Autotune Feature in PX4 1.14-dev Version for Sentinel Drone (VOXL2 Board)
-
@dlee I'm not familiar with the 1.14-dev version. For VOXL2 you would want to use the voxl-dev branch in our GitHub repo. We have tried autotune with that branch and a much smaller drone and the autotune procedure ran but failed to produce valid gains. We have not yet spent the time to figure out why that happened.
-
@Eric-Katzfey
I changed it to the voxl-dev repository and built it, then did depackaging on voxl2. However, I still can't see autotune. Is there any other method?
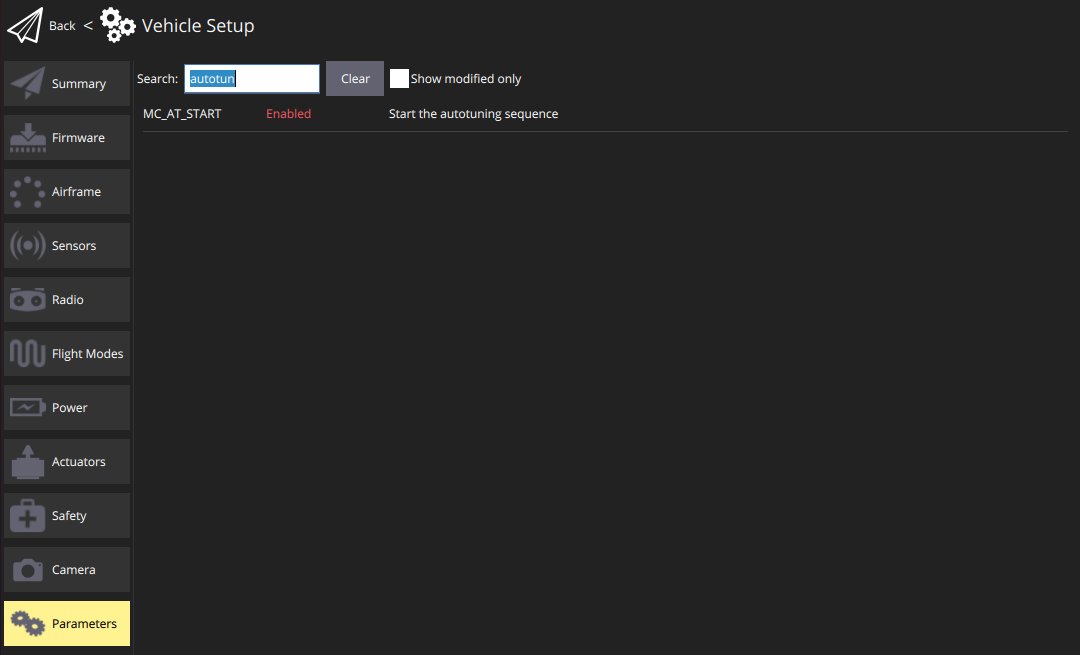
@dlee We tested by running voxl-px4 on target manually and then set MC_AT_START to 1 when the drone was flying. I would expect that if you have it disabled and are flying that when you set it to enabled the procedure would start. Is that not what you are experiencing?
-
@dlee We tested by running voxl-px4 on target manually and then set MC_AT_START to 1 when the drone was flying. I would expect that if you have it disabled and are flying that when you set it to enabled the procedure would start. Is that not what you are experiencing?
-
@Eric-Katzfey
When I do arm, I encounter this error on QGC. Do you know this?"MAV_CMD_COMPONENT_ARM_DISARM command temporaily rejected"
Because of this error, I cannot fly the drone.
@dlee That's kind of generic. There should also be a more specific preflight failure that tells you exactly what the issue is.
-
@dlee That's kind of generic. There should also be a more specific preflight failure that tells you exactly what the issue is.
-
@Eric-Katzfey I got this message: "preflight fail : open drone id system missing".
@dlee You can set the parameter COM_ARM_ODID to 0 to ignore those.
-
@dlee You can set the parameter COM_ARM_ODID to 0 to ignore those.
-
@Eric-Katzfey
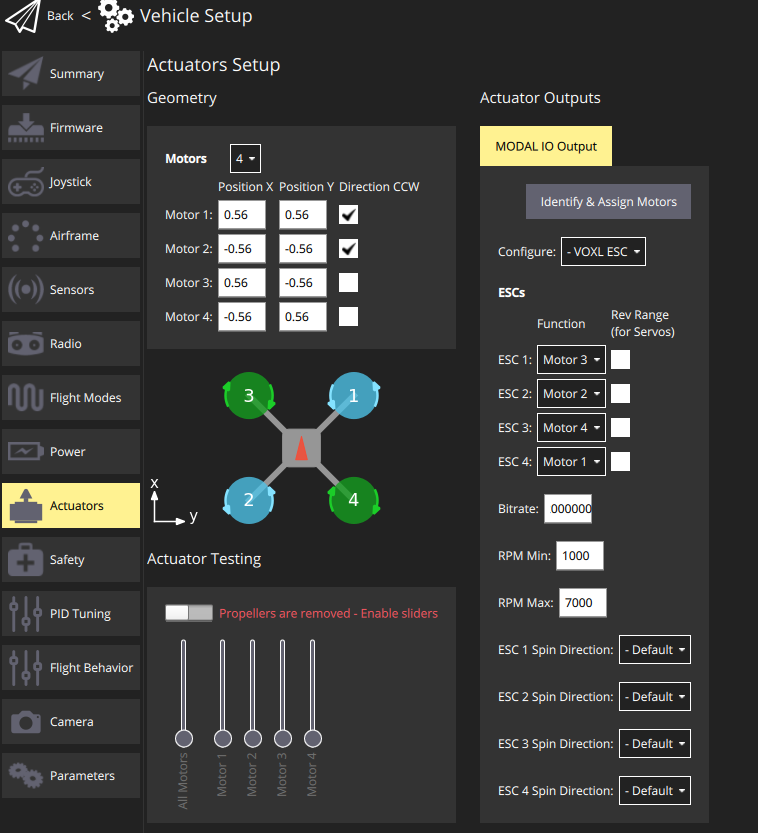
Could you see this video? When I put parameters downloaded from gitlab (Sentinel_V1.params-link), ESCs error occurs.This capture is the menu of Actuators. Actuator testing doesn't work too.
@dlee It's likely that moving to the newer version of PX4 resulted in some incompatibilities in parameters or something else. Rather than try to resolve with your current software would you be willing to try our latest software platform release (currently in beta)? If you are interested I can send you a link to the new platform release via email.
-
@dlee It's likely that moving to the newer version of PX4 resulted in some incompatibilities in parameters or something else. Rather than try to resolve with your current software would you be willing to try our latest software platform release (currently in beta)? If you are interested I can send you a link to the new platform release via email.
-
@dlee Sent!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login