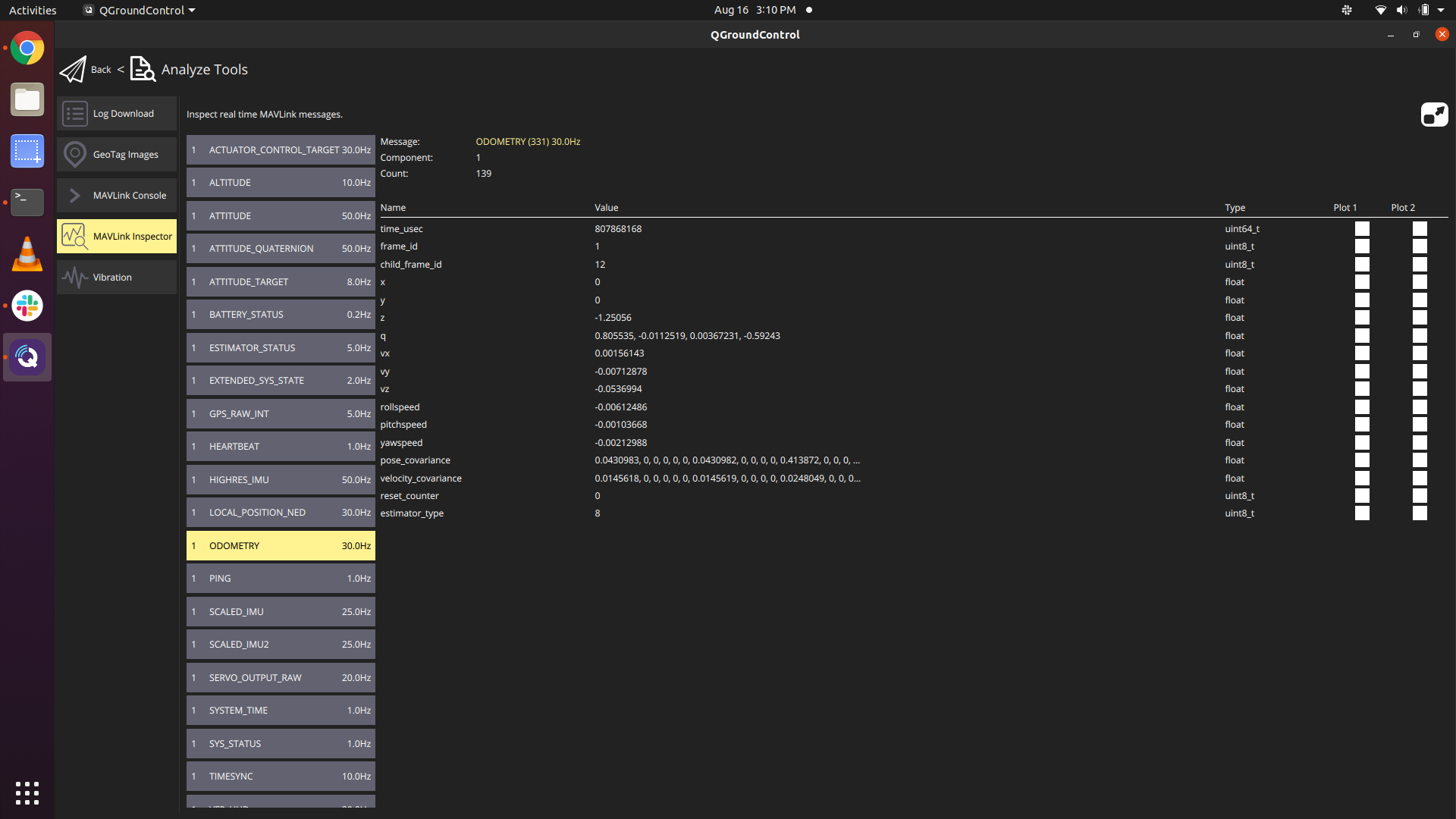
Previously I was able to receive changes to Odometry in version 3.2, it is only now that I can't receive those changes.
-
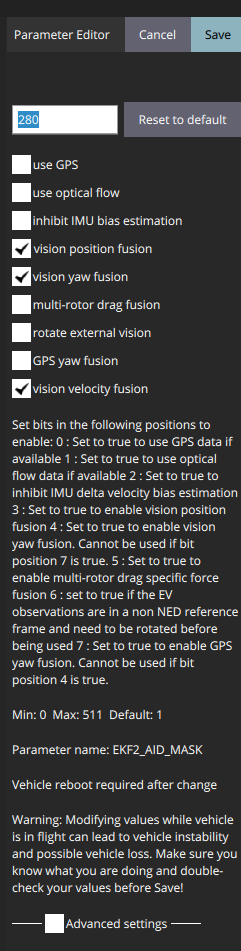
In your px4 parameters, what is EKF2_AID_MASK? If you're trying to run in vio mode, you need to set the aid mask to 280 (vision position fusion + vision yaw fusion + vision velocity fusion)
-
In your px4 parameters, what is EKF2_AID_MASK? If you're trying to run in vio mode, you need to set the aid mask to 280 (vision position fusion + vision yaw fusion + vision velocity fusion)
@Alex-Gardner Also 280. I loaded in the configuration file here https://gitlab.com/voxl-public/flight-core-px4/px4-parameters/-/blob/master/helpers/ekf2_indoor_vio.params
-
@Alex-Gardner
Found the solution. Here are the steps to make sure VIO is working properly.
-
Make sure VIO is enabled in the voxl-vision-px4.conf file
-
Make sure PX4 parameters are updated
-
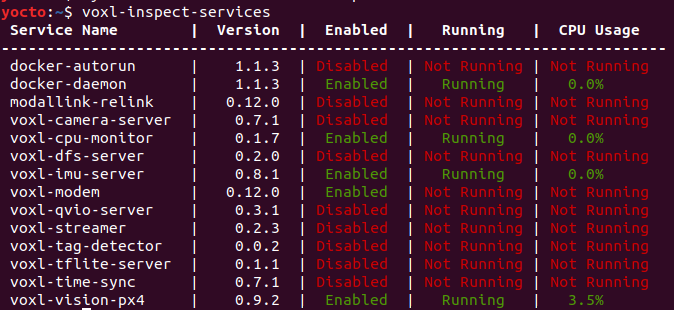
Ensure voxl-camera-server, voxl-qvio-server, and voxl-vision-px4 services are all running in the background
If you could add step 2 into the documentation it would help a lot. As is, I had to do a lot of forum searching to figure this out. https://forum.modalai.com/topic/140/vio-indoor-navigation
-
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login