Thank you everyone for helping me. After I was able to solve the internet problem in the VOXL, everything was solved. All the problems I had in the threads above were mostly because of not having internet in the VOXL. It was hard to connect to University's wifi and Mobile hotspot did not work few times in the beginning. Yesterday, I was able to connect VOXL and Laptop to my mobile hotspot and everything was much easier.
I will keep working on the m500 drone and keep asking more questions in the forum as I progress.
P
parbat101
@parbat101
Posts
-
problems cloning MAVSDK Python docker from Gitlab -
Connecting VOXL m500 drone to a mobile hotspot@Alex-Gardner Thank you. I have been trying the same instructions but I did not realize that I was having problems because of my mobile hotspot's name. Just fixed it. Thanks.
-
problems cloning MAVSDK Python docker from Gitlab@tom The videos were super helpful and the drone worked as shown in the video.
To test other flight patterns, I want to edit the test file takeoff_and_land2.py file which I think is inside the docker images.
Can you please suggest me the best way to do it? -
Connecting VOXL m500 drone to a mobile hotspotHi,
I am having trouble connecting internet to the VOXL m500 drone because of my school's internet. I want to connect both my laptop and m500 drone to my mobile hotspot using station mode.
I would appreciate it if somebody can guide me through a step-by-step process to do that. -
problems cloning MAVSDK Python docker from Gitlab@tom Thank you for the video links. I will follow those videos.
-
problems cloning MAVSDK Python docker from Gitlab@tom Thank you so much for explaining.
-
problems cloning MAVSDK Python docker from Gitlab@modaltb Thank you for explaining.
I couldnot connect internet on the voxl however I downloaded the files on the computer and used adb push to transfer those to VOXL.
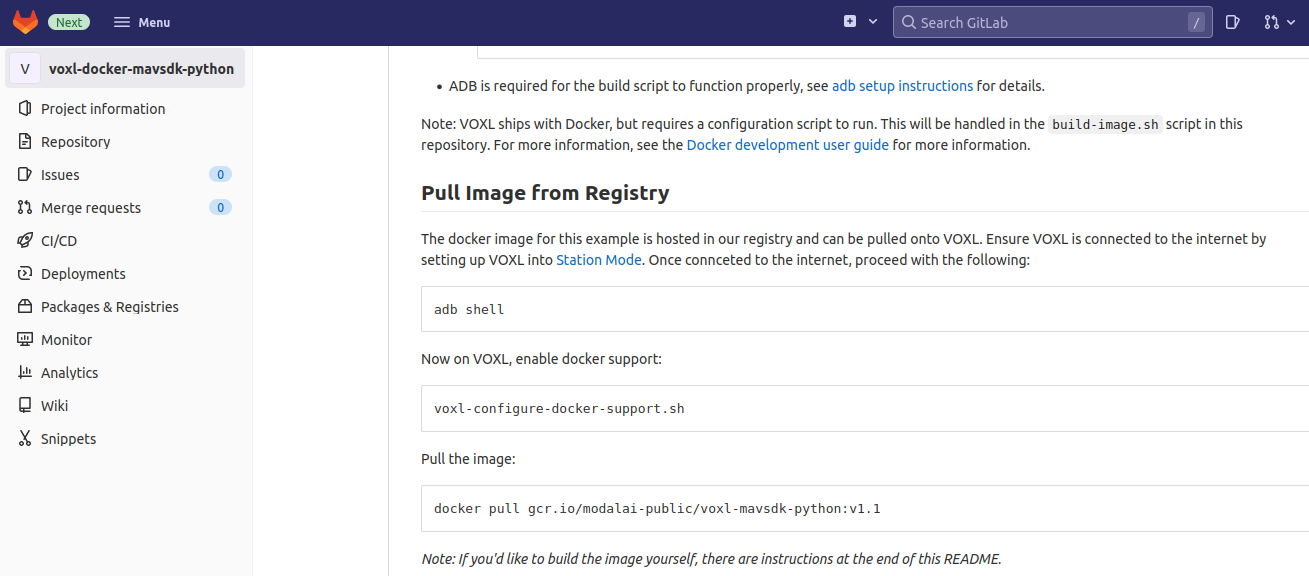
Then, I followed the steps to execte the example program given at:
https://gitlab.com/voxl-public/voxl-docker-images/voxl-docker-mavsdk-pythonThe motors (without propellers,For Safety) did spin on the drones so I assumed the drone can fly autonomously using sample program provided in MAVSDK Python in Gitlab page mentioned above...
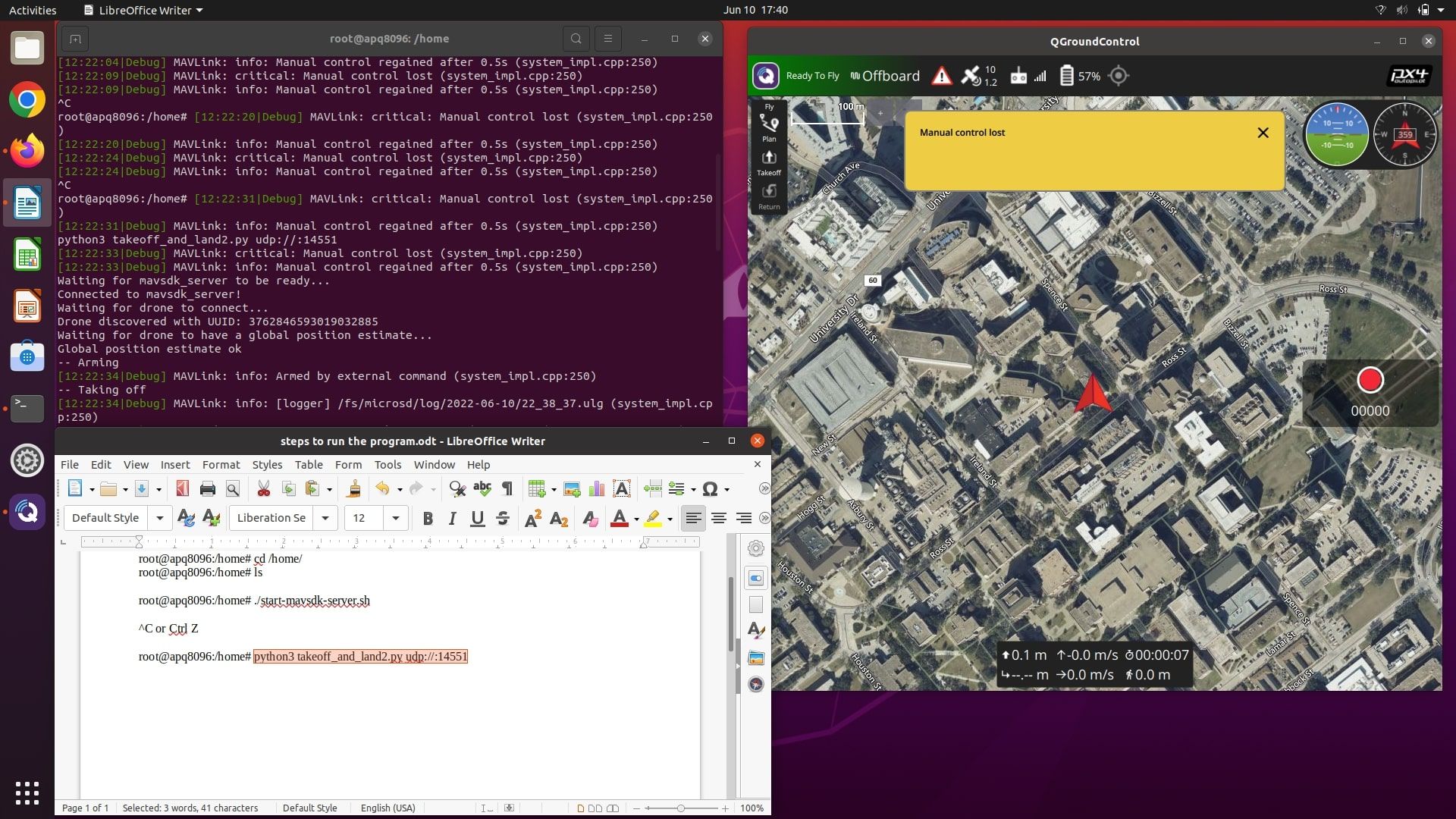
However, when I connected the QGroundControl and tried connecting the Transmitter (DX6e, recommended with m500 in the website),it says manual control lost.
Until Yesterday, I used to use the manual and position flight mode with the transmitter in the QGroundControl flawlessly but now I cannot connect the controller. "Manual Control Lost" appears on the screen.
I am trying to connect the transmitter for Manual Kill Switch Mode.
I have attached the picture of the problem below. Please let me know what could be the problem. Thank You.
-
problems cloning MAVSDK Python docker from Gitlabupdate:
-
problems cloning MAVSDK Python docker from GitlabHi Tom,
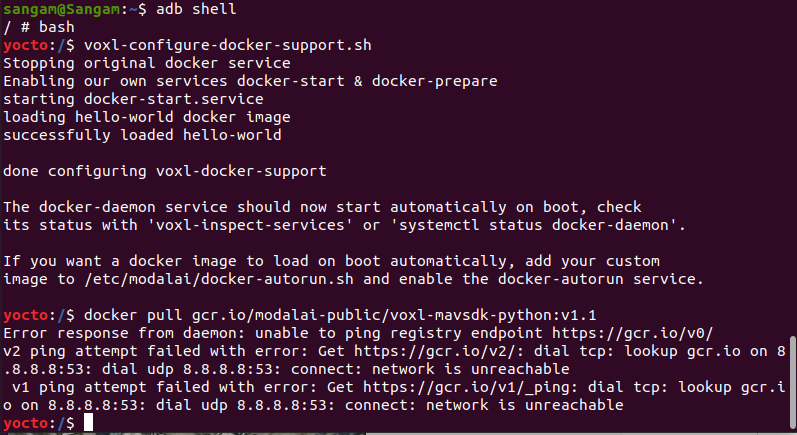
Using your link I was able to clone the files. I generated the SSH key for Gitlab to clone via ssh, it didnot work. Is there any difference between the outcome of the file and their storage location while using https vs ssh?I proceeded forward with using MAVSDK in python using Docker container and followed the steps at:
https://gitlab.com/voxl-public/voxl-docker-images/voxl-docker-mavsdk-python
In the step - Pull the image, I received error. The error is shown below:

Please help me solve this error. -
problems cloning MAVSDK Python docker from GitlabYes it worked. Thank you so much!
-
problems cloning MAVSDK Python docker from GitlabHi,
I am trying to run MAVSDK Python on a Docker using the instructions posted on:
https://docs.modalai.com/mavsdk/
and
https://gitlab.com/voxl-public/voxl-docker-images/voxl-docker-mavsdk-python.
I am having a following issue:Cloning into 'voxl-docker-mavsdk-python'...
git@gitlab.com: Permission denied (publickey).
fatal: Could not read from remote repository.
Please make sure you have the correct access rights
and the repository exists.Please let me know how can I access the file or clone it
-
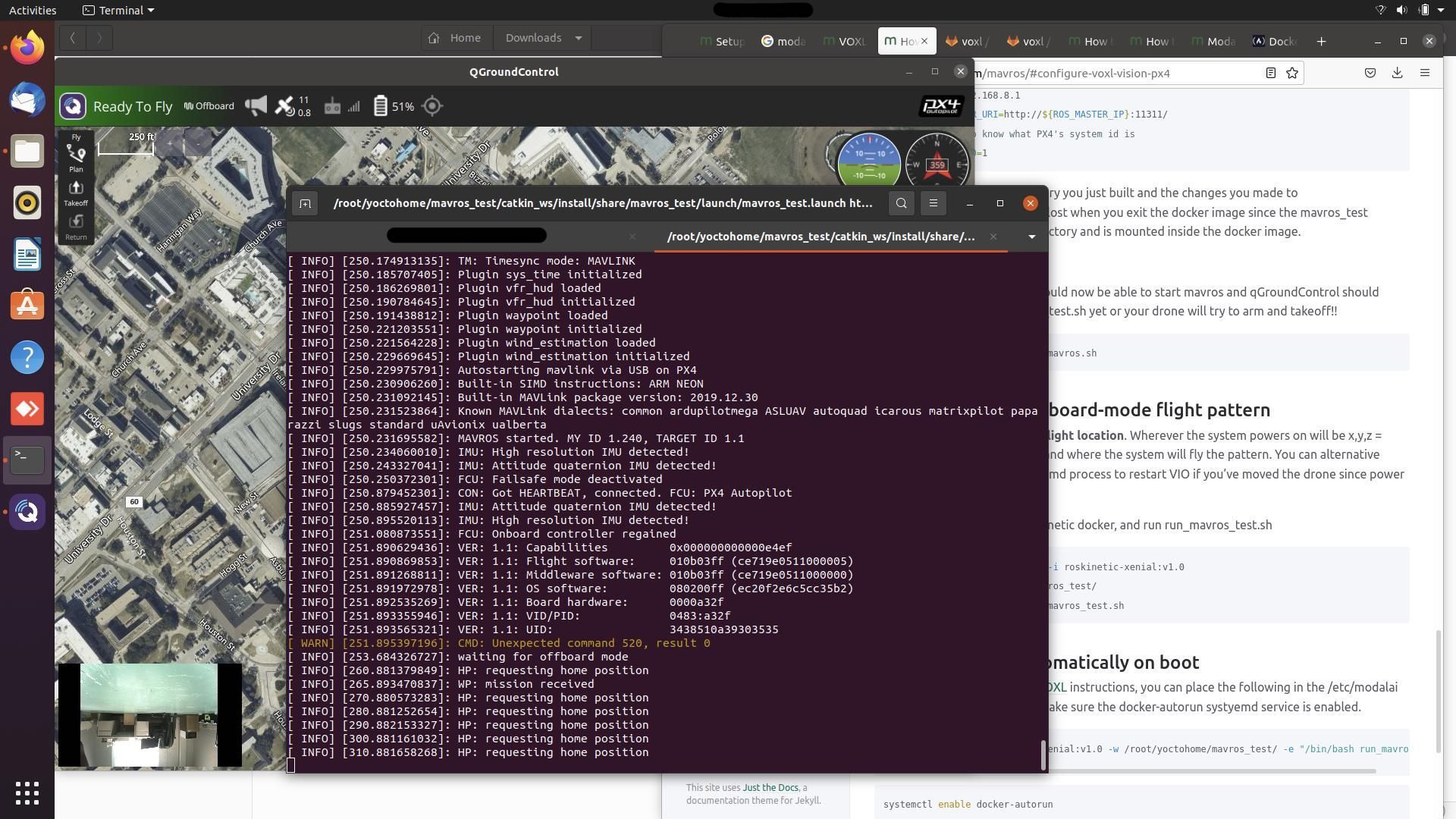
VOXL not connecting to QGC@Aks Thank you for your reply. My problem is also with MAVROS; it does not take off at last step and requests for home position. The drone (VOXL m500) takes off and I can control it flawlessly on manual and position flight mode.
I also enabled "en_send_vio_to_qgc" after your suggestion; the MAVROS flight did not work. It still does not take off in the MAVROS flight test. For manual mode and position flight mode, I did not have any problems.
I am not sure what is the problem with the MAVROS flight???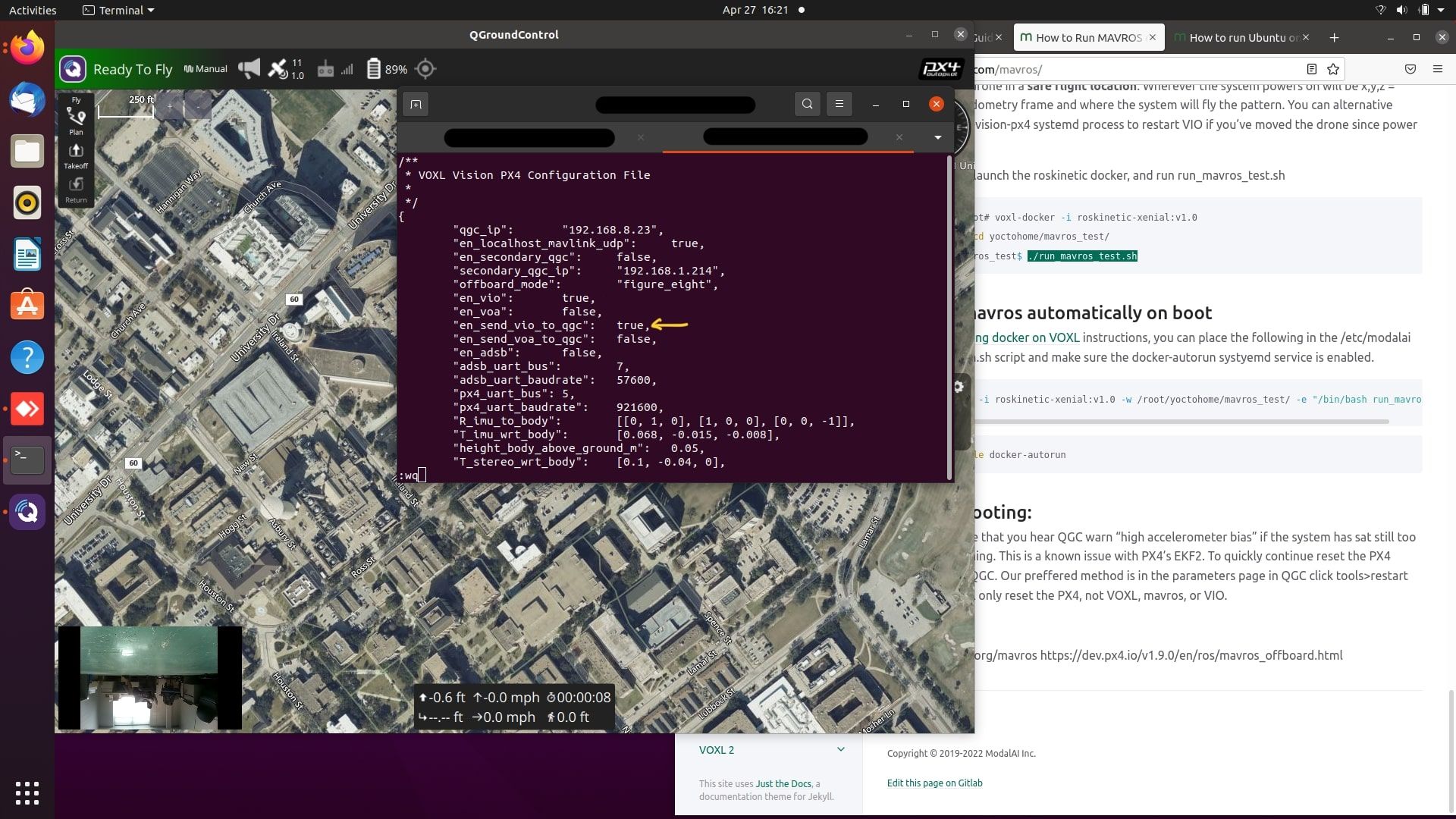
-
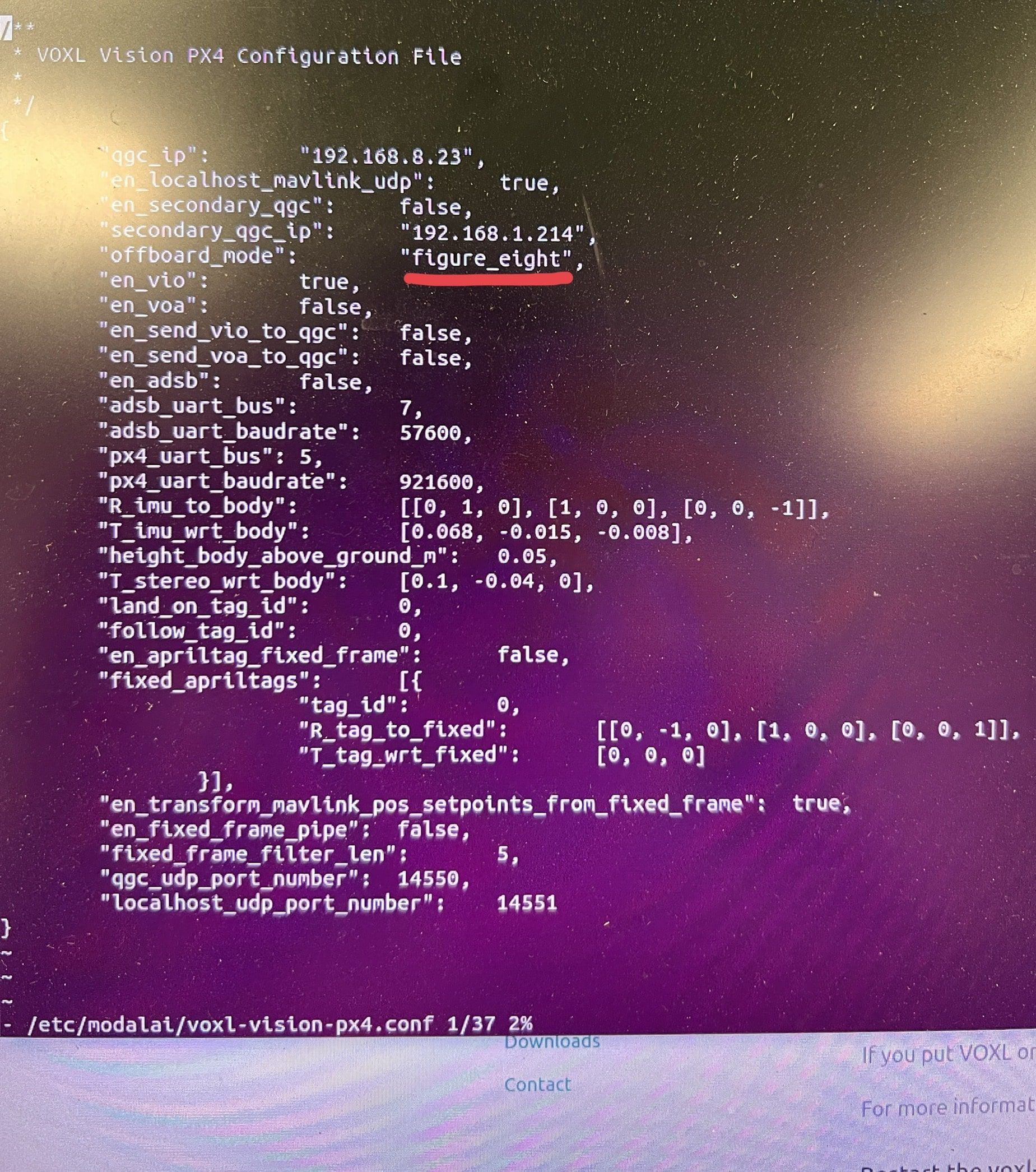
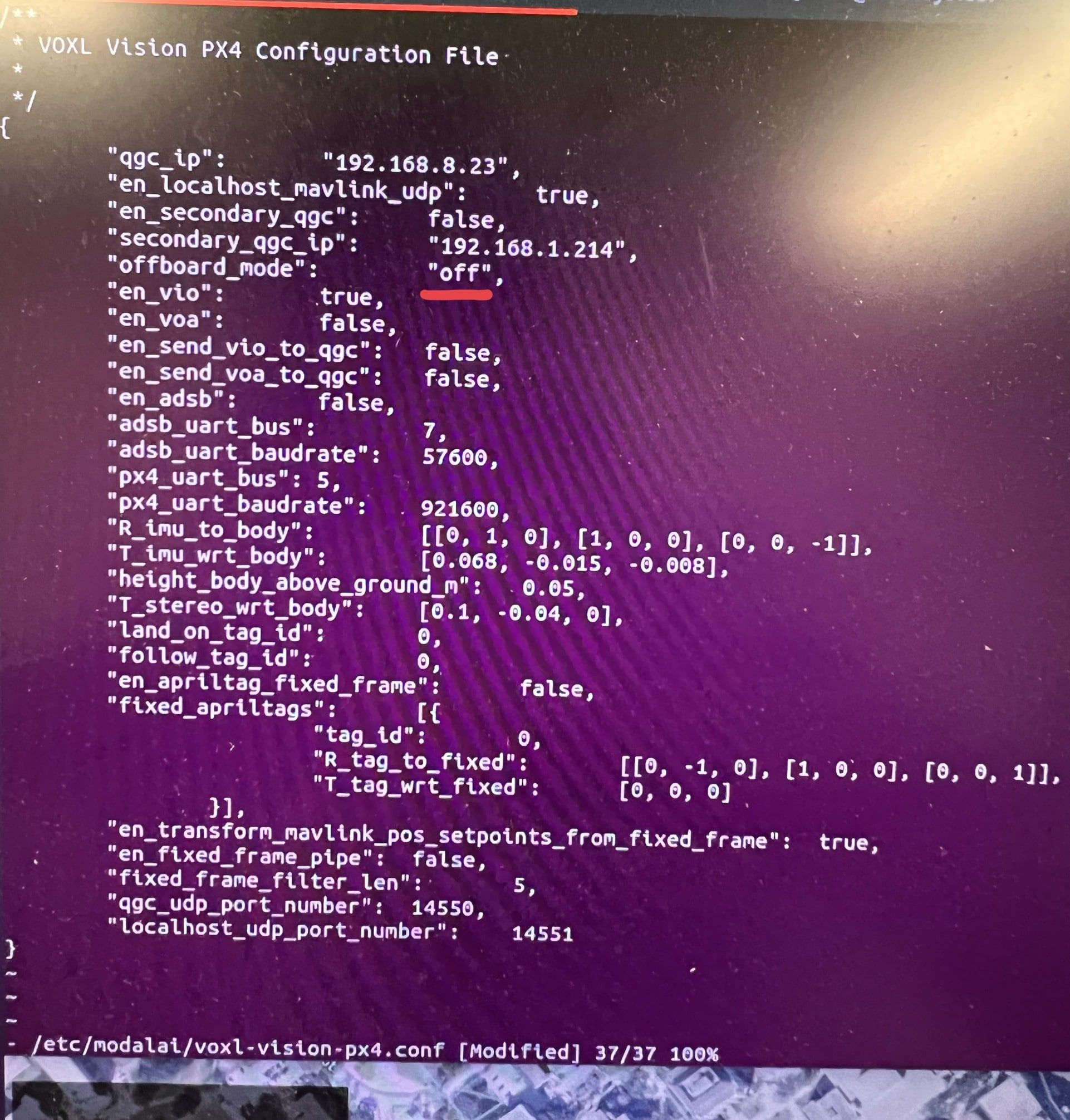
VOXL not connecting to QGC@James-Strawson I also set offboard_mode of vvpx4 to "off" while running mavros test and the drone still does not take off. I have also attached the pictures of what I changed.
-
VOXL not connecting to QGC@James-Strawson Can you please elaborate on setting vvpx4 offboard_mode "off" while using MAVROS. I am having a similar issue: my drone does not take off, and the screen displays "requesting home position" when I am running mavros_test.sh file.
If you can guide me through the steps of turning vvpx4 offboard_mode "off", that would be great. Thank You. -
Drone does not take off in MAVROSHi,
I am using an m500 drone. It works/takes off flawlessly in Manual and Position mode. The drone does not take off while testing mavros test file.
I ran Ubuntu on VOXL using Docker following steps on this page: https://docs.modalai.com/docker-on-voxl/
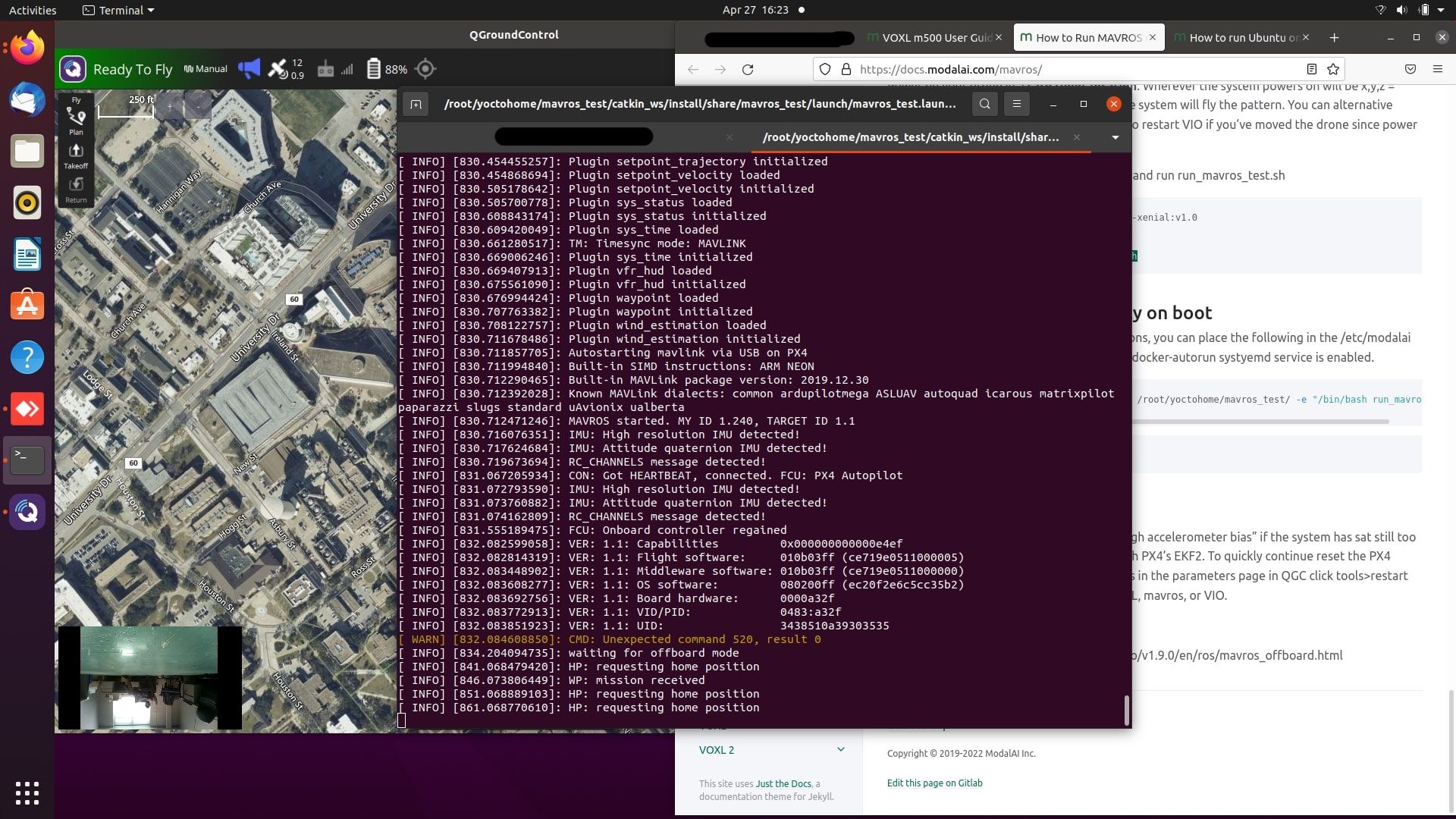
Then, I installed MAVROS on VOXL by following the steps on this page: https://docs.modalai.com/mavros/When I am testing mavros_test.sh or mavros.sh, the Drone does not takeoff. I have shared the image of the screen.
I don't understand these two messages on the screen:- Unexpected Command 520
- Requesting home position
I tested the whole procedure on two drones multiple times and I get those same messages every time.
-
MavRos with drone won't do takeoffI am having the same problem. @Daniel-Ryu Did you solve this issue? If yes, please let me know.