voxl-mpa-to-ros node crashes when /uvc topic is echoed (VOXL2, version 1.1)
-
Hey there,
I have a Sentinel drone equipped with a VOXL2 onboard (running Ubuntu 18 + ROS Melodic). I also have a FLIR Lepton 3.5 thermal camera plugged into the VOXL2 via a USB connection. I can RTSP stream the Lepton's camera data from the VOXL2 to QGroundControl on my laptop when I run the voxl-uvc-server (with the proper parameters), but when I run the voxl_mpa_to_ros node and echo or subscribe to the /uvc topic to get the camera data, the ros node crashes with this error:
terminate called after throwing an instance of 'std::bad_alloc'
what(): std::bad_alloc
[voxl_mpa_to_ros_node-2] process has died [pid 2409, exit code -6, cmd /opt/ros/melodic/lib/voxl_mpa_to_ros/voxl_mpa_to_ros_node __name:=voxl_mpa_to_ros_node __log:=/home/root/.ros/log/5567d258-c2e7-11ee-a3cf-00c0cab38e43/voxl_mpa_to_ros_node-2.log].
log file: /home/root/.ros/log/5567d258-c2e7-11ee-a3cf-00c0cab38e43/voxl_mpa_to_ros_node-2*.log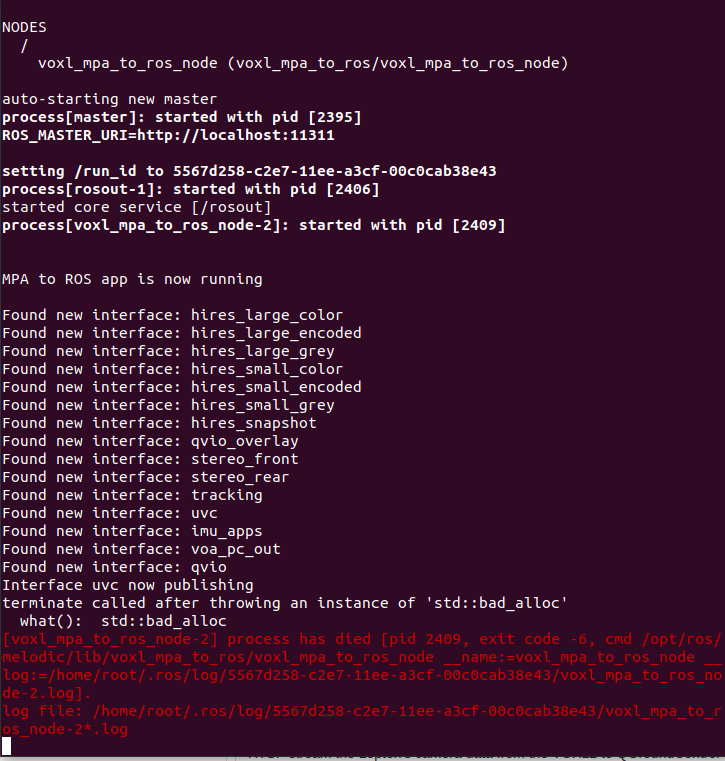
-
Hi @Isaac-Stephan-Remy that tends to happen when the conversion from the frame in MPA to the ros1 or 2 image is not allocated the proper amount of size. I will do some testing with a FLIR thermal camera over UVC and get back with a fix for a PR - you will need to most likely build from source for ros1.
Also I do recommend swapping over to ROS2 FOXY on the voxl2 as it is more supported and ROS1 is at EOL.
Zach
-
Hi @Isaac-Stephan-Remy that tends to happen when the conversion from the frame in MPA to the ros1 or 2 image is not allocated the proper amount of size. I will do some testing with a FLIR thermal camera over UVC and get back with a fix for a PR - you will need to most likely build from source for ros1.
Also I do recommend swapping over to ROS2 FOXY on the voxl2 as it is more supported and ROS1 is at EOL.
Zach
Hi @Zachary-Lowell-0,
Thanks for the support! Will the PR be available over GitHub? I will look into ROS2 in the meantime. -
Yes it will be available on the gitlab under a new branch most likely by EOD tomorrow. I wll post the branch that you can build from source - once approved it iwll be merged into the next stable release, etc.
-
@Isaac-Stephan-Remy please pull down the most recent iteration of https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-mpa-to-ros2/-/tree/dev and build within the qrb5165 docker image and deploy the deb. This will allow you to convert UVC 422/UYVY images from the MPA to ros2. In the meantime I am working on the fix for ros1 as well.
Zach
-
I Isaac Stephan Remy referenced this topic on
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login