M500 Altitude Issues
-
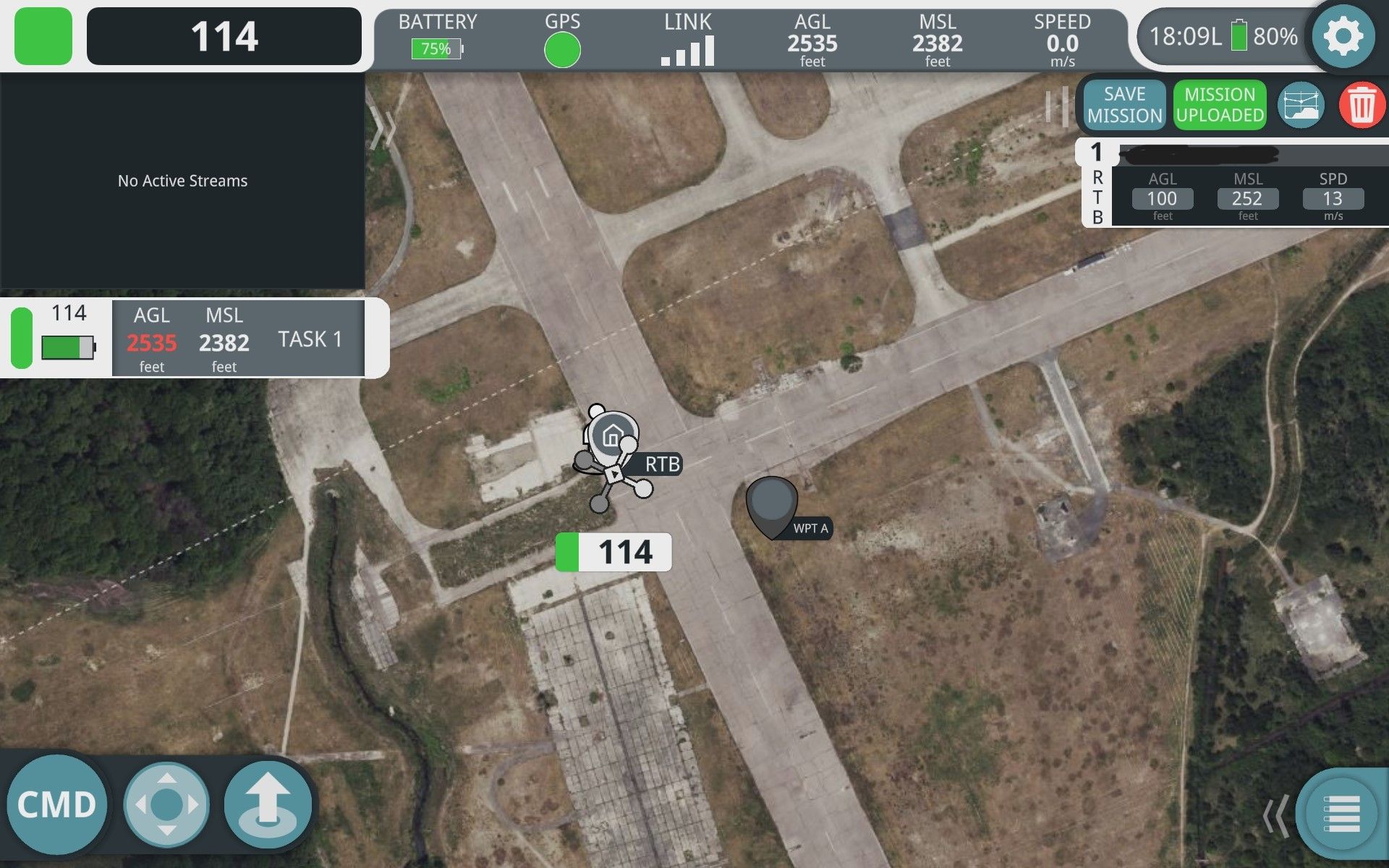
Several of our m500 vehicles are experiencing issues with their altitude. Many times on the ground they will report altitudes of over 2,500 feet AGL or below -500 feet AGL. The vehicle is unable to launch while experiencing these huge variances in altitude. It sometimes will sort itself out, sometimes it requires a few power cycles. What could be causing these altitude readouts to be so far from truth? (attached is a screenshot from our gcs software showing the altitude)
In addition to these altitude issues, 3 out of 5 of the m500 vehicles we have flight tested are experiencing mid air altitude issues. They will constantly ascend and descend for no apparent reason. Let me know if there is a fix or explanation for this. Thanks.
-
Can you disable VIO and test again?
-
Chiming in because since I'm on OPs' team. Do you mean completely disable it through voxl-vision-px4? It was disable from the FCU side in terms of the EKF aid mask was not using the VIO inputs (EKF2_AID_MASK = 1.) Will the VIO messages continue to affect the vehicles state estimation even if the EKF should not be reading in those measurements?
-
No, if you have disabled in EKF then it seems like the FC should ignore.
Then, this error doesn't seem right. Have you logged the barometer and PX4 EKF data? We've not heard of anyone having this issue before.
Also, are you using the ModalAI firmware?
-
No, if you have disabled in EKF then it seems like the FC should ignore.
Then, this error doesn't seem right. Have you logged the barometer and PX4 EKF data? We've not heard of anyone having this issue before.
Also, are you using the ModalAI firmware?
@Chad-Sweet We are using the ModalAI firmware. We can get you some logs for you to look into.
We have seen this issue so far on 5 of the m500 platforms that we've received in the last 3 months with varying levels of consistency (sometime altitude is correct right away, sometimes it takes some time, sometimes it figures itself out on takeoff.) We will be testing 20 more m500 vehicles in the coming week and I will let you know if they have the same issues.
-
Is it preventing you from arming? There was some thoughts px4 should correct the altitude on takeoff
-
Is it preventing you from arming? There was some thoughts px4 should correct the altitude on takeoff
@Chad-Sweet The bad altitude reading will sometimes prevent us from arming - but it also effects the M500s in the air. During a loiter at a specified hold point, one of the M500s was bobbing up/down about ±50ft - another instance resulted in an M500 experiencing CFIT because it thought it was at an altitude higher than what it was
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login