Hi Modal AI team,
I am trying to use the mavros on board to sort out the time sync problems of mocap system. Now I am following the guidence from videos in documentations(https://docs.modalai.com/ros-installation-voxl2/, https://docs.modalai.com/mavros/).
But when I do the fastboot of the RB5 Platform 1.3.1-0.8 and load the parameters from here(https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.12/RB5_Flight/RB5_Flight_V1_param_ModalAIMotors_3s_rev_A.params?ref_type=heads, https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.12/ekf2_indoor_vio.params?ref_type=heads, https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.12/spektrum_dx6e_config.params?ref_type=heads), I find the drone did not work properly with doing the simple test mavros script.
Here is the output before the switch the mode from RC controller:
rb5:/home/mavros_test(simple-example)$ ./run_mavros_test.sh
... logging to /home/root/.ros/log/68e03f2e-4ba7-11f0-98f1-00037f1247d0/roslaunch-m0052-3747.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.1.121:43719/
SUMMARY
========
CLEAR PARAMETERS
* /mavros/
PARAMETERS
* /mavros/camera/frame_id: base_link
* /mavros/cmd/use_comp_id_system_control: False
* /mavros/conn/heartbeat_rate: 1.0
* /mavros/conn/system_time_rate: 1.0
* /mavros/conn/timeout: 10.0
* /mavros/conn/timesync_rate: 10.0
* /mavros/distance_sensor/hrlv_ez4_pub/field_of_view: 0.0
* /mavros/distance_sensor/hrlv_ez4_pub/frame_id: hrlv_ez4_sonar
* /mavros/distance_sensor/hrlv_ez4_pub/id: 0
* /mavros/distance_sensor/hrlv_ez4_pub/orientation: PITCH_270
* /mavros/distance_sensor/hrlv_ez4_pub/send_tf: True
* /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/x: 0.0
* /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/y: 0.0
* /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/z: -0.1
* /mavros/distance_sensor/laser_1_sub/id: 3
* /mavros/distance_sensor/laser_1_sub/orientation: PITCH_270
* /mavros/distance_sensor/laser_1_sub/subscriber: True
* /mavros/distance_sensor/lidarlite_pub/field_of_view: 0.0
* /mavros/distance_sensor/lidarlite_pub/frame_id: lidarlite_laser
* /mavros/distance_sensor/lidarlite_pub/id: 1
* /mavros/distance_sensor/lidarlite_pub/orientation: PITCH_270
* /mavros/distance_sensor/lidarlite_pub/send_tf: True
* /mavros/distance_sensor/lidarlite_pub/sensor_position/x: 0.0
* /mavros/distance_sensor/lidarlite_pub/sensor_position/y: 0.0
* /mavros/distance_sensor/lidarlite_pub/sensor_position/z: -0.1
* /mavros/distance_sensor/sonar_1_sub/horizontal_fov_ratio: 1.0
* /mavros/distance_sensor/sonar_1_sub/id: 2
* /mavros/distance_sensor/sonar_1_sub/orientation: PITCH_270
* /mavros/distance_sensor/sonar_1_sub/subscriber: True
* /mavros/distance_sensor/sonar_1_sub/vertical_fov_ratio: 1.0
* /mavros/fake_gps/eph: 2.0
* /mavros/fake_gps/epv: 2.0
* /mavros/fake_gps/fix_type: 3
* /mavros/fake_gps/geo_origin/alt: 408.0
* /mavros/fake_gps/geo_origin/lat: 47.3667
* /mavros/fake_gps/geo_origin/lon: 8.55
* /mavros/fake_gps/gps_rate: 5.0
* /mavros/fake_gps/mocap_transform: True
* /mavros/fake_gps/satellites_visible: 5
* /mavros/fake_gps/tf/child_frame_id: fix
* /mavros/fake_gps/tf/frame_id: map
* /mavros/fake_gps/tf/listen: False
* /mavros/fake_gps/tf/rate_limit: 10.0
* /mavros/fake_gps/tf/send: False
* /mavros/fake_gps/use_mocap: True
* /mavros/fake_gps/use_vision: False
* /mavros/fcu_protocol: v2.0
* /mavros/fcu_url: udp://127.0.0.1:1...
* /mavros/gcs_url:
* /mavros/global_position/child_frame_id: base_link
* /mavros/global_position/frame_id: map
* /mavros/global_position/gps_uere: 1.0
* /mavros/global_position/rot_covariance: 99999.0
* /mavros/global_position/tf/child_frame_id: base_link
* /mavros/global_position/tf/frame_id: map
* /mavros/global_position/tf/global_frame_id: earth
* /mavros/global_position/tf/send: False
* /mavros/global_position/use_relative_alt: True
* /mavros/image/frame_id: px4flow
* /mavros/imu/angular_velocity_stdev: 0.0003490659 // 0...
* /mavros/imu/frame_id: base_link
* /mavros/imu/linear_acceleration_stdev: 0.0003
* /mavros/imu/magnetic_stdev: 0.0
* /mavros/imu/orientation_stdev: 1.0
* /mavros/landing_target/camera/fov_x: 2.0071286398
* /mavros/landing_target/camera/fov_y: 2.0071286398
* /mavros/landing_target/image/height: 480
* /mavros/landing_target/image/width: 640
* /mavros/landing_target/land_target_type: VISION_FIDUCIAL
* /mavros/landing_target/listen_lt: False
* /mavros/landing_target/mav_frame: LOCAL_NED
* /mavros/landing_target/target_size/x: 0.3
* /mavros/landing_target/target_size/y: 0.3
* /mavros/landing_target/tf/child_frame_id: camera_center
* /mavros/landing_target/tf/frame_id: landing_target
* /mavros/landing_target/tf/listen: False
* /mavros/landing_target/tf/rate_limit: 10.0
* /mavros/landing_target/tf/send: True
* /mavros/local_position/frame_id: map
* /mavros/local_position/tf/child_frame_id: base_link
* /mavros/local_position/tf/frame_id: map
* /mavros/local_position/tf/send: False
* /mavros/local_position/tf/send_fcu: False
* /mavros/mission/pull_after_gcs: True
* /mavros/mission/use_mission_item_int: True
* /mavros/mocap/use_pose: True
* /mavros/mocap/use_tf: False
* /mavros/mount/debounce_s: 4.0
* /mavros/mount/err_threshold_deg: 10.0
* /mavros/mount/negate_measured_pitch: False
* /mavros/mount/negate_measured_roll: False
* /mavros/mount/negate_measured_yaw: False
* /mavros/odometry/fcu/odom_child_id_des: base_link
* /mavros/odometry/fcu/odom_parent_id_des: map
* /mavros/plugin_blacklist: ['safety_area', '...
* /mavros/plugin_whitelist: []
* /mavros/px4flow/frame_id: px4flow
* /mavros/px4flow/ranger_fov: 0.118682
* /mavros/px4flow/ranger_max_range: 5.0
* /mavros/px4flow/ranger_min_range: 0.3
* /mavros/safety_area/p1/x: 1.0
* /mavros/safety_area/p1/y: 1.0
* /mavros/safety_area/p1/z: 1.0
* /mavros/safety_area/p2/x: -1.0
* /mavros/safety_area/p2/y: -1.0
* /mavros/safety_area/p2/z: -1.0
* /mavros/setpoint_accel/send_force: False
* /mavros/setpoint_attitude/reverse_thrust: False
* /mavros/setpoint_attitude/tf/child_frame_id: target_attitude
* /mavros/setpoint_attitude/tf/frame_id: map
* /mavros/setpoint_attitude/tf/listen: False
* /mavros/setpoint_attitude/tf/rate_limit: 50.0
* /mavros/setpoint_attitude/use_quaternion: False
* /mavros/setpoint_position/mav_frame: LOCAL_NED
* /mavros/setpoint_position/tf/child_frame_id: target_position
* /mavros/setpoint_position/tf/frame_id: map
* /mavros/setpoint_position/tf/listen: False
* /mavros/setpoint_position/tf/rate_limit: 50.0
* /mavros/setpoint_raw/thrust_scaling: 1.0
* /mavros/setpoint_velocity/mav_frame: LOCAL_NED
* /mavros/startup_px4_usb_quirk: False
* /mavros/sys/disable_diag: False
* /mavros/sys/min_voltage: 10.0
* /mavros/target_component_id: 1
* /mavros/target_system_id: 1
* /mavros/tdr_radio/low_rssi: 40
* /mavros/time/time_ref_source: fcu
* /mavros/time/timesync_avg_alpha: 0.6
* /mavros/time/timesync_mode: MAVLINK
* /mavros/vibration/frame_id: base_link
* /mavros/vision_pose/tf/child_frame_id: vision_estimate
* /mavros/vision_pose/tf/frame_id: odom
* /mavros/vision_pose/tf/listen: False
* /mavros/vision_pose/tf/rate_limit: 10.0
* /mavros/vision_speed/listen_twist: True
* /mavros/vision_speed/twist_cov: True
* /mavros/wheel_odometry/child_frame_id: base_link
* /mavros/wheel_odometry/count: 2
* /mavros/wheel_odometry/frame_id: odom
* /mavros/wheel_odometry/send_raw: True
* /mavros/wheel_odometry/send_twist: False
* /mavros/wheel_odometry/tf/child_frame_id: base_link
* /mavros/wheel_odometry/tf/frame_id: odom
* /mavros/wheel_odometry/tf/send: False
* /mavros/wheel_odometry/use_rpm: False
* /mavros/wheel_odometry/vel_error: 0.1
* /mavros/wheel_odometry/wheel0/radius: 0.05
* /mavros/wheel_odometry/wheel0/x: 0.0
* /mavros/wheel_odometry/wheel0/y: -0.15
* /mavros/wheel_odometry/wheel1/radius: 0.05
* /mavros/wheel_odometry/wheel1/x: 0.0
* /mavros/wheel_odometry/wheel1/y: 0.15
* /rosdistro: melodic
* /rosversion: 1.14.13
NODES
/
mavros (mavros/mavros_node)
mavros_test_node (mavros_test/mavros_test_node)
auto-starting new master
process[master]: started with pid [3761]
ROS_MASTER_URI=http://127.0.0.1:11311/
setting /run_id to 68e03f2e-4ba7-11f0-98f1-00037f1247d0
process[rosout-1]: started with pid [3772]
started core service [/rosout]
process[mavros-2]: started with pid [3780]
[ INFO] [1750184285.109890743]: simple_demo
process[mavros_test_node-3]: started with pid [3781]
[ INFO] [1750184285.209937032]: FCU URL: udp://127.0.0.1:14551@:14551
[ INFO] [1750184285.212315616]: udp0: Bind address: 127.0.0.1:14551
[ INFO] [1750184285.212435042]: GCS bridge disabled
[ INFO] [1750184285.223761504]: Plugin 3dr_radio loaded
[ INFO] [1750184285.224909364]: Plugin 3dr_radio initialized
[ INFO] [1750184285.224988009]: Plugin actuator_control loaded
[ INFO] [1750184285.227191854]: Plugin actuator_control initialized
[ INFO] [1750184285.232061416]: Plugin adsb loaded
[ INFO] [1750184285.234366354]: Plugin adsb initialized
[ INFO] [1750184285.234482604]: Plugin altitude loaded
[ INFO] [1750184285.235243746]: Plugin altitude initialized
[ INFO] [1750184285.235522755]: Plugin cam_imu_sync loaded
[ INFO] [1750184285.236044316]: Plugin cam_imu_sync initialized
[ INFO] [1750184285.236145878]: Plugin camera loaded
[ INFO] [1750184285.236777281]: Plugin camera initialized
[ INFO] [1750184285.236882698]: Plugin cellular_status loaded
[ INFO] [1750184285.238670554]: Plugin cellular_status initialized
[ INFO] [1750184285.238792533]: Plugin command loaded
[ INFO] [1750184285.243801730]: Plugin command initialized
[ INFO] [1750184285.243909855]: Plugin companion_process_status loaded
[ INFO] [1750184285.246147762]: Plugin companion_process_status initialized
[ INFO] [1750184285.246364167]: Plugin debug_value loaded
[ INFO] [1750184285.254379654]: Plugin debug_value initialized
[ INFO] [1750184285.254463664]: Plugin distance_sensor blacklisted
[ INFO] [1750184285.254651215]: Plugin esc_status loaded
[ INFO] [1750184285.256089438]: Plugin esc_status initialized
[ INFO] [1750184285.256269437]: Plugin esc_telemetry loaded
[ INFO] [1750184285.256842508]: Plugin esc_telemetry initialized
[ INFO] [1750184285.256979747]: Plugin fake_gps loaded
[ INFO] [1750184285.270586199]: Plugin fake_gps initialized
[ INFO] [1750184285.270774062]: Plugin ftp loaded
[ INFO] [1750184285.276230706]: Plugin ftp initialized
[ INFO] [1750184285.276364455]: Plugin geofence loaded
[ INFO] [1750184285.280234490]: Plugin geofence initialized
[ INFO] [1750184285.280353084]: Plugin global_position loaded
[ INFO] [1750184285.293634381]: Plugin global_position initialized
[ INFO] [1750184285.293813755]: Plugin gps_input loaded
[ INFO] [1750184285.296167703]: Plugin gps_input initialized
[ INFO] [1750184285.296305932]: Plugin gps_rtk loaded
[ INFO] [1750184285.298824202]: Plugin gps_rtk initialized
[ INFO] [1750184285.298963681]: Plugin gps_status loaded
[ INFO] [1750184285.300931172]: Plugin gps_status initialized
[ INFO] [1750184285.301065443]: Plugin guided_target loaded
[ INFO] [1750184285.305234748]: Plugin guided_target initialized
[ INFO] [1750184285.305392559]: Plugin hil loaded
[ INFO] [1750184285.315346371]: Plugin hil initialized
[ INFO] [1750184285.315475849]: Plugin home_position loaded
[ INFO] [1750184285.318475889]: Plugin home_position initialized
[ INFO] [1750184285.318592451]: Plugin imu loaded
[ INFO] [1750184285.324887476]: Plugin imu initialized
[ INFO] [1750184285.325036850]: Plugin landing_target loaded
[ INFO] [1750184285.336912424]: Plugin landing_target initialized
[ INFO] [1750184285.337114298]: Plugin local_position loaded
[ INFO] [1750184285.342381202]: Plugin local_position initialized
[ INFO] [1750184285.342516306]: Plugin log_transfer loaded
[ INFO] [1750184285.345061347]: Plugin log_transfer initialized
[ INFO] [1750184285.345179368]: Plugin mag_calibration_status loaded
[ INFO] [1750184285.345968583]: Plugin mag_calibration_status initialized
[ INFO] [1750184285.346087280]: Plugin manual_control loaded
[ INFO] [1750184285.350035232]: Plugin manual_control initialized
[ INFO] [1750184285.350165596]: Plugin mocap_pose_estimate loaded
[ INFO] [1750184285.356091300]: Plugin mocap_pose_estimate initialized
[ INFO] [1750184285.356221872]: Plugin mount_control loaded
[ WARN] [1750184285.361474089]: Could not retrive negate_measured_roll parameter value, using default (0)
[ WARN] [1750184285.361858671]: Could not retrive negate_measured_pitch parameter value, using default (0)
[ WARN] [1750184285.362223148]: Could not retrive negate_measured_yaw parameter value, using default (0)
[ WARN] [1750184285.363455747]: Could not retrive debounce_s parameter value, using default (4.000000)
[ WARN] [1750184285.363785017]: Could not retrive err_threshold_deg parameter value, using default (10.000000)
[ INFO] [1750184285.363842516]: Plugin mount_control initialized
[ INFO] [1750184285.363987985]: Plugin nav_controller_output loaded
[ INFO] [1750184285.365074282]: Plugin nav_controller_output initialized
[ INFO] [1750184285.365188552]: Plugin obstacle_distance loaded
[ INFO] [1750184285.367211512]: Plugin obstacle_distance initialized
[ INFO] [1750184285.367317397]: Plugin odom loaded
[ INFO] [1750184285.370957590]: Plugin odom initialized
[ INFO] [1750184285.371125506]: Plugin onboard_computer_status loaded
[ INFO] [1750184285.373269351]: Plugin onboard_computer_status initialized
[ INFO] [1750184285.373424194]: Plugin param loaded
[ INFO] [1750184285.375978402]: Plugin param initialized
[ INFO] [1750184285.376109495]: Plugin play_tune loaded
[ INFO] [1750184285.378353600]: Plugin play_tune initialized
[ INFO] [1750184285.378488547]: Plugin px4flow loaded
[ INFO] [1750184285.390864952]: Plugin px4flow initialized
[ INFO] [1750184285.391056670]: Plugin rallypoint loaded
[ INFO] [1750184285.393695982]: Plugin rallypoint initialized
[ INFO] [1750184285.393765513]: Plugin rangefinder blacklisted
[ INFO] [1750184285.393899210]: Plugin rc_io loaded
[ INFO] [1750184285.397218727]: Plugin rc_io initialized
[ INFO] [1750184285.397302216]: Plugin safety_area blacklisted
[ INFO] [1750184285.397432737]: Plugin setpoint_accel loaded
[ INFO] [1750184285.400211787]: Plugin setpoint_accel initialized
[ INFO] [1750184285.400358610]: Plugin setpoint_attitude loaded
[ INFO] [1750184285.408584095]: Plugin setpoint_attitude initialized
[ INFO] [1750184285.408817531]: Plugin setpoint_position loaded
[ INFO] [1750184285.423058772]: Plugin setpoint_position initialized
[ INFO] [1750184285.423248980]: Plugin setpoint_raw loaded
[ INFO] [1750184285.431053478]: Plugin setpoint_raw initialized
[ INFO] [1750184285.431265456]: Plugin setpoint_trajectory loaded
[ INFO] [1750184285.435559552]: Plugin setpoint_trajectory initialized
[ INFO] [1750184285.435753093]: Plugin setpoint_velocity loaded
[ INFO] [1750184285.440572447]: Plugin setpoint_velocity initialized
[ INFO] [1750184285.440804998]: Plugin sys_status loaded
[ INFO] [1750184285.449974021]: Plugin sys_status initialized
[ INFO] [1750184285.450156000]: Plugin sys_time loaded
[ INFO] [1750184285.454825511]: TM: Timesync mode: MAVLINK
[ INFO] [1750184285.455232957]: TM: Not publishing sim time
[ INFO] [1750184285.456293682]: Plugin sys_time initialized
[ INFO] [1750184285.456435087]: Plugin terrain loaded
[ INFO] [1750184285.457385812]: Plugin terrain initialized
[ INFO] [1750184285.457527791]: Plugin trajectory loaded
[ INFO] [1750184285.463945159]: Plugin trajectory initialized
[ INFO] [1750184285.464101773]: Plugin tunnel loaded
[ INFO] [1750184285.472213717]: Plugin tunnel initialized
[ INFO] [1750184285.472432987]: Plugin vfr_hud loaded
[ INFO] [1750184285.473091005]: Plugin vfr_hud initialized
[ INFO] [1750184285.473157203]: Plugin vibration blacklisted
[ INFO] [1750184285.473274911]: Plugin vision_pose_estimate loaded
[ INFO] [1750184285.481329355]: Plugin vision_pose_estimate initialized
[ INFO] [1750184285.481458573]: Plugin vision_speed_estimate loaded
[ INFO] [1750184285.484838142]: Plugin vision_speed_estimate initialized
[ INFO] [1750184285.485011162]: Plugin waypoint loaded
[ INFO] [1750184285.489359008]: Plugin waypoint initialized
[ INFO] [1750184285.489426456]: Plugin wheel_odometry blacklisted
[ INFO] [1750184285.489566820]: Plugin wind_estimation loaded
[ INFO] [1750184285.491681186]: Plugin wind_estimation initialized
[ INFO] [1750184285.491887018]: Built-in SIMD instructions: ARM NEON
[ INFO] [1750184285.491946601]: Built-in MAVLink package version: 2022.12.30
[ INFO] [1750184285.491985143]: Known MAVLink dialects: common ardupilotmega ASLUAV AVSSUAS all cubepilot development icarous matrixpilot paparazzi standard storm32 uAvionix ualberta
[ INFO] [1750184285.492024413]: MAVROS started. MY ID 1.240, TARGET ID 1.1
[ INFO] [1750184285.492452589]: udp0: Remote address: 127.0.0.1:52402
[ INFO] [1750184285.493044253]: IMU: Attitude quaternion IMU detected!
[ INFO] [1750184285.493460866]: RC_CHANNELS message detected!
[ WARN] [1750184285.494036488]: GP: No GPS fix
[ INFO] [1750184285.495672992]: IMU: High resolution IMU detected!
[ INFO] [1750184285.583120636]: CON: Got HEARTBEAT, connected. FCU: PX4 Autopilot
[ INFO] [1750184285.587369733]: IMU: High resolution IMU detected!
[ INFO] [1750184285.588324260]: RC_CHANNELS message detected!
[ WARN] [1750184285.588705092]: CMD: Unexpected command 200, result 4
[ INFO] [1750184285.631424543]: IMU: Attitude quaternion IMU detected!
[ INFO] [1750184286.447042132]: FCU: Onboard controller regained
[ INFO] [1750184286.594461915]: GF: Using MISSION_ITEM_INT
[ INFO] [1750184286.594694049]: RP: Using MISSION_ITEM_INT
[ INFO] [1750184286.594886080]: WP: Using MISSION_ITEM_INT
[ INFO] [1750184286.595040871]: VER: 1.1: Capabilities 0x000000000000e4ef
[ INFO] [1750184286.595179255]: VER: 1.1: Flight software: 01041040 (33795a0a30000000)
[ INFO] [1750184286.595362119]: VER: 1.1: Middleware software: 01041040 (33795a0a30000000)
[ INFO] [1750184286.595525400]: VER: 1.1: OS software: 04137dff (e7701b9e792e3101)
[ INFO] [1750184286.595641285]: VER: 1.1: Board hardware: 00000001
[ INFO] [1750184286.595781180]: VER: 1.1: VID/PID: 0000:0000
[ INFO] [1750184286.595900242]: VER: 1.1: UID: 3044494530303030
[ INFO] [1750184290.124741638]: waiting for offboard mode
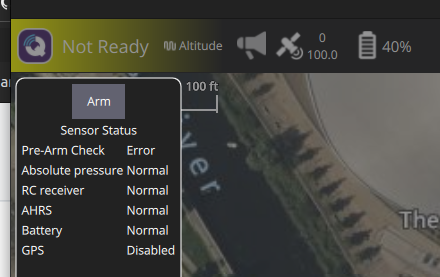
After doing switch, the QGC shows that I changed to Altitude mode, and the drone can not arm.
[ INFO] [1750184295.585805461]: HP: requesting home position
[ WARN] [1750184295.598322751]: CMD: Unexpected command 200, result 4
[ INFO] [1750184300.585223300]: GF: mission received
[ INFO] [1750184300.588035320]: RP: mission received
[ INFO] [1750184300.588438703]: WP: mission received
[ INFO] [1750184305.585716033]: HP: requesting home position
[ WARN] [1750184306.094015932]: CMD: Unexpected command 200, result 4
[ INFO] [1750184315.585737496]: HP: requesting home position
[ WARN] [1750184315.640176117]: GP: No GPS fix
[ WARN] [1750184316.616906712]: CMD: Unexpected command 200, result 4
[ INFO] [1750184325.587073022]: HP: requesting home position
[ WARN] [1750184327.127748956]: CMD: Unexpected command 200, result 4
[ WARN] [1750184332.700637205]: PositionTargetGlobal failed because no origin
[ WARN] [1750184332.799973862]: PositionTargetGlobal failed because no origin
[ INFO] [1750184335.585770281]: HP: requesting home position
[ WARN] [1750184337.613212719]: CMD: Unexpected command 200, result 4
[ INFO] [1750184345.585775924]: HP: requesting home position
[ WARN] [1750184345.642516774]: GP: No GPS fix
[ WARN] [1750184348.114619803]: CMD: Unexpected command 200, result 4
[ INFO] [1750184355.585928133]: HP: requesting home position
[ WARN] [1750184358.127486905]: CMD: Unexpected command 200, result 4
[ INFO] [1750184365.585804459]: HP: requesting home position
[ WARN] [1750184368.614588172]: CMD: Unexpected command 200, result 4
[ INFO] [1750184375.585908496]: HP: requesting home position
[ WARN] [1750184375.841301462]: GP: No GPS fix
[ WARN] [1750184378.615369133]: CMD: Unexpected command 200, result 4
[ WARN] [1750184378.844832106]: PositionTargetGlobal failed because no origin
[ WARN] [1750184378.945157352]: PositionTargetGlobal failed because no origin
[ WARN] [1750184382.966882947]: PositionTargetGlobal failed because no origin
[ WARN] [1750184383.067533244]: PositionTargetGlobal failed because no origin
[ INFO] [1750184385.597828473]: HP: requesting home position
[ WARN] [1750184389.110877295]: CMD: Unexpected command 200, result 4
Another strange thing is the flight mode page in QGC, it did not show the available mode.
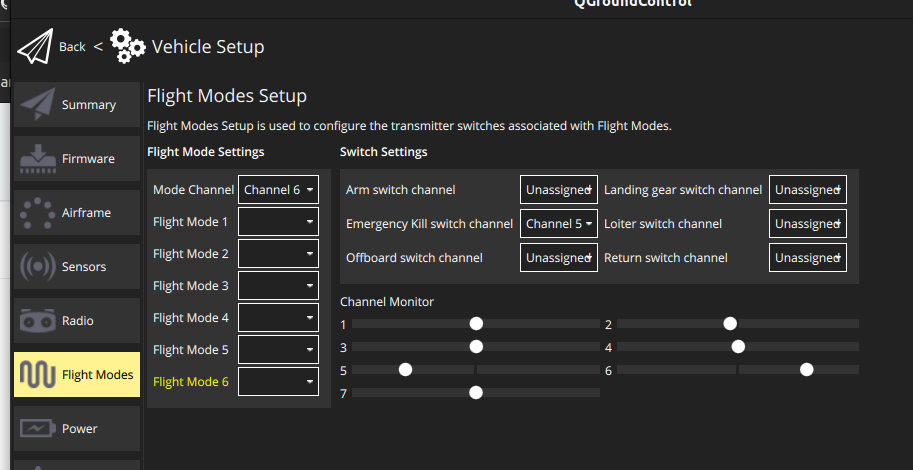
And the pre-flight check is always error:
I wonder whether this is the problem of the version of system image or the QGC parameters I used. It seems a bit difficult for me to test anything.
Btw, do you ever give it a try on using the mocap system with onboard MAVROS? If so, could you suggest me that should I run the mocap server also on board or on my host machine? And will there be any time sync problem still?
Best wishes,
Selina