@Eric-Katzfey Can you provide simple instructions on how to configure an arm switch instead of using the arm gesture (moving throttle to bottom right)?
Also, can you provide the typical Radio and Flight modes configurations maintained by ModalAI team prior sending the controller and drone to the buyer? I would like to try the same configuration to arm the drone?
O
oiler251
@oiler251
Posts
-
Urgent Support needed for Drone not armed after RC controller calibration -
Urgent Support needed for Drone not armed after RC controller calibration@Eric-Katzfey The current value of EKF2_GPS_CHECK is 245. I clicked on the number and replaced the 245 with 1 and clicked save button. It does not replace the number.
Regarding throttle error msg, it appears when the left gimble is to the bottom right corner which is what the VOXL developer bootcamp instruction.Is there an expert who can support over the phone or video call?
If there is none, then can you provide your supervisor contact information that i can forward to my manager to take care of the issue.
My team need basic drone functionality where we can take off the drone and land. -
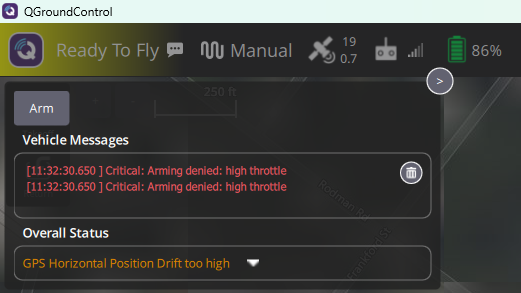
Urgent Support needed for Drone not armed after RC controller calibration@Eric-Katzfey Below is the error message on QGroundControl.
-
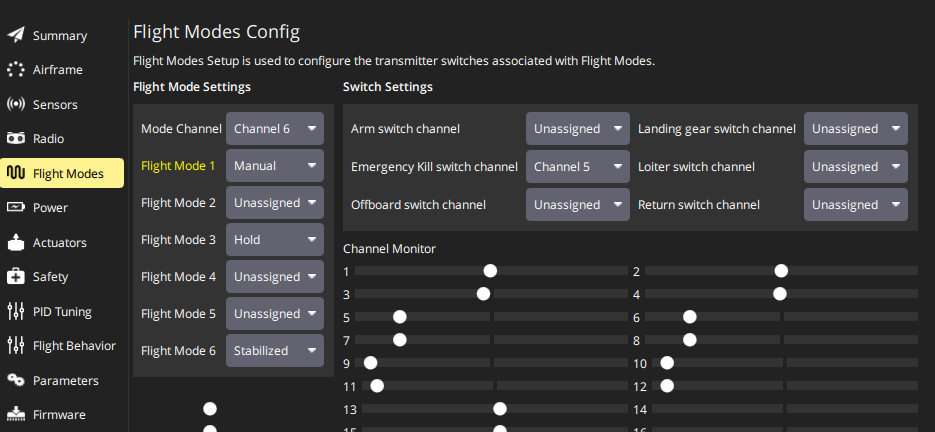
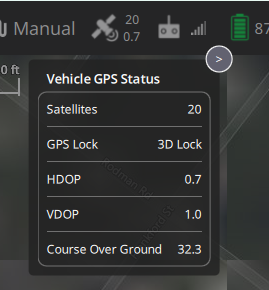
Urgent Support needed for Drone not armed after RC controller calibration@oiler251 Below is the Flight Mode configuration and GPS status.
-
Urgent Support needed for Drone not armed after RC controller calibration@Eric-Katzfey Please, advise if we can setup phone call or video call to resolve the issue?
Our team has an upcoming event that require the drone to be functional.
Also, advise if we need to ship it to your team to fix it otherwise. -
Urgent Support needed for Drone not armed after RC controller calibration@Eric-Katzfey Below is the px4-parameters.
voxl2:~$ px4-param show
Symbols: x = used, + = saved, * = unsaved
x ASPD_SCALE_1 [0,23] : 1.0000
x + BAT1_CAPACITY [1,42] : 3950.0000
x + BAT1_N_CELLS [2,45] : 4
x + BAT1_R_INTERNAL [3,46] : 0.0220
x BAT1_SOURCE [4,48] : 0
x + BAT1_V_CHARGED [5,50] : 4.1000
x + BAT1_V_EMPTY [6,52] : 2.8000
x BAT1_V_LOAD_DROP [7,53] : 0.1000
x + BAT_AVRG_CURRENT [8,68] : 3.4000
x + BAT_CRIT_THR [9,69] : 0.1000
x BAT_EMERGEN_THR [10,70] : 0.0500
x BAT_LOW_THR [11,71] : 0.1500
x BAT_N_CELLS [12,72] : 3
x BAT_V_CHARGED [13,73] : 4.0500
x BAT_V_EMPTY [14,74] : 3.6000
x BAT_V_LOAD_DROP [15,75] : 0.3000
x + CAL_ACC0_ID [16,77] : 2490378
x + CAL_ACC0_PRIO [17,78] : 50
x CAL_ACC0_ROT [18,79] : -1
x + CAL_ACC0_XOFF [19,80] : 0.0104
x + CAL_ACC0_XSCALE [20,81] : 0.9994
x + CAL_ACC0_YOFF [21,82] : 0.0122
x + CAL_ACC0_YSCALE [22,83] : 1.0011
x + CAL_ACC0_ZOFF [23,84] : 0.2113
x + CAL_ACC0_ZSCALE [24,85] : 0.9873
x CAL_ACC1_ID [25,86] : 0
x CAL_ACC2_ID [26,95] : 0
x CAL_ACC3_ID [27,104] : 0
x CAL_AIR_CMODEL [28,113] : 0
x CAL_AIR_TUBED_MM [29,114] : 1.5000
x CAL_AIR_TUBELEN [30,115] : 0.2000
x CAL_BARO0_ID [31,116] : 0
x CAL_BARO1_ID [32,119] : 0
x CAL_BARO2_ID [33,122] : 0
x CAL_BARO3_ID [34,125] : 0
x + CAL_GYRO0_ID [35,128] : 2490378
x + CAL_GYRO0_PRIO [36,129] : 50
x CAL_GYRO0_ROT [37,130] : -1
x + CAL_GYRO0_XOFF [38,131] : 0.0010
x + CAL_GYRO0_YOFF [39,132] : 0.0099
x + CAL_GYRO0_ZOFF [40,133] : -0.0099
x CAL_GYRO1_ID [41,134] : 0
x CAL_GYRO2_ID [42,140] : 0
x CAL_GYRO3_ID [43,146] : 0
x + CAL_MAG0_ID [44,152] : 527625
x + CAL_MAG0_PRIO [45,153] : 75
x + CAL_MAG0_ROT [46,154] : 0
x CAL_MAG0_XCOMP [47,155] : 0.0000
x + CAL_MAG0_XODIAG [48,156] : 0.0051
x + CAL_MAG0_XOFF [49,157] : -0.1164
x + CAL_MAG0_XSCALE [50,158] : 0.9666
x CAL_MAG0_YCOMP [51,159] : 0.0000
x + CAL_MAG0_YODIAG [52,160] : -0.0198
x + CAL_MAG0_YOFF [53,161] : -0.2084
x + CAL_MAG0_YSCALE [54,162] : 1.0124
x CAL_MAG0_ZCOMP [55,163] : 0.0000
x + CAL_MAG0_ZODIAG [56,164] : 0.0136
x + CAL_MAG0_ZOFF [57,165] : 0.0563
x + CAL_MAG0_ZSCALE [58,166] : 1.0239
x CAL_MAG1_ID [59,167] : 0
x CAL_MAG1_ROT [60,169] : -1
x CAL_MAG2_ID [61,182] : 0
x CAL_MAG2_ROT [62,184] : -1
x CAL_MAG3_ID [63,197] : 0
x CAL_MAG3_ROT [64,199] : -1
x CAL_MAG_COMP_TYP [65,212] : 0
x CAL_MAG_SIDES [66,213] : 63
x CA_AIRFRAME [67,224] : 0
x CA_FAILURE_MODE [68,225] : 0
x CA_METHOD [69,240] : 2
x CA_R0_SLEW [70,241] : 0.0000
x CA_R10_SLEW [71,242] : 0.0000
x CA_R11_SLEW [72,243] : 0.0000
x CA_R1_SLEW [73,244] : 0.0000
x CA_R2_SLEW [74,245] : 0.0000
x CA_R3_SLEW [75,246] : 0.0000
x CA_R4_SLEW [76,247] : 0.0000
x CA_R5_SLEW [77,248] : 0.0000
x CA_R6_SLEW [78,249] : 0.0000
x CA_R7_SLEW [79,250] : 0.0000
x CA_R8_SLEW [80,251] : 0.0000
x CA_R9_SLEW [81,252] : 0.0000
x CA_ROTOR0_AX [82,253] : 0.0000
x CA_ROTOR0_AY [83,254] : 0.0000
x CA_ROTOR0_AZ [84,255] : -1.0000
x CA_ROTOR0_CT [85,256] : 6.5000
x CA_ROTOR0_KM [86,257] : 0.0500
x + CA_ROTOR0_PX [87,258] : 0.0850
x + CA_ROTOR0_PY [88,259] : 0.0625
x CA_ROTOR0_PZ [89,260] : 0.0000
x CA_ROTOR10_AX [90,262] : 0.0000
x CA_ROTOR10_AY [91,263] : 0.0000
x CA_ROTOR10_AZ [92,264] : -1.0000
x CA_ROTOR10_CT [93,265] : 6.5000
x CA_ROTOR10_KM [94,266] : 0.0500
x CA_ROTOR10_PX [95,267] : 0.0000
x CA_ROTOR10_PY [96,268] : 0.0000
x CA_ROTOR10_PZ [97,269] : 0.0000
x CA_ROTOR11_AX [98,271] : 0.0000
x CA_ROTOR11_AY [99,272] : 0.0000
x CA_ROTOR11_AZ [100,273] : -1.0000
x CA_ROTOR11_CT [101,274] : 6.5000
x CA_ROTOR11_KM [102,275] : 0.0500
x CA_ROTOR11_PX [103,276] : 0.0000
x CA_ROTOR11_PY [104,277] : 0.0000
x CA_ROTOR11_PZ [105,278] : 0.0000
x CA_ROTOR1_AX [106,280] : 0.0000
x CA_ROTOR1_AY [107,281] : 0.0000
x CA_ROTOR1_AZ [108,282] : -1.0000
x CA_ROTOR1_CT [109,283] : 6.5000
x CA_ROTOR1_KM [110,284] : 0.0500
x + CA_ROTOR1_PX [111,285] : -0.0850
x + CA_ROTOR1_PY [112,286] : -0.0625
x CA_ROTOR1_PZ [113,287] : 0.0000
x CA_ROTOR2_AX [114,289] : 0.0000
x CA_ROTOR2_AY [115,290] : 0.0000
x CA_ROTOR2_AZ [116,291] : -1.0000
x CA_ROTOR2_CT [117,292] : 6.5000
x + CA_ROTOR2_KM [118,293] : -0.0500
x + CA_ROTOR2_PX [119,294] : 0.0850
x + CA_ROTOR2_PY [120,295] : -0.0625
x CA_ROTOR2_PZ [121,296] : 0.0000
x CA_ROTOR3_AX [122,298] : 0.0000
x CA_ROTOR3_AY [123,299] : 0.0000
x CA_ROTOR3_AZ [124,300] : -1.0000
x CA_ROTOR3_CT [125,301] : 6.5000
x + CA_ROTOR3_KM [126,302] : -0.0500
x + CA_ROTOR3_PX [127,303] : -0.0850
x + CA_ROTOR3_PY [128,304] : 0.0625
x CA_ROTOR3_PZ [129,305] : 0.0000
x CA_ROTOR4_AX [130,307] : 0.0000
x CA_ROTOR4_AY [131,308] : 0.0000
x CA_ROTOR4_AZ [132,309] : -1.0000
x CA_ROTOR4_CT [133,310] : 6.5000
x CA_ROTOR4_KM [134,311] : 0.0500
x CA_ROTOR4_PX [135,312] : 0.0000
x CA_ROTOR4_PY [136,313] : 0.0000
x CA_ROTOR4_PZ [137,314] : 0.0000
x CA_ROTOR5_AX [138,316] : 0.0000
x CA_ROTOR5_AY [139,317] : 0.0000
x CA_ROTOR5_AZ [140,318] : -1.0000
x CA_ROTOR5_CT [141,319] : 6.5000
x CA_ROTOR5_KM [142,320] : 0.0500
x CA_ROTOR5_PX [143,321] : 0.0000
x CA_ROTOR5_PY [144,322] : 0.0000
x CA_ROTOR5_PZ [145,323] : 0.0000
x CA_ROTOR6_AX [146,325] : 0.0000
x CA_ROTOR6_AY [147,326] : 0.0000
x CA_ROTOR6_AZ [148,327] : -1.0000
x CA_ROTOR6_CT [149,328] : 6.5000
x CA_ROTOR6_KM [150,329] : 0.0500
x CA_ROTOR6_PX [151,330] : 0.0000
x CA_ROTOR6_PY [152,331] : 0.0000
x CA_ROTOR6_PZ [153,332] : 0.0000
x CA_ROTOR7_AX [154,334] : 0.0000
x CA_ROTOR7_AY [155,335] : 0.0000
x CA_ROTOR7_AZ [156,336] : -1.0000
x CA_ROTOR7_CT [157,337] : 6.5000
x CA_ROTOR7_KM [158,338] : 0.0500
x CA_ROTOR7_PX [159,339] : 0.0000
x CA_ROTOR7_PY [160,340] : 0.0000
x CA_ROTOR7_PZ [161,341] : 0.0000
x CA_ROTOR8_AX [162,343] : 0.0000
x CA_ROTOR8_AY [163,344] : 0.0000
x CA_ROTOR8_AZ [164,345] : -1.0000
x CA_ROTOR8_CT [165,346] : 6.5000
x CA_ROTOR8_KM [166,347] : 0.0500
x CA_ROTOR8_PX [167,348] : 0.0000
x CA_ROTOR8_PY [168,349] : 0.0000
x CA_ROTOR8_PZ [169,350] : 0.0000
x CA_ROTOR9_AX [170,352] : 0.0000
x CA_ROTOR9_AY [171,353] : 0.0000
x CA_ROTOR9_AZ [172,354] : -1.0000
x CA_ROTOR9_CT [173,355] : 6.5000
x CA_ROTOR9_KM [174,356] : 0.0500
x CA_ROTOR9_PX [175,357] : 0.0000
x CA_ROTOR9_PY [176,358] : 0.0000
x CA_ROTOR9_PZ [177,359] : 0.0000
x + CA_ROTOR_COUNT [178,361] : 4
x CA_R_REV [179,362] : 0
x CA_SV0_SLEW [180,372] : 0.0000
x CA_SV1_SLEW [181,373] : 0.0000
x CA_SV2_SLEW [182,374] : 0.0000
x CA_SV3_SLEW [183,375] : 0.0000
x CA_SV4_SLEW [184,376] : 0.0000
x CA_SV5_SLEW [185,377] : 0.0000
x CA_SV6_SLEW [186,378] : 0.0000
x CA_SV7_SLEW [187,379] : 0.0000
x CBRK_AIRSPD_CHK [188,454] : 0
x CBRK_FLIGHTTERM [189,456] : 121212
x CBRK_IO_SAFETY [190,457] : 22027
x + CBRK_SUPPLY_CHK [191,458] : 894281
x CBRK_USB_CHK [192,459] : 197848
x CBRK_VTOLARMING [193,460] : 0
x COM_ACT_FAIL_ACT [194,461] : 0
x COM_ARM_ARSP_EN [195,462] : 1
x COM_ARM_AUTH_ID [196,463] : 10
x COM_ARM_AUTH_MET [197,464] : 0
x COM_ARM_AUTH_REQ [198,465] : 0
x COM_ARM_AUTH_TO [199,466] : 1.0000
x COM_ARM_BAD_INOV [200,467] : 0
x COM_ARM_CHK_ESCS [201,468] : 0
x COM_ARM_EKF_BIAS [202,469] : 3.0000
x COM_ARM_EKF_HGT [203,470] : 1.0000
x COM_ARM_EKF_POS [204,471] : 0.5000
x COM_ARM_EKF_VEL [205,472] : 0.5000
x COM_ARM_EKF_YAW [206,473] : 0.5000
x COM_ARM_HFLT_CHK [207,474] : 1
x COM_ARM_IMU_ACC [208,475] : 0.7000
x COM_ARM_IMU_GYR [209,476] : 0.2500
x COM_ARM_MAG_ANG [210,477] : 60
x COM_ARM_MAG_STR [211,478] : 2
x COM_ARM_MIS_REQ [212,479] : 0
x COM_ARM_ODID [213,480] : 0
x + COM_ARM_SDCARD [214,481] : 0
x COM_ARM_SWISBTN [215,482] : 0
x COM_ARM_WO_GPS [216,483] : 1
x + COM_CPU_MAX [217,484] : -1.0000
x COM_DISARM_FORCE [218,485] : 0
x + COM_DISARM_LAND [219,486] : 0.1000
x + COM_DISARM_PRFLT [220,487] : 20.0000
x COM_DL_LOSS_T [221,488] : 10
x COM_FAIL_ACT_T [222,489] : 5.0000
x + COM_FLIGHT_UUID [223,490] : 743
x + COM_FLTMODE1 [224,491] : 0
x COM_FLTMODE2 [225,492] : -1
x COM_FLTMODE3 [226,493] : -1
x COM_FLTMODE4 [227,494] : -1
x COM_FLTMODE5 [228,495] : -1
x COM_FLTMODE6 [229,496] : -1
x COM_FLT_PROFILE [230,497] : 0
x COM_FLT_TIME_MAX [231,498] : -1
x COM_FORCE_SAFETY [232,499] : 0
x COM_HLDL_LOSS_T [233,500] : 120
x COM_HLDL_REG_T [234,501] : 0
x COM_HOME_EN [235,502] : 1
x COM_HOME_IN_AIR [236,503] : 0
x COM_IMB_PROP_ACT [237,504] : 0
x + COM_KILL_DISARM [238,505] : 0.0000
x COM_LKDOWN_TKO [239,506] : 3.0000
x COM_LOW_BAT_ACT [240,507] : 0
x COM_MOT_TEST_EN [241,508] : 1
x COM_OBC_LOSS_T [242,509] : 5.0000
x COM_OBL_RC_ACT [243,510] : 0
x COM_OBS_AVOID [244,511] : 0
x COM_OF_LOSS_T [245,512] : 1.0000
x COM_PARACHUTE [246,513] : 0
x COM_POSCTL_NAVL [247,514] : 0
x COM_POS_FS_DELAY [248,515] : 1
x COM_POS_FS_EPH [249,516] : 5.0000
x COM_POS_LOW_EPH [250,517] : -1.0000
x COM_POWER_COUNT [251,518] : 1
x COM_PREARM_MODE [252,519] : 0
x COM_QC_ACT [253,520] : 0
x COM_RCL_EXCEPT [254,521] : 0
x COM_RC_ARM_HYST [255,522] : 1000
x COM_RC_IN_MODE [256,523] : 3
x COM_RC_LOSS_T [257,524] : 0.5000
x COM_RC_OVERRIDE [258,525] : 1
x COM_RC_STICK_OV [259,526] : 30.0000
x + COM_SPOOLUP_TIME [260,527] : 2.0000
x COM_TAKEOFF_ACT [261,528] : 0
x COM_VEL_FS_EVH [262,529] : 1.0000
x COM_WIND_MAX [263,530] : -1.0000
x COM_WIND_WARN [264,531] : -1.0000
x CP_DELAY [265,532] : 0.4000
x CP_DIST [266,533] : -1.0000
x CP_GO_NO_DATA [267,534] : 0
x CP_GUIDE_ANG [268,535] : 30.0000
x EKF2_ABIAS_INIT [269,543] : 0.2000
x EKF2_ABL_ACCLIM [270,544] : 25.0000
x EKF2_ABL_GYRLIM [271,545] : 3.0000
x EKF2_ABL_LIM [272,546] : 0.4000
x EKF2_ABL_TAU [273,547] : 0.5000
x EKF2_ACC_B_NOISE [274,548] : 0.0030
x EKF2_ACC_NOISE [275,549] : 0.3500
x EKF2_AID_MASK [276,550] : 0
x EKF2_ANGERR_INIT [277,551] : 0.1000
x EKF2_ARSP_THR [278,552] : 0.0000
x EKF2_ASPD_MAX [279,553] : 20.0000
x EKF2_ASP_DELAY [280,554] : 100.0000
x EKF2_AVEL_DELAY [281,555] : 5.0000
x EKF2_BARO_CTRL [282,556] : 1
x EKF2_BARO_DELAY [283,557] : 0.0000
x EKF2_BARO_GATE [284,558] : 5.0000
x EKF2_BARO_NOISE [285,559] : 3.5000
x EKF2_BCOEF_X [286,560] : 100.0000
x EKF2_BCOEF_Y [287,561] : 100.0000
x EKF2_BETA_GATE [288,562] : 5.0000
x EKF2_BETA_NOISE [289,563] : 0.3000
x EKF2_DECL_TYPE [290,564] : 7
x EKF2_DRAG_CTRL [291,565] : 0
x EKF2_DRAG_NOISE [292,566] : 2.5000
x EKF2_EAS_NOISE [293,567] : 1.4000
x EKF2_EVA_NOISE [294,568] : 0.1000
x EKF2_EVP_GATE [295,569] : 5.0000
x EKF2_EVP_NOISE [296,570] : 0.1000
x EKF2_EVV_GATE [297,571] : 3.0000
x EKF2_EVV_NOISE [298,572] : 0.1000
x + EKF2_EV_CTRL [299,573] : 0
x EKF2_EV_DELAY [300,574] : 0.0000
x EKF2_EV_HGT_TO [301,575] : 5000
x EKF2_EV_NOISE_MD [302,576] : 0
x EKF2_EV_POS_TO [303,577] : 1000
x EKF2_EV_POS_X [304,578] : 0.0000
x EKF2_EV_POS_Y [305,579] : 0.0000
x EKF2_EV_POS_Z [306,580] : 0.0000
x EKF2_EV_QMIN [307,581] : 0
x EKF2_FUSE_BETA [308,582] : 0
x EKF2_GBIAS_INIT [309,583] : 0.1000
x EKF2_GND_EFF_DZ [310,584] : 4.0000
x EKF2_GND_MAX_HGT [311,585] : 0.5000
x EKF2_GPS_CHECK [312,586] : 245
x EKF2_GPS_CTRL [313,587] : 7
x EKF2_GPS_DELAY [314,588] : 110.0000
x EKF2_GPS_POS_X [315,589] : 0.0000
x EKF2_GPS_POS_Y [316,590] : 0.0000
x EKF2_GPS_POS_Z [317,591] : 0.0000
x EKF2_GPS_P_GATE [318,592] : 5.0000
x EKF2_GPS_P_NOISE [319,593] : 0.5000
x EKF2_GPS_V_GATE [320,594] : 5.0000
x EKF2_GPS_V_NOISE [321,595] : 0.3000
x EKF2_GRAV_NOISE [322,596] : 1.0000
x EKF2_GSF_TAS [323,597] : 15.0000
x EKF2_GYR_B_LIM [324,598] : 0.1500
x EKF2_GYR_B_NOISE [325,599] : 0.0010
x EKF2_GYR_NOISE [326,600] : 0.0150
x EKF2_HDG_GATE [327,601] : 2.6000
x EKF2_HEAD_NOISE [328,602] : 0.3000
x EKF2_HGT_REF [329,603] : 1
x EKF2_IMU_CTRL [330,604] : 3
x + EKF2_IMU_POS_X [331,605] : 0.0050
x + EKF2_IMU_POS_Y [332,606] : 0.0080
x + EKF2_IMU_POS_Z [333,607] : -0.0116
x EKF2_MAG_ACCLIM [334,608] : 0.5000
x EKF2_MAG_B_NOISE [335,609] : 0.0001
x EKF2_MAG_CHECK [336,610] : 1
x + EKF2_MAG_DECL [337,611] : -11.0090
x EKF2_MAG_DELAY [338,612] : 0.0000
x EKF2_MAG_E_NOISE [339,613] : 0.0010
x EKF2_MAG_GATE [340,614] : 3.0000
x EKF2_MAG_NOISE [341,615] : 0.0500
x EKF2_MAG_TYPE [342,616] : 0
x EKF2_MAG_YAWLIM [343,617] : 0.2000
x EKF2_MCOEF [344,618] : 0.1500
x EKF2_MIN_RNG [345,619] : 0.1000
x EKF2_NOAID_NOISE [346,622] : 10.0000
x EKF2_NOAID_TOUT [347,623] : 5000000
x EKF2_OF_CTRL [348,624] : 0
x EKF2_OF_DELAY [349,625] : 20.0000
x EKF2_OF_GATE [350,626] : 3.0000
x EKF2_OF_N_MAX [351,627] : 0.5000
x EKF2_OF_N_MIN [352,628] : 0.1500
x EKF2_OF_POS_X [353,629] : 0.0000
x EKF2_OF_POS_Y [354,630] : 0.0000
x EKF2_OF_POS_Z [355,631] : 0.0000
x EKF2_OF_QMIN [356,632] : 1
x EKF2_PCOEF_XN [357,633] : 0.0000
x EKF2_PCOEF_XP [358,634] : 0.0000
x EKF2_PCOEF_YN [359,635] : 0.0000
x EKF2_PCOEF_YP [360,636] : 0.0000
x EKF2_PCOEF_Z [361,637] : 0.0000
x EKF2_PREDICT_US [362,638] : 10000
x EKF2_REQ_EPH [363,639] : 3.0000
x EKF2_REQ_EPV [364,640] : 5.0000
x + EKF2_REQ_GPS_H [365,641] : 5.0000
x EKF2_REQ_HDRIFT [366,642] : 0.1000
x EKF2_REQ_NSATS [367,643] : 6
x EKF2_REQ_PDOP [368,644] : 2.5000
x + EKF2_REQ_SACC [369,645] : 1.5000
x EKF2_REQ_VDRIFT [370,646] : 0.2000
x EKF2_RNG_A_HMAX [371,647] : 5.0000
x EKF2_RNG_A_IGATE [372,648] : 1.0000
x EKF2_RNG_A_VMAX [373,649] : 1.0000
x + EKF2_RNG_CTRL [374,650] : 0
x EKF2_RNG_DELAY [375,651] : 5.0000
x EKF2_RNG_GATE [376,652] : 5.0000
x EKF2_RNG_K_GATE [377,653] : 1.0000
x EKF2_RNG_NOISE [378,654] : 0.1000
x EKF2_RNG_PITCH [379,655] : 0.0000
x EKF2_RNG_POS_X [380,656] : 0.0000
x EKF2_RNG_POS_Y [381,657] : 0.0000
x EKF2_RNG_POS_Z [382,658] : 0.0000
x EKF2_RNG_QLTY_T [383,659] : 1.0000
x EKF2_RNG_SFE [384,660] : 0.0500
x EKF2_SYNT_MAG_Z [385,666] : 0
x EKF2_TAS_GATE [386,667] : 3.0000
x EKF2_TAU_POS [387,668] : 0.2500
x EKF2_TAU_VEL [388,669] : 0.2500
x EKF2_TERR_GRAD [389,670] : 0.5000
x EKF2_TERR_MASK [390,671] : 3
x EKF2_TERR_NOISE [391,672] : 5.0000
x EKF2_WIND_NSD [392,673] : 0.0100
x FD_ACT_EN [393,679] : 1
x FD_ACT_MOT_C2T [394,680] : 2.0000
x FD_ACT_MOT_THR [395,681] : 0.2000
x FD_ACT_MOT_TOUT [396,682] : 100
x FD_ESCS_EN [397,683] : 1
x FD_EXT_ATS_EN [398,684] : 0
x FD_EXT_ATS_TRIG [399,685] : 1900
x FD_FAIL_P [400,686] : 60
x FD_FAIL_P_TTRI [401,687] : 0.3000
x FD_FAIL_R [402,688] : 60
x FD_FAIL_R_TTRI [403,689] : 0.3000
x FD_IMB_PROP_THR [404,690] : 30
x FLW_TGT_ALT_M [405,691] : 0
x FLW_TGT_DST [406,692] : 8.0000
x FLW_TGT_FA [407,693] : 180.0000
x FLW_TGT_HT [408,694] : 8.0000
x FLW_TGT_MAX_VEL [409,695] : 5.0000
x FLW_TGT_RS [410,696] : 0.1000
x FW_AIRSPD_MAX [411,700] : 20.0000
x FW_AIRSPD_TRIM [412,703] : 15.0000
x FW_ARSP_MODE [413,704] : 0
x FW_PSP_OFF [414,754] : 0.0000
x FW_T_CLMB_R_SP [415,783] : 3.0000
x FW_T_SINK_R_SP [416,792] : 2.0000
x GF_ACTION [417,816] : 2
x GF_ALTMODE [418,817] : 0
x GF_COUNT [419,818] : -1
x GF_MAX_HOR_DIST [420,819] : 0.0000
x GF_MAX_VER_DIST [421,820] : 0.0000
x GF_PREDICT [422,821] : 0
x GF_SOURCE [423,822] : 0
x GND_SPEED_THR_SC [424,833] : 1.0000
x GPIO_CTL_CH [425,840] : 0
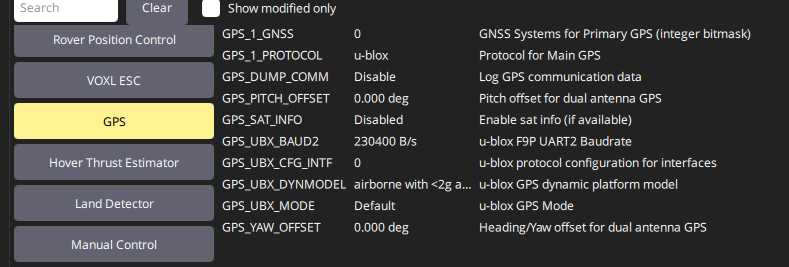
x GPS_1_GNSS [426,841] : 0
x GPS_1_PROTOCOL [427,842] : 1
x GPS_DUMP_COMM [428,845] : 0
x GPS_PITCH_OFFSET [429,846] : 0.0000
x GPS_SAT_INFO [430,847] : 0
x GPS_UBX_BAUD2 [431,848] : 230400
x GPS_UBX_CFG_INTF [432,849] : 0
x GPS_UBX_DYNMODEL [433,850] : 7
x GPS_UBX_MODE [434,851] : 0
x GPS_YAW_OFFSET [435,852] : 0.0000
x HTE_ACC_GATE [436,870] : 3.0000
x HTE_HT_ERR_INIT [437,871] : 0.1000
x HTE_HT_NOISE [438,872] : 0.0036
x HTE_THR_RANGE [439,873] : 0.2000
x HTE_VXY_THR [440,874] : 10.0000
x HTE_VZ_THR [441,875] : 2.0000
x + IMU_ACCEL_CUTOFF [442,876] : 60.0000
x + IMU_DGYRO_CUTOFF [443,877] : 40.0000
x + IMU_GYRO_CUTOFF [444,879] : 80.0000
x IMU_GYRO_DNF_BW [445,880] : 15.0000
x + IMU_GYRO_DNF_EN [446,881] : 1
x IMU_GYRO_DNF_HMC [447,882] : 3
x IMU_GYRO_DNF_MIN [448,883] : 25.0000
x IMU_GYRO_NF0_BW [449,889] : 20.0000
x IMU_GYRO_NF0_FRQ [450,890] : 0.0000
x IMU_GYRO_NF1_BW [451,891] : 20.0000
x IMU_GYRO_NF1_FRQ [452,892] : 0.0000
x + IMU_GYRO_RATEMAX [453,893] : 800
x IMU_INTEG_RATE [454,894] : 200
x LNDMC_ALT_GND [455,916] : 2.0000
x LNDMC_ALT_MAX [456,917] : -1.0000
x + LNDMC_ROT_MAX [457,918] : 30.0000
x + LNDMC_TRIG_TIME [458,919] : 0.5000
x LNDMC_XY_VEL_MAX [459,920] : 1.5000
x LNDMC_Z_VEL_MAX [460,921] : 0.2500
x + LND_FLIGHT_T_HI [461,922] : 6
x + LND_FLIGHT_T_LO [462,923] : -1544484235
x + MAN_ARM_GESTURE [463,974] : 0
x MAV_COMP_ID [464,990] : 1
x MAV_FWDEXTSP [465,991] : 1
x MAV_HASH_CHK_EN [466,992] : 1
x MAV_HB_FORW_EN [467,993] : 1
x MAV_PROTO_VER [468,994] : 0
x MAV_RADIO_TOUT [469,995] : 5
x MAV_SIK_RADIO_ID [470,996] : 0
x MAV_SYS_ID [471,997] : 1
x + MAV_TYPE [472,998] : 2
x MAV_USEHILGPS [473,999] : 0
x MC_ACRO_EXPO [474,1002] : 0.6900
x MC_ACRO_EXPO_Y [475,1003] : 0.6900
x MC_ACRO_P_MAX [476,1004] : 720.0000
x MC_ACRO_R_MAX [477,1005] : 720.0000
x MC_ACRO_SUPEXPO [478,1006] : 0.7000
x MC_ACRO_SUPEXPOY [479,1007] : 0.7000
x MC_ACRO_Y_MAX [480,1008] : 540.0000
x MC_AIRMODE [481,1009] : 0
x MC_AT_APPLY [482,1010] : 1
x MC_AT_AXES [483,1011] : 3
x MC_AT_RISE_TIME [484,1013] : 0.1400
x MC_AT_START [485,1014] : 0
x MC_AT_SYSID_AMP [486,1015] : 0.7000
x MC_BAT_SCALE_EN [487,1016] : 0
x MC_INJECT_AMP [488,1017] : 0.0500
x MC_INJECT_CNT [489,1018] : 12
x MC_INJECT_EN [490,1019] : 0
x MC_INJECT_INC [491,1020] : 1.0000
x MC_INJECT_REST_T [492,1021] : 1.0000
x MC_INJECT_RPY [493,1022] : 2
x MC_INJECT_SINE_T [494,1023] : 5.0000
x MC_INJECT_START [495,1024] : 3.0000
x MC_MAN_TILT_TAU [496,1025] : 0.0000
x MC_ORBIT_RAD_MAX [497,1026] : 1000.0000
x + MC_PITCHRATE_D [498,1027] : 0.0011
x MC_PITCHRATE_FF [499,1028] : 0.0000
x + MC_PITCHRATE_I [500,1029] : 0.0960
x MC_PITCHRATE_K [501,1030] : 1.0000
x + MC_PITCHRATE_MAX [502,1031] : 130.0000
x + MC_PITCHRATE_P [503,1032] : 0.0640
x + MC_PITCH_CUTOFF [504,1033] : 25.0000
x + MC_PITCH_P [505,1034] : 8.0000
x MC_PR_INT_LIM [506,1035] : 0.3000
x + MC_ROLLRATE_D [507,1036] : 0.0013
x MC_ROLLRATE_FF [508,1037] : 0.0000
x + MC_ROLLRATE_I [509,1038] : 0.1000
x MC_ROLLRATE_K [510,1039] : 1.0000
x + MC_ROLLRATE_MAX [511,1040] : 130.0000
x + MC_ROLLRATE_P [512,1041] : 0.0640
x + MC_ROLL_CUTOFF [513,1042] : 25.0000
x + MC_ROLL_P [514,1043] : 8.0000
x MC_RR_INT_LIM [515,1044] : 0.3000
x MC_THR_CURVE_ACR [516,1045] : 0
x MC_YAWRATE_D [517,1046] : 0.0000
x MC_YAWRATE_FF [518,1047] : 0.0000
x + MC_YAWRATE_I [519,1048] : 0.5000
x MC_YAWRATE_K [520,1049] : 1.0000
x + MC_YAWRATE_MAX [521,1050] : 150.0000
x + MC_YAWRATE_P [522,1051] : 0.0700
x + MC_YAW_CUTOFF [523,1052] : 15.0000
x MC_YAW_P [524,1053] : 2.8000
x MC_YAW_WEIGHT [525,1054] : 0.4000
x MC_YR_INT_LIM [526,1055] : 0.3000
x MIS_DIST_1WP [527,1056] : 900.0000
x MIS_LND_ABRT_ALT [528,1057] : 30
x MIS_MNT_YAW_CTL [529,1058] : 0
x MIS_PD_TO [530,1059] : 5.0000
x MIS_TAKEOFF_ALT [531,1060] : 2.5000
x MIS_TKO_LAND_REQ [532,1061] : 0
x MIS_YAW_ERR [533,1062] : 12.0000
x MIS_YAW_TMT [534,1063] : -1.0000
x MODALAI_CONFIG [535,1083] : 0
x MOT_SLEW_MAX [536,1085] : 0.0000
x MPC_ACC_DOWN_MAX [537,1086] : 3.0000
x + MPC_ACC_HOR [538,1087] : 6.0000
x + MPC_ACC_HOR_MAX [539,1088] : 1000.0000
x MPC_ACC_UP_MAX [540,1089] : 4.0000
x MPC_ALT_MODE [541,1090] : 0
x MPC_HOLD_DZ [542,1091] : 0.1000
x + MPC_HOLD_MAX_XY [543,1092] : 0.0000
x + MPC_HOLD_MAX_Z [544,1093] : 0.0000
x MPC_JERK_AUTO [545,1094] : 4.0000
x + MPC_JERK_MAX [546,1095] : 40.0000
x MPC_LAND_ALT1 [547,1096] : 10.0000
x MPC_LAND_ALT2 [548,1097] : 5.0000
x MPC_LAND_ALT3 [549,1098] : 1.0000
x MPC_LAND_CRWL [550,1099] : 0.3000
x MPC_LAND_RADIUS [551,1100] : 1000.0000
x MPC_LAND_RC_HELP [552,1101] : 0
x + MPC_LAND_SPEED [553,1102] : 1.2000
x + MPC_MANTHR_MIN [554,1103] : 0.0400
x + MPC_MAN_TILT_MAX [555,1104] : 45.0000
x MPC_MAN_Y_MAX [556,1105] : 150.0000
x MPC_MAN_Y_TAU [557,1106] : 0.0800
x MPC_POS_MODE [558,1107] : 4
x MPC_THR_CURVE [559,1108] : 0
x + MPC_THR_HOVER [560,1109] : 0.1300
x + MPC_THR_MAX [561,1110] : 0.6000
x + MPC_THR_MIN [562,1111] : 0.0400
x MPC_THR_XY_MARG [563,1112] : 0.3000
x MPC_TILTMAX_AIR [564,1113] : 45.0000
x MPC_TILTMAX_LND [565,1114] : 12.0000
x + MPC_TKO_RAMP_T [566,1115] : 2.0000
x MPC_TKO_SPEED [567,1116] : 1.5000
x MPC_USE_HTE [568,1117] : 1
x MPC_VELD_LP [569,1118] : 5.0000
x + MPC_VEL_MANUAL [570,1119] : 20.0000
x MPC_VEL_MAN_BACK [571,1120] : -1.0000
x MPC_VEL_MAN_SIDE [572,1121] : -1.0000
x + MPC_XY_CRUISE [573,1122] : 15.0000
x MPC_XY_ERR_MAX [574,1123] : 2.0000
x + MPC_XY_MAN_EXPO [575,1124] : 0.4500
x MPC_XY_P [576,1125] : 0.9500
x MPC_XY_TRAJ_P [577,1126] : 0.5000
x MPC_XY_VEL_ALL [578,1127] : -10.0000
x MPC_XY_VEL_D_ACC [579,1128] : 0.2000
x MPC_XY_VEL_I_ACC [580,1129] : 0.4000
x + MPC_XY_VEL_MAX [581,1130] : 20.0000
x MPC_XY_VEL_P_ACC [582,1131] : 1.8000
x MPC_YAWRAUTO_MAX [583,1132] : 45.0000
x + MPC_YAW_EXPO [584,1133] : 0.3000
x MPC_YAW_MODE [585,1134] : 0
x + MPC_Z_MAN_EXPO [586,1135] : 0.1000
x + MPC_Z_P [587,1136] : 5.0000
x MPC_Z_VEL_ALL [588,1137] : -3.0000
x MPC_Z_VEL_D_ACC [589,1138] : 0.0000
x MPC_Z_VEL_I_ACC [590,1139] : 2.0000
x + MPC_Z_VEL_MAX_DN [591,1140] : 4.0000
x + MPC_Z_VEL_MAX_UP [592,1141] : 10.0000
x + MPC_Z_VEL_P_ACC [593,1142] : 8.0000
x + MPC_Z_V_AUTO_DN [594,1143] : 3.0000
x + MPC_Z_V_AUTO_UP [595,1144] : 10.0000
x NAV_ACC_RAD [596,1148] : 10.0000
x NAV_DLL_ACT [597,1149] : 0
x NAV_FORCE_VT [598,1150] : 1
x NAV_FW_ALTL_RAD [599,1151] : 5.0000
x NAV_FW_ALT_RAD [600,1152] : 10.0000
x NAV_LOITER_RAD [601,1153] : 80.0000
x NAV_MC_ALT_RAD [602,1154] : 0.8000
x NAV_MIN_LTR_ALT [603,1155] : -1.0000
x NAV_RCL_ACT [604,1156] : 2
x NAV_TRAFF_AVOID [605,1157] : 1
x NAV_TRAFF_A_HOR [606,1158] : 500.0000
x NAV_TRAFF_A_VER [607,1159] : 500.0000
x NAV_TRAFF_COLL_T [608,1160] : 60
x PLD_BTOUT [609,1215] : 5.0000
x PLD_FAPPR_ALT [610,1216] : 0.1000
x PLD_HACC_RAD [611,1217] : 0.2000
x PLD_MAX_SRCH [612,1218] : 3
x PLD_SRCH_ALT [613,1219] : 10.0000
x PLD_SRCH_TOUT [614,1220] : 10.0000
x RC10_DZ [615,1267] : 0.0000
x RC10_MAX [616,1268] : 2000.0000
x RC10_MIN [617,1269] : 1000.0000
x RC10_REV [618,1270] : 1.0000
x RC10_TRIM [619,1271] : 1500.0000
x RC11_DZ [620,1272] : 0.0000
x RC11_MAX [621,1273] : 2000.0000
x RC11_MIN [622,1274] : 1000.0000
x RC11_REV [623,1275] : 1.0000
x RC11_TRIM [624,1276] : 1500.0000
x RC12_DZ [625,1277] : 0.0000
x RC12_MAX [626,1278] : 2000.0000
x RC12_MIN [627,1279] : 1000.0000
x RC12_REV [628,1280] : 1.0000
x RC12_TRIM [629,1281] : 1500.0000
x RC13_DZ [630,1282] : 0.0000
x RC13_MAX [631,1283] : 2000.0000
x RC13_MIN [632,1284] : 1000.0000
x RC13_REV [633,1285] : 1.0000
x RC13_TRIM [634,1286] : 1500.0000
x RC14_DZ [635,1287] : 0.0000
x RC14_MAX [636,1288] : 2000.0000
x RC14_MIN [637,1289] : 1000.0000
x RC14_REV [638,1290] : 1.0000
x RC14_TRIM [639,1291] : 1500.0000
x RC15_DZ [640,1292] : 0.0000
x RC15_MAX [641,1293] : 2000.0000
x RC15_MIN [642,1294] : 1000.0000
x RC15_REV [643,1295] : 1.0000
x RC15_TRIM [644,1296] : 1500.0000
x RC16_DZ [645,1297] : 0.0000
x RC16_MAX [646,1298] : 2000.0000
x RC16_MIN [647,1299] : 1000.0000
x RC16_REV [648,1300] : 1.0000
x RC16_TRIM [649,1301] : 1500.0000
x RC17_DZ [650,1302] : 0.0000
x RC17_MAX [651,1303] : 2000.0000
x RC17_MIN [652,1304] : 1000.0000
x RC17_REV [653,1305] : 1.0000
x RC17_TRIM [654,1306] : 1500.0000
x RC18_DZ [655,1307] : 0.0000
x RC18_MAX [656,1308] : 2000.0000
x RC18_MIN [657,1309] : 1000.0000
x RC18_REV [658,1310] : 1.0000
x RC18_TRIM [659,1311] : 1500.0000
x RC1_DZ [660,1312] : 10.0000
x + RC1_MAX [661,1313] : 2007.0000
x + RC1_MIN [662,1314] : 989.0000
x RC1_REV [663,1315] : 1.0000
x + RC1_TRIM [664,1316] : 1496.0000
x RC2_DZ [665,1317] : 10.0000
x + RC2_MAX [666,1318] : 2005.0000
x RC2_MIN [667,1319] : 1000.0000
x RC2_REV [668,1320] : 1.0000
x + RC2_TRIM [669,1321] : 1000.0000
x RC3_DZ [670,1322] : 10.0000
x + RC3_MAX [671,1323] : 1972.0000
x + RC3_MIN [672,1324] : 1002.0000
x RC3_REV [673,1325] : 1.0000
x + RC3_TRIM [674,1326] : 1449.0000
x RC4_DZ [675,1327] : 10.0000
x + RC4_MAX [676,1328] : 1993.0000
x + RC4_MIN [677,1329] : 1027.0000
x RC4_REV [678,1330] : 1.0000
x + RC4_TRIM [679,1331] : 1496.0000
x RC5_DZ [680,1332] : 10.0000
x + RC5_MAX [681,1333] : 1980.0000
x + RC5_MIN [682,1334] : 1030.0000
x RC5_REV [683,1335] : 1.0000
x + RC5_TRIM [684,1336] : 1505.0000
x RC6_DZ [685,1337] : 10.0000
x + RC6_MAX [686,1338] : 1980.0000
x + RC6_MIN [687,1339] : 1030.0000
x RC6_REV [688,1340] : 1.0000
x + RC6_TRIM [689,1341] : 1505.0000
x RC7_DZ [690,1342] : 10.0000
x + RC7_MAX [691,1343] : 1980.0000
x + RC7_MIN [692,1344] : 1030.0000
x RC7_REV [693,1345] : 1.0000
x + RC7_TRIM [694,1346] : 1505.0000
x RC8_DZ [695,1347] : 10.0000
x + RC8_MAX [696,1348] : 1980.0000
x + RC8_MIN [697,1349] : 1030.0000
x RC8_REV [698,1350] : 1.0000
x + RC8_TRIM [699,1351] : 1505.0000
x RC9_DZ [700,1352] : 0.0000
x RC9_MAX [701,1353] : 2000.0000
x RC9_MIN [702,1354] : 1000.0000
x RC9_REV [703,1355] : 1.0000
x RC9_TRIM [704,1356] : 1500.0000
x RC_ARMSWITCH_TH [705,1357] : 0.7500
x + RC_CHAN_CNT [706,1358] : 16
x RC_ENG_MOT_TH [707,1360] : 0.7500
x RC_FAILS_THR [708,1361] : 0
x RC_GEAR_TH [709,1362] : 0.7500
x RC_KILLSWITCH_TH [710,1364] : 0.7500
x RC_LOITER_TH [711,1365] : 0.7500
x RC_MAP_ACRO_SW [712,1366] : 0
x + RC_MAP_ARM_SW [713,1367] : 4
x RC_MAP_AUX1 [714,1368] : 0
x RC_MAP_AUX2 [715,1369] : 0
x RC_MAP_AUX3 [716,1370] : 0
x RC_MAP_AUX4 [717,1371] : 0
x RC_MAP_AUX5 [718,1372] : 0
x RC_MAP_AUX6 [719,1373] : 0
x RC_MAP_ENG_MOT [720,1374] : 0
x RC_MAP_FAILSAFE [721,1375] : 0
x RC_MAP_FLAPS [722,1376] : 0
x + RC_MAP_FLTMODE [723,1377] : 6
x RC_MAP_FLTM_BTN [724,1378] : 0
x RC_MAP_GEAR_SW [725,1379] : 0
x + RC_MAP_KILL_SW [726,1380] : 5
x RC_MAP_LOITER_SW [727,1381] : 0
x RC_MAP_MAN_SW [728,1382] : 0
x RC_MAP_MODE_SW [729,1383] : 0
x RC_MAP_OFFB_SW [730,1384] : 0
x RC_MAP_PARAM1 [731,1385] : 0
x RC_MAP_PARAM2 [732,1386] : 0
x RC_MAP_PARAM3 [733,1387] : 0
x + RC_MAP_PITCH [734,1388] : 3
x RC_MAP_POSCTL_SW [735,1389] : 0
x RC_MAP_RATT_SW [736,1390] : 0
x RC_MAP_RETURN_SW [737,1391] : 0
x + RC_MAP_ROLL [738,1392] : 1
x RC_MAP_STAB_SW [739,1393] : 0
x + RC_MAP_THROTTLE [740,1394] : 2
x RC_MAP_TRANS_SW [741,1395] : 0
x + RC_MAP_YAW [742,1396] : 4
x RC_OFFB_TH [743,1397] : 0.7500
x RC_RETURN_TH [744,1398] : 0.7500
x RC_TRANS_TH [745,1402] : 0.7500
x RTL_CONE_ANG [746,1403] : 45
x RTL_DESCEND_ALT [747,1404] : 30.0000
x RTL_HDG_MD [748,1405] : 0
x RTL_LAND_DELAY [749,1406] : 0.0000
x RTL_LOITER_RAD [750,1407] : 80.0000
x RTL_MIN_DIST [751,1408] : 10.0000
x RTL_PLD_MD [752,1409] : 0
x RTL_RETURN_ALT [753,1410] : 60.0000
x RTL_TIME_FACTOR [754,1411] : 1.1000
x RTL_TIME_MARGIN [755,1412] : 100
x RTL_TYPE [756,1413] : 0
x SDLOG_BOOT_BAT [757,1424] : 0
x SDLOG_DIRS_MAX [758,1425] : 0
x SDLOG_MISSION [759,1428] : 0
x SDLOG_MODE [760,1429] : 0
x + SDLOG_PROFILE [761,1430] : 129
x SDLOG_UTC_OFFSET [762,1431] : 0
x SDLOG_UUID [763,1432] : 1
x SENS_BARO_QNH [764,1434] : 1013.2500
x SENS_BARO_RATE [765,1435] : 20.0000
x SENS_BOARD_ROT [766,1436] : 0
x + SENS_BOARD_X_OFF [767,1437] : 1.5968
x + SENS_BOARD_Y_OFF [768,1438] : -0.2765
x SENS_BOARD_Z_OFF [769,1439] : 0.0000
x SENS_DPRES_OFF [770,1442] : 0.0000
x SENS_GPS_MASK [771,1484] : 7
x SENS_GPS_PRIME [772,1485] : 0
x SENS_GPS_TAU [773,1486] : 10.0000
x SENS_IMU_AUTOCAL [774,1487] : 0
x SENS_IMU_MODE [775,1488] : 1
x SENS_MAG_AUTOCAL [776,1494] : 0
x SENS_MAG_AUTOROT [777,1495] : 0
x SENS_MAG_MODE [778,1496] : 1
x SENS_MAG_RATE [779,1497] : 15.0000
x SENS_MAG_SIDES [780,1498] : 63
x SYS_AUTOCONFIG [781,1645] : 0
x + SYS_AUTOSTART [782,1646] : 4001
x SYS_CAL_TDEL [783,1651] : 24
x SYS_CAL_TMAX [784,1652] : 10
x SYS_CAL_TMIN [785,1653] : 5
x SYS_FAC_CAL_MODE [786,1655] : 0
x SYS_FAILURE_EN [787,1656] : 0
x SYS_HAS_BARO [788,1657] : 1
x SYS_HAS_GPS [789,1658] : 1
x SYS_HAS_MAG [790,1659] : 1
x SYS_HAS_NUM_DIST [791,1660] : 0
x SYS_HITL [792,1661] : 0
x SYS_MC_EST_GROUP [793,1662] : 2
x SYS_RGB_MAXBRT [794,1663] : 1.0000
x SYS_STCK_EN [795,1664] : 1
x SYS_VEHICLE_RESP [796,1666] : -0.4000
x TC_A_ENABLE [797,1740] : 0
x + TC_B0_ID [798,1741] : 12018473
x + TC_B0_TMAX [799,1742] : 72.3200
x + TC_B0_TMIN [800,1743] : 61.7500
x + TC_B0_TREF [801,1744] : 67.0300
x + TC_B0_X0 [802,1745] : 0.5761
x + TC_B0_X1 [803,1746] : -2.0090
x TC_B0_X2 [804,1747] : 0.0000
x TC_B0_X3 [805,1748] : 0.0000
x TC_B0_X4 [806,1749] : 0.0000
x TC_B0_X5 [807,1750] : 0.0000
x TC_B1_ID [808,1751] : 0
x TC_B1_TMAX [809,1752] : 75.0000
x TC_B1_TMIN [810,1753] : 5.0000
x TC_B1_TREF [811,1754] : 40.0000
x TC_B1_X0 [812,1755] : 0.0000
x TC_B1_X1 [813,1756] : 0.0000
x TC_B1_X2 [814,1757] : 0.0000
x TC_B1_X3 [815,1758] : 0.0000
x TC_B1_X4 [816,1759] : 0.0000
x TC_B1_X5 [817,1760] : 0.0000
x TC_B2_ID [818,1761] : 0
x TC_B2_TMAX [819,1762] : 75.0000
x TC_B2_TMIN [820,1763] : 5.0000
x TC_B2_TREF [821,1764] : 40.0000
x TC_B2_X0 [822,1765] : 0.0000
x TC_B2_X1 [823,1766] : 0.0000
x TC_B2_X2 [824,1767] : 0.0000
x TC_B2_X3 [825,1768] : 0.0000
x TC_B2_X4 [826,1769] : 0.0000
x TC_B2_X5 [827,1770] : 0.0000
x TC_B3_ID [828,1771] : 0
x TC_B3_TMAX [829,1772] : 75.0000
x TC_B3_TMIN [830,1773] : 5.0000
x TC_B3_TREF [831,1774] : 40.0000
x TC_B3_X0 [832,1775] : 0.0000
x TC_B3_X1 [833,1776] : 0.0000
x TC_B3_X2 [834,1777] : 0.0000
x TC_B3_X3 [835,1778] : 0.0000
x TC_B3_X4 [836,1779] : 0.0000
x TC_B3_X5 [837,1780] : 0.0000
x + TC_B_ENABLE [838,1781] : 1
x TC_G_ENABLE [839,1846] : 0
x + THR_MDL_FAC [840,1866] : 0.9000
x TRIG_MODE [841,1872] : 0
x UAVCAN_ENABLE [842,1913] : 0
x + VOXL_ESC_BAUD [843,2095] : 2000000
x + VOXL_ESC_CONFIG [844,2096] : 1
x + VOXL_ESC_FUNC1 [845,2097] : 102
x + VOXL_ESC_FUNC2 [846,2098] : 103
x + VOXL_ESC_FUNC3 [847,2099] : 101
x + VOXL_ESC_FUNC4 [848,2100] : 104
x VOXL_ESC_MODE [849,2101] : 0
x VOXL_ESC_PUB_BST [850,2102] : 1
x VOXL_ESC_REV [851,2103] : 0
x + VOXL_ESC_RPM_MAX [852,2104] : 12000
x + VOXL_ESC_RPM_MIN [853,2105] : 2000
x VOXL_ESC_SDIR1 [854,2106] : 0
x VOXL_ESC_SDIR2 [855,2107] : 0
x VOXL_ESC_SDIR3 [856,2108] : 0
x VOXL_ESC_SDIR4 [857,2109] : 0
x VOXL_ESC_T_COSP [858,2110] : 0.9900
x VOXL_ESC_T_DEAD [859,2111] : 20
x VOXL_ESC_T_EXPO [860,2112] : 35
x VOXL_ESC_T_MINF [861,2113] : 0.1500
x VOXL_ESC_T_OVER [862,2114] : 0
x VOXL_ESC_T_PERC [863,2115] : 90
x VOXL_ESC_T_WARN [864,2116] : 0
x + VOXL_ESC_VLOG [865,2117] : 1
x VTO_LOITER_ALT [866,2118] : 80.0000
x VT_B_DEC_MSS [867,2123] : 2.0000
x WV_EN [868,2156] : 0
x WV_GAIN [869,2157] : 1.0000
x WV_ROLL_MIN [870,2158] : 1.0000
x WV_YRATE_MAX [871,2159] : 90.0000
x XRCE_DDS_DOM_ID [872,2160] : 0
x XRCE_DDS_KEY [873,2161] : 1874/2162 parameters used.
-
Urgent Support needed for Drone not armed after RC controller calibration@Eric-Katzfey GPS is 0. EKF2_GPS_CHECK is 245 and i cannot update it to 1.
-
Urgent Support needed for Drone not armed after RC controller calibration@Eric-Katzfey Last few steps of the calibration are not sure not which switch to press/toggle for left and right switches on top. That could be the reason 5 through 8 are messed up.
-
Urgent Support needed for Drone not armed after RC controller calibrationI calibrated RC controller via QGRoundControl. I don't see Trim error but there is GPS POS drift too high message and does not take off. Is there a way to reset everything back to factory setting.
Unless someone available on Monday to support his effort over the phone as my team is not expert with the device and the programming parameters. -
Urgent Support needed for Drone not armed after RC controller calibration@Eric-Katzfey Below is the px4 parameters.
voxl2:/$ px4-param show
Symbols: x = used, + = saved, * = unsaved
x ASPD_SCALE_1 [0,23] : 1.0000
x + BAT1_CAPACITY [1,42] : 3950.0000
x + BAT1_N_CELLS [2,45] : 4
x + BAT1_R_INTERNAL [3,46] : 0.0220
x BAT1_SOURCE [4,48] : 0
x + BAT1_V_CHARGED [5,50] : 4.1000
x + BAT1_V_EMPTY [6,52] : 2.8000
x BAT1_V_LOAD_DROP [7,53] : 0.1000
x + BAT_AVRG_CURRENT [8,68] : 3.4000
x + BAT_CRIT_THR [9,69] : 0.1000
x BAT_EMERGEN_THR [10,70] : 0.0500
x BAT_LOW_THR [11,71] : 0.1500
x BAT_N_CELLS [12,72] : 3
x BAT_V_CHARGED [13,73] : 4.0500
x BAT_V_EMPTY [14,74] : 3.6000
x BAT_V_LOAD_DROP [15,75] : 0.3000
x + CAL_ACC0_ID [16,77] : 2490378
x + CAL_ACC0_PRIO [17,78] : 50
x CAL_ACC0_ROT [18,79] : -1
x + CAL_ACC0_XOFF [19,80] : 0.0013
x CAL_ACC0_XSCALE [20,81] : 1.0000
x + CAL_ACC0_YOFF [21,82] : 0.0019
x CAL_ACC0_YSCALE [22,83] : 1.0000
x + CAL_ACC0_ZOFF [23,84] : 0.0507
x CAL_ACC0_ZSCALE [24,85] : 1.0000
x CAL_ACC1_ID [25,86] : 0
x CAL_ACC2_ID [26,95] : 0
x CAL_ACC3_ID [27,104] : 0
x CAL_AIR_CMODEL [28,113] : 0
x CAL_AIR_TUBED_MM [29,114] : 1.5000
x CAL_AIR_TUBELEN [30,115] : 0.2000
x CAL_BARO0_ID [31,116] : 0
x CAL_BARO1_ID [32,119] : 0
x CAL_BARO2_ID [33,122] : 0
x CAL_BARO3_ID [34,125] : 0
x + CAL_GYRO0_ID [35,128] : 2490378
x + CAL_GYRO0_PRIO [36,129] : 50
x CAL_GYRO0_ROT [37,130] : -1
x + CAL_GYRO0_XOFF [38,131] : 0.0010
x + CAL_GYRO0_YOFF [39,132] : 0.0099
x + CAL_GYRO0_ZOFF [40,133] : -0.0099
x CAL_GYRO1_ID [41,134] : 0
x CAL_GYRO2_ID [42,140] : 0
x CAL_GYRO3_ID [43,146] : 0
x + CAL_MAG0_ID [44,152] : 527625
x + CAL_MAG0_PRIO [45,153] : 75
x + CAL_MAG0_ROT [46,154] : 0
x CAL_MAG0_XCOMP [47,155] : 0.0000
x + CAL_MAG0_XODIAG [48,156] : 0.0051
x + CAL_MAG0_XOFF [49,157] : -0.1336
x + CAL_MAG0_XSCALE [50,158] : 0.9732
x CAL_MAG0_YCOMP [51,159] : 0.0000
x + CAL_MAG0_YODIAG [52,160] : -0.0198
x + CAL_MAG0_YOFF [53,161] : -0.2072
x + CAL_MAG0_YSCALE [54,162] : 1.0103
x CAL_MAG0_ZCOMP [55,163] : 0.0000
x + CAL_MAG0_ZODIAG [56,164] : 0.0136
x + CAL_MAG0_ZOFF [57,165] : 0.0588
x + CAL_MAG0_ZSCALE [58,166] : 1.0181
x CAL_MAG1_ID [59,167] : 0
x CAL_MAG1_ROT [60,169] : -1
x CAL_MAG2_ID [61,182] : 0
x CAL_MAG2_ROT [62,184] : -1
x CAL_MAG3_ID [63,197] : 0
x CAL_MAG3_ROT [64,199] : -1
x CAL_MAG_COMP_TYP [65,212] : 0
x CAL_MAG_SIDES [66,213] : 63
x CA_AIRFRAME [67,224] : 0
x CA_FAILURE_MODE [68,225] : 0
x CA_METHOD [69,240] : 2
x CA_R0_SLEW [70,241] : 0.0000
x CA_R10_SLEW [71,242] : 0.0000
x CA_R11_SLEW [72,243] : 0.0000
x CA_R1_SLEW [73,244] : 0.0000
x CA_R2_SLEW [74,245] : 0.0000
x CA_R3_SLEW [75,246] : 0.0000
x CA_R4_SLEW [76,247] : 0.0000
x CA_R5_SLEW [77,248] : 0.0000
x CA_R6_SLEW [78,249] : 0.0000
x CA_R7_SLEW [79,250] : 0.0000
x CA_R8_SLEW [80,251] : 0.0000
x CA_R9_SLEW [81,252] : 0.0000
x CA_ROTOR0_AX [82,253] : 0.0000
x CA_ROTOR0_AY [83,254] : 0.0000
x CA_ROTOR0_AZ [84,255] : -1.0000
x CA_ROTOR0_CT [85,256] : 6.5000
x CA_ROTOR0_KM [86,257] : 0.0500
x + CA_ROTOR0_PX [87,258] : 0.0850
x + CA_ROTOR0_PY [88,259] : 0.0625
x CA_ROTOR0_PZ [89,260] : 0.0000
x CA_ROTOR10_AX [90,262] : 0.0000
x CA_ROTOR10_AY [91,263] : 0.0000
x CA_ROTOR10_AZ [92,264] : -1.0000
x CA_ROTOR10_CT [93,265] : 6.5000
x CA_ROTOR10_KM [94,266] : 0.0500
x CA_ROTOR10_PX [95,267] : 0.0000
x CA_ROTOR10_PY [96,268] : 0.0000
x CA_ROTOR10_PZ [97,269] : 0.0000
x CA_ROTOR11_AX [98,271] : 0.0000
x CA_ROTOR11_AY [99,272] : 0.0000
x CA_ROTOR11_AZ [100,273] : -1.0000
x CA_ROTOR11_CT [101,274] : 6.5000
x CA_ROTOR11_KM [102,275] : 0.0500
x CA_ROTOR11_PX [103,276] : 0.0000
x CA_ROTOR11_PY [104,277] : 0.0000
x CA_ROTOR11_PZ [105,278] : 0.0000
x CA_ROTOR1_AX [106,280] : 0.0000
x CA_ROTOR1_AY [107,281] : 0.0000
x CA_ROTOR1_AZ [108,282] : -1.0000
x CA_ROTOR1_CT [109,283] : 6.5000
x CA_ROTOR1_KM [110,284] : 0.0500
x + CA_ROTOR1_PX [111,285] : -0.0850
x + CA_ROTOR1_PY [112,286] : -0.0625
x CA_ROTOR1_PZ [113,287] : 0.0000
x CA_ROTOR2_AX [114,289] : 0.0000
x CA_ROTOR2_AY [115,290] : 0.0000
x CA_ROTOR2_AZ [116,291] : -1.0000
x CA_ROTOR2_CT [117,292] : 6.5000
x + CA_ROTOR2_KM [118,293] : -0.0500
x + CA_ROTOR2_PX [119,294] : 0.0850
x + CA_ROTOR2_PY [120,295] : -0.0625
x CA_ROTOR2_PZ [121,296] : 0.0000
x CA_ROTOR3_AX [122,298] : 0.0000
x CA_ROTOR3_AY [123,299] : 0.0000
x CA_ROTOR3_AZ [124,300] : -1.0000
x CA_ROTOR3_CT [125,301] : 6.5000
x + CA_ROTOR3_KM [126,302] : -0.0500
x + CA_ROTOR3_PX [127,303] : -0.0850
x + CA_ROTOR3_PY [128,304] : 0.0625
x CA_ROTOR3_PZ [129,305] : 0.0000
x CA_ROTOR4_AX [130,307] : 0.0000
x CA_ROTOR4_AY [131,308] : 0.0000
x CA_ROTOR4_AZ [132,309] : -1.0000
x CA_ROTOR4_CT [133,310] : 6.5000
x CA_ROTOR4_KM [134,311] : 0.0500
x CA_ROTOR4_PX [135,312] : 0.0000
x CA_ROTOR4_PY [136,313] : 0.0000
x CA_ROTOR4_PZ [137,314] : 0.0000
x CA_ROTOR5_AX [138,316] : 0.0000
x CA_ROTOR5_AY [139,317] : 0.0000
x CA_ROTOR5_AZ [140,318] : -1.0000
x CA_ROTOR5_CT [141,319] : 6.5000
x CA_ROTOR5_KM [142,320] : 0.0500
x CA_ROTOR5_PX [143,321] : 0.0000
x CA_ROTOR5_PY [144,322] : 0.0000
x CA_ROTOR5_PZ [145,323] : 0.0000
x CA_ROTOR6_AX [146,325] : 0.0000
x CA_ROTOR6_AY [147,326] : 0.0000
x CA_ROTOR6_AZ [148,327] : -1.0000
x CA_ROTOR6_CT [149,328] : 6.5000
x CA_ROTOR6_KM [150,329] : 0.0500
x CA_ROTOR6_PX [151,330] : 0.0000
x CA_ROTOR6_PY [152,331] : 0.0000
x CA_ROTOR6_PZ [153,332] : 0.0000
x CA_ROTOR7_AX [154,334] : 0.0000
x CA_ROTOR7_AY [155,335] : 0.0000
x CA_ROTOR7_AZ [156,336] : -1.0000
x CA_ROTOR7_CT [157,337] : 6.5000
x CA_ROTOR7_KM [158,338] : 0.0500
x CA_ROTOR7_PX [159,339] : 0.0000
x CA_ROTOR7_PY [160,340] : 0.0000
x CA_ROTOR7_PZ [161,341] : 0.0000
x CA_ROTOR8_AX [162,343] : 0.0000
x CA_ROTOR8_AY [163,344] : 0.0000
x CA_ROTOR8_AZ [164,345] : -1.0000
x CA_ROTOR8_CT [165,346] : 6.5000
x CA_ROTOR8_KM [166,347] : 0.0500
x CA_ROTOR8_PX [167,348] : 0.0000
x CA_ROTOR8_PY [168,349] : 0.0000
x CA_ROTOR8_PZ [169,350] : 0.0000
x CA_ROTOR9_AX [170,352] : 0.0000
x CA_ROTOR9_AY [171,353] : 0.0000
x CA_ROTOR9_AZ [172,354] : -1.0000
x CA_ROTOR9_CT [173,355] : 6.5000
x CA_ROTOR9_KM [174,356] : 0.0500
x CA_ROTOR9_PX [175,357] : 0.0000
x CA_ROTOR9_PY [176,358] : 0.0000
x CA_ROTOR9_PZ [177,359] : 0.0000
x + CA_ROTOR_COUNT [178,361] : 4
x CA_R_REV [179,362] : 0
x CA_SV0_SLEW [180,372] : 0.0000
x CA_SV1_SLEW [181,373] : 0.0000
x CA_SV2_SLEW [182,374] : 0.0000
x CA_SV3_SLEW [183,375] : 0.0000
x CA_SV4_SLEW [184,376] : 0.0000
x CA_SV5_SLEW [185,377] : 0.0000
x CA_SV6_SLEW [186,378] : 0.0000
x CA_SV7_SLEW [187,379] : 0.0000
x CBRK_AIRSPD_CHK [188,454] : 0
x CBRK_FLIGHTTERM [189,456] : 121212
x CBRK_IO_SAFETY [190,457] : 22027
x + CBRK_SUPPLY_CHK [191,458] : 894281
x CBRK_USB_CHK [192,459] : 197848
x CBRK_VTOLARMING [193,460] : 0
x COM_ACT_FAIL_ACT [194,461] : 0
x COM_ARM_ARSP_EN [195,462] : 1
x COM_ARM_AUTH_ID [196,463] : 10
x COM_ARM_AUTH_MET [197,464] : 0
x COM_ARM_AUTH_REQ [198,465] : 0
x COM_ARM_AUTH_TO [199,466] : 1.0000
x COM_ARM_BAD_INOV [200,467] : 0
x COM_ARM_CHK_ESCS [201,468] : 0
x COM_ARM_EKF_BIAS [202,469] : 3.0000
x COM_ARM_EKF_HGT [203,470] : 1.0000
x COM_ARM_EKF_POS [204,471] : 0.5000
x COM_ARM_EKF_VEL [205,472] : 0.5000
x COM_ARM_EKF_YAW [206,473] : 0.5000
x COM_ARM_HFLT_CHK [207,474] : 1
x COM_ARM_IMU_ACC [208,475] : 0.7000
x COM_ARM_IMU_GYR [209,476] : 0.2500
x COM_ARM_MAG_ANG [210,477] : 60
x COM_ARM_MAG_STR [211,478] : 2
x COM_ARM_MIS_REQ [212,479] : 0
x COM_ARM_ODID [213,480] : 0
x + COM_ARM_SDCARD [214,481] : 0
x COM_ARM_SWISBTN [215,482] : 0
x COM_ARM_WO_GPS [216,483] : 1
x + COM_CPU_MAX [217,484] : -1.0000
x COM_DISARM_FORCE [218,485] : 0
x + COM_DISARM_LAND [219,486] : 0.1000
x + COM_DISARM_PRFLT [220,487] : 20.0000
x COM_DL_LOSS_T [221,488] : 10
x COM_FAIL_ACT_T [222,489] : 5.0000
x + COM_FLIGHT_UUID [223,490] : 743
x + COM_FLTMODE1 [224,491] : 0
x COM_FLTMODE2 [225,492] : -1
x + COM_FLTMODE3 [226,493] : 8
x COM_FLTMODE4 [227,494] : -1
x COM_FLTMODE5 [228,495] : -1
x + COM_FLTMODE6 [229,496] : 11
x COM_FLT_PROFILE [230,497] : 0
x COM_FLT_TIME_MAX [231,498] : -1
x COM_FORCE_SAFETY [232,499] : 0
x COM_HLDL_LOSS_T [233,500] : 120
x COM_HLDL_REG_T [234,501] : 0
x COM_HOME_EN [235,502] : 1
x COM_HOME_IN_AIR [236,503] : 0
x COM_IMB_PROP_ACT [237,504] : 0
x + COM_KILL_DISARM [238,505] : 0.0000
x COM_LKDOWN_TKO [239,506] : 3.0000
x COM_LOW_BAT_ACT [240,507] : 0
x COM_MOT_TEST_EN [241,508] : 1
x COM_OBC_LOSS_T [242,509] : 5.0000
x COM_OBL_RC_ACT [243,510] : 0
x COM_OBS_AVOID [244,511] : 0
x COM_OF_LOSS_T [245,512] : 1.0000
x COM_PARACHUTE [246,513] : 0
x COM_POSCTL_NAVL [247,514] : 0
x COM_POS_FS_DELAY [248,515] : 1
x COM_POS_FS_EPH [249,516] : 5.0000
x COM_POS_LOW_EPH [250,517] : -1.0000
x COM_POWER_COUNT [251,518] : 1
x COM_PREARM_MODE [252,519] : 0
x COM_QC_ACT [253,520] : 0
x COM_RCL_EXCEPT [254,521] : 0
x COM_RC_ARM_HYST [255,522] : 1000
x COM_RC_IN_MODE [256,523] : 3
x COM_RC_LOSS_T [257,524] : 0.5000
x COM_RC_OVERRIDE [258,525] : 1
x COM_RC_STICK_OV [259,526] : 30.0000
x + COM_SPOOLUP_TIME [260,527] : 2.0000
x COM_TAKEOFF_ACT [261,528] : 0
x COM_VEL_FS_EVH [262,529] : 1.0000
x COM_WIND_MAX [263,530] : -1.0000
x COM_WIND_WARN [264,531] : -1.0000
x CP_DELAY [265,532] : 0.4000
x CP_DIST [266,533] : -1.0000
x CP_GO_NO_DATA [267,534] : 0
x CP_GUIDE_ANG [268,535] : 30.0000
x EKF2_ABIAS_INIT [269,543] : 0.2000
x EKF2_ABL_ACCLIM [270,544] : 25.0000
x EKF2_ABL_GYRLIM [271,545] : 3.0000
x EKF2_ABL_LIM [272,546] : 0.4000
x EKF2_ABL_TAU [273,547] : 0.5000
x EKF2_ACC_B_NOISE [274,548] : 0.0030
x EKF2_ACC_NOISE [275,549] : 0.3500
x EKF2_AID_MASK [276,550] : 0
x EKF2_ANGERR_INIT [277,551] : 0.1000
x EKF2_ARSP_THR [278,552] : 0.0000
x EKF2_ASPD_MAX [279,553] : 20.0000
x EKF2_ASP_DELAY [280,554] : 100.0000
x EKF2_AVEL_DELAY [281,555] : 5.0000
x EKF2_BARO_CTRL [282,556] : 1
x EKF2_BARO_DELAY [283,557] : 0.0000
x EKF2_BARO_GATE [284,558] : 5.0000
x EKF2_BARO_NOISE [285,559] : 3.5000
x EKF2_BCOEF_X [286,560] : 100.0000
x EKF2_BCOEF_Y [287,561] : 100.0000
x EKF2_BETA_GATE [288,562] : 5.0000
x EKF2_BETA_NOISE [289,563] : 0.3000
x EKF2_DECL_TYPE [290,564] : 7
x EKF2_DRAG_CTRL [291,565] : 0
x EKF2_DRAG_NOISE [292,566] : 2.5000
x EKF2_EAS_NOISE [293,567] : 1.4000
x EKF2_EVA_NOISE [294,568] : 0.1000
x EKF2_EVP_GATE [295,569] : 5.0000
x EKF2_EVP_NOISE [296,570] : 0.1000
x EKF2_EVV_GATE [297,571] : 3.0000
x EKF2_EVV_NOISE [298,572] : 0.1000
x + EKF2_EV_CTRL [299,573] : 0
x EKF2_EV_DELAY [300,574] : 0.0000
x EKF2_EV_HGT_TO [301,575] : 5000
x EKF2_EV_NOISE_MD [302,576] : 0
x EKF2_EV_POS_TO [303,577] : 1000
x EKF2_EV_POS_X [304,578] : 0.0000
x EKF2_EV_POS_Y [305,579] : 0.0000
x EKF2_EV_POS_Z [306,580] : 0.0000
x EKF2_EV_QMIN [307,581] : 0
x EKF2_FUSE_BETA [308,582] : 0
x EKF2_GBIAS_INIT [309,583] : 0.1000
x EKF2_GND_EFF_DZ [310,584] : 4.0000
x EKF2_GND_MAX_HGT [311,585] : 0.5000
x EKF2_GPS_CHECK [312,586] : 245
x EKF2_GPS_CTRL [313,587] : 7
x EKF2_GPS_DELAY [314,588] : 110.0000
x EKF2_GPS_POS_X [315,589] : 0.0000
x EKF2_GPS_POS_Y [316,590] : 0.0000
x EKF2_GPS_POS_Z [317,591] : 0.0000
x EKF2_GPS_P_GATE [318,592] : 5.0000
x EKF2_GPS_P_NOISE [319,593] : 0.5000
x EKF2_GPS_V_GATE [320,594] : 5.0000
x EKF2_GPS_V_NOISE [321,595] : 0.3000
x EKF2_GRAV_NOISE [322,596] : 1.0000
x EKF2_GSF_TAS [323,597] : 15.0000
x EKF2_GYR_B_LIM [324,598] : 0.1500
x EKF2_GYR_B_NOISE [325,599] : 0.0010
x EKF2_GYR_NOISE [326,600] : 0.0150
x EKF2_HDG_GATE [327,601] : 2.6000
x EKF2_HEAD_NOISE [328,602] : 0.3000
x EKF2_HGT_REF [329,603] : 1
x EKF2_IMU_CTRL [330,604] : 3
x + EKF2_IMU_POS_X [331,605] : 0.0050
x + EKF2_IMU_POS_Y [332,606] : 0.0080
x + EKF2_IMU_POS_Z [333,607] : -0.0116
x EKF2_MAG_ACCLIM [334,608] : 0.5000
x EKF2_MAG_B_NOISE [335,609] : 0.0001
x EKF2_MAG_CHECK [336,610] : 1
x + EKF2_MAG_DECL [337,611] : -11.0090
x EKF2_MAG_DELAY [338,612] : 0.0000
x EKF2_MAG_E_NOISE [339,613] : 0.0010
x EKF2_MAG_GATE [340,614] : 3.0000
x EKF2_MAG_NOISE [341,615] : 0.0500
x EKF2_MAG_TYPE [342,616] : 0
x EKF2_MAG_YAWLIM [343,617] : 0.2000
x EKF2_MCOEF [344,618] : 0.1500
x EKF2_MIN_RNG [345,619] : 0.1000
x EKF2_NOAID_NOISE [346,622] : 10.0000
x EKF2_NOAID_TOUT [347,623] : 5000000
x EKF2_OF_CTRL [348,624] : 0
x EKF2_OF_DELAY [349,625] : 20.0000
x EKF2_OF_GATE [350,626] : 3.0000
x EKF2_OF_N_MAX [351,627] : 0.5000
x EKF2_OF_N_MIN [352,628] : 0.1500
x EKF2_OF_POS_X [353,629] : 0.0000
x EKF2_OF_POS_Y [354,630] : 0.0000
x EKF2_OF_POS_Z [355,631] : 0.0000
x EKF2_OF_QMIN [356,632] : 1
x EKF2_PCOEF_XN [357,633] : 0.0000
x EKF2_PCOEF_XP [358,634] : 0.0000
x EKF2_PCOEF_YN [359,635] : 0.0000
x EKF2_PCOEF_YP [360,636] : 0.0000
x EKF2_PCOEF_Z [361,637] : 0.0000
x EKF2_PREDICT_US [362,638] : 10000
x EKF2_REQ_EPH [363,639] : 3.0000
x EKF2_REQ_EPV [364,640] : 5.0000
x + EKF2_REQ_GPS_H [365,641] : 5.0000
x EKF2_REQ_HDRIFT [366,642] : 0.1000
x EKF2_REQ_NSATS [367,643] : 6
x EKF2_REQ_PDOP [368,644] : 2.5000
x + EKF2_REQ_SACC [369,645] : 1.5000
x EKF2_REQ_VDRIFT [370,646] : 0.2000
x EKF2_RNG_A_HMAX [371,647] : 5.0000
x EKF2_RNG_A_IGATE [372,648] : 1.0000
x EKF2_RNG_A_VMAX [373,649] : 1.0000
x + EKF2_RNG_CTRL [374,650] : 0
x EKF2_RNG_DELAY [375,651] : 5.0000
x EKF2_RNG_GATE [376,652] : 5.0000
x EKF2_RNG_K_GATE [377,653] : 1.0000
x EKF2_RNG_NOISE [378,654] : 0.1000
x EKF2_RNG_PITCH [379,655] : 0.0000
x EKF2_RNG_POS_X [380,656] : 0.0000
x EKF2_RNG_POS_Y [381,657] : 0.0000
x EKF2_RNG_POS_Z [382,658] : 0.0000
x EKF2_RNG_QLTY_T [383,659] : 1.0000
x EKF2_RNG_SFE [384,660] : 0.0500
x EKF2_SYNT_MAG_Z [385,666] : 0
x EKF2_TAS_GATE [386,667] : 3.0000
x EKF2_TAU_POS [387,668] : 0.2500
x EKF2_TAU_VEL [388,669] : 0.2500
x EKF2_TERR_GRAD [389,670] : 0.5000
x EKF2_TERR_MASK [390,671] : 3
x EKF2_TERR_NOISE [391,672] : 5.0000
x EKF2_WIND_NSD [392,673] : 0.0100
x FD_ACT_EN [393,679] : 1
x FD_ACT_MOT_C2T [394,680] : 2.0000
x FD_ACT_MOT_THR [395,681] : 0.2000
x FD_ACT_MOT_TOUT [396,682] : 100
x FD_ESCS_EN [397,683] : 1
x FD_EXT_ATS_EN [398,684] : 0
x FD_EXT_ATS_TRIG [399,685] : 1900
x FD_FAIL_P [400,686] : 60
x FD_FAIL_P_TTRI [401,687] : 0.3000
x FD_FAIL_R [402,688] : 60
x FD_FAIL_R_TTRI [403,689] : 0.3000
x FD_IMB_PROP_THR [404,690] : 30
x FLW_TGT_ALT_M [405,691] : 0
x FLW_TGT_DST [406,692] : 8.0000
x FLW_TGT_FA [407,693] : 180.0000
x FLW_TGT_HT [408,694] : 8.0000
x FLW_TGT_MAX_VEL [409,695] : 5.0000
x FLW_TGT_RS [410,696] : 0.1000
x FW_AIRSPD_MAX [411,700] : 20.0000
x FW_AIRSPD_TRIM [412,703] : 15.0000
x FW_ARSP_MODE [413,704] : 0
x FW_PSP_OFF [414,754] : 0.0000
x FW_T_CLMB_R_SP [415,783] : 3.0000
x FW_T_SINK_R_SP [416,792] : 2.0000
x GF_ACTION [417,816] : 2
x GF_ALTMODE [418,817] : 0
x GF_COUNT [419,818] : -1
x GF_MAX_HOR_DIST [420,819] : 0.0000
x GF_MAX_VER_DIST [421,820] : 0.0000
x GF_PREDICT [422,821] : 0
x GF_SOURCE [423,822] : 0
x GND_SPEED_THR_SC [424,833] : 1.0000
x GPIO_CTL_CH [425,840] : 0
x GPS_1_GNSS [426,841] : 0
x GPS_1_PROTOCOL [427,842] : 1
x GPS_DUMP_COMM [428,845] : 0
x GPS_PITCH_OFFSET [429,846] : 0.0000
x GPS_SAT_INFO [430,847] : 0
x GPS_UBX_BAUD2 [431,848] : 230400
x GPS_UBX_CFG_INTF [432,849] : 0
x GPS_UBX_DYNMODEL [433,850] : 7
x GPS_UBX_MODE [434,851] : 0
x GPS_YAW_OFFSET [435,852] : 0.0000
x HTE_ACC_GATE [436,870] : 3.0000
x HTE_HT_ERR_INIT [437,871] : 0.1000
x HTE_HT_NOISE [438,872] : 0.0036
x HTE_THR_RANGE [439,873] : 0.2000
x HTE_VXY_THR [440,874] : 10.0000
x HTE_VZ_THR [441,875] : 2.0000
x + IMU_ACCEL_CUTOFF [442,876] : 60.0000
x + IMU_DGYRO_CUTOFF [443,877] : 40.0000
x + IMU_GYRO_CUTOFF [444,879] : 80.0000
x IMU_GYRO_DNF_BW [445,880] : 15.0000
x + IMU_GYRO_DNF_EN [446,881] : 1
x IMU_GYRO_DNF_HMC [447,882] : 3
x IMU_GYRO_DNF_MIN [448,883] : 25.0000
x IMU_GYRO_NF0_BW [449,889] : 20.0000
x IMU_GYRO_NF0_FRQ [450,890] : 0.0000
x IMU_GYRO_NF1_BW [451,891] : 20.0000
x IMU_GYRO_NF1_FRQ [452,892] : 0.0000
x + IMU_GYRO_RATEMAX [453,893] : 800
x IMU_INTEG_RATE [454,894] : 200
x LNDMC_ALT_GND [455,916] : 2.0000
x LNDMC_ALT_MAX [456,917] : -1.0000
x + LNDMC_ROT_MAX [457,918] : 30.0000
x + LNDMC_TRIG_TIME [458,919] : 0.5000
x LNDMC_XY_VEL_MAX [459,920] : 1.5000
x LNDMC_Z_VEL_MAX [460,921] : 0.2500
x + LND_FLIGHT_T_HI [461,922] : 6
x + LND_FLIGHT_T_LO [462,923] : -1544484235
x + MAN_ARM_GESTURE [463,974] : 0
x MAV_COMP_ID [464,990] : 1
x MAV_FWDEXTSP [465,991] : 1
x MAV_HASH_CHK_EN [466,992] : 1
x MAV_HB_FORW_EN [467,993] : 1
x MAV_PROTO_VER [468,994] : 0
x MAV_RADIO_TOUT [469,995] : 5
x MAV_SIK_RADIO_ID [470,996] : 0
x MAV_SYS_ID [471,997] : 1
x + MAV_TYPE [472,998] : 2
x MAV_USEHILGPS [473,999] : 0
x MC_ACRO_EXPO [474,1002] : 0.6900
x MC_ACRO_EXPO_Y [475,1003] : 0.6900
x MC_ACRO_P_MAX [476,1004] : 720.0000
x MC_ACRO_R_MAX [477,1005] : 720.0000
x MC_ACRO_SUPEXPO [478,1006] : 0.7000
x MC_ACRO_SUPEXPOY [479,1007] : 0.7000
x MC_ACRO_Y_MAX [480,1008] : 540.0000
x MC_AIRMODE [481,1009] : 0
x MC_AT_APPLY [482,1010] : 1
x MC_AT_AXES [483,1011] : 3
x MC_AT_RISE_TIME [484,1013] : 0.1400
x MC_AT_START [485,1014] : 0
x MC_AT_SYSID_AMP [486,1015] : 0.7000
x MC_BAT_SCALE_EN [487,1016] : 0
x MC_INJECT_AMP [488,1017] : 0.0500
x MC_INJECT_CNT [489,1018] : 12
x MC_INJECT_EN [490,1019] : 0
x MC_INJECT_INC [491,1020] : 1.0000
x MC_INJECT_REST_T [492,1021] : 1.0000
x MC_INJECT_RPY [493,1022] : 2
x MC_INJECT_SINE_T [494,1023] : 5.0000
x MC_INJECT_START [495,1024] : 3.0000
x MC_MAN_TILT_TAU [496,1025] : 0.0000
x MC_ORBIT_RAD_MAX [497,1026] : 1000.0000
x + MC_PITCHRATE_D [498,1027] : 0.0011
x MC_PITCHRATE_FF [499,1028] : 0.0000
x + MC_PITCHRATE_I [500,1029] : 0.0960
x MC_PITCHRATE_K [501,1030] : 1.0000
x + MC_PITCHRATE_MAX [502,1031] : 130.0000
x + MC_PITCHRATE_P [503,1032] : 0.0640
x + MC_PITCH_CUTOFF [504,1033] : 25.0000
x + MC_PITCH_P [505,1034] : 8.0000
x MC_PR_INT_LIM [506,1035] : 0.3000
x + MC_ROLLRATE_D [507,1036] : 0.0013
x MC_ROLLRATE_FF [508,1037] : 0.0000
x + MC_ROLLRATE_I [509,1038] : 0.1000
x MC_ROLLRATE_K [510,1039] : 1.0000
x + MC_ROLLRATE_MAX [511,1040] : 130.0000
x + MC_ROLLRATE_P [512,1041] : 0.0640
x + MC_ROLL_CUTOFF [513,1042] : 25.0000
x + MC_ROLL_P [514,1043] : 8.0000
x MC_RR_INT_LIM [515,1044] : 0.3000
x MC_THR_CURVE_ACR [516,1045] : 0
x MC_YAWRATE_D [517,1046] : 0.0000
x MC_YAWRATE_FF [518,1047] : 0.0000
x + MC_YAWRATE_I [519,1048] : 0.5000
x MC_YAWRATE_K [520,1049] : 1.0000
x + MC_YAWRATE_MAX [521,1050] : 150.0000
x + MC_YAWRATE_P [522,1051] : 0.0700
x + MC_YAW_CUTOFF [523,1052] : 15.0000
x MC_YAW_P [524,1053] : 2.8000
x MC_YAW_WEIGHT [525,1054] : 0.4000
x MC_YR_INT_LIM [526,1055] : 0.3000
x MIS_DIST_1WP [527,1056] : 900.0000
x MIS_LND_ABRT_ALT [528,1057] : 30
x MIS_MNT_YAW_CTL [529,1058] : 0
x MIS_PD_TO [530,1059] : 5.0000
x MIS_TAKEOFF_ALT [531,1060] : 2.5000
x MIS_TKO_LAND_REQ [532,1061] : 0
x MIS_YAW_ERR [533,1062] : 12.0000
x MIS_YAW_TMT [534,1063] : -1.0000
x MODALAI_CONFIG [535,1083] : 0
x MOT_SLEW_MAX [536,1085] : 0.0000
x MPC_ACC_DOWN_MAX [537,1086] : 3.0000
x + MPC_ACC_HOR [538,1087] : 6.0000
x + MPC_ACC_HOR_MAX [539,1088] : 1000.0000
x MPC_ACC_UP_MAX [540,1089] : 4.0000
x MPC_ALT_MODE [541,1090] : 0
x MPC_HOLD_DZ [542,1091] : 0.1000
x + MPC_HOLD_MAX_XY [543,1092] : 0.0000
x + MPC_HOLD_MAX_Z [544,1093] : 0.0000
x MPC_JERK_AUTO [545,1094] : 4.0000
x + MPC_JERK_MAX [546,1095] : 40.0000
x MPC_LAND_ALT1 [547,1096] : 10.0000
x MPC_LAND_ALT2 [548,1097] : 5.0000
x MPC_LAND_ALT3 [549,1098] : 1.0000
x MPC_LAND_CRWL [550,1099] : 0.3000
x MPC_LAND_RADIUS [551,1100] : 1000.0000
x MPC_LAND_RC_HELP [552,1101] : 0
x + MPC_LAND_SPEED [553,1102] : 1.2000
x + MPC_MANTHR_MIN [554,1103] : 0.0400
x + MPC_MAN_TILT_MAX [555,1104] : 45.0000
x MPC_MAN_Y_MAX [556,1105] : 150.0000
x MPC_MAN_Y_TAU [557,1106] : 0.0800
x MPC_POS_MODE [558,1107] : 4
x MPC_THR_CURVE [559,1108] : 0
x + MPC_THR_HOVER [560,1109] : 0.1300
x + MPC_THR_MAX [561,1110] : 0.6000
x + MPC_THR_MIN [562,1111] : 0.0400
x MPC_THR_XY_MARG [563,1112] : 0.3000
x MPC_TILTMAX_AIR [564,1113] : 45.0000
x MPC_TILTMAX_LND [565,1114] : 12.0000
x + MPC_TKO_RAMP_T [566,1115] : 2.0000
x MPC_TKO_SPEED [567,1116] : 1.5000
x MPC_USE_HTE [568,1117] : 1
x MPC_VELD_LP [569,1118] : 5.0000
x + MPC_VEL_MANUAL [570,1119] : 20.0000
x MPC_VEL_MAN_BACK [571,1120] : -1.0000
x MPC_VEL_MAN_SIDE [572,1121] : -1.0000
x + MPC_XY_CRUISE [573,1122] : 15.0000
x MPC_XY_ERR_MAX [574,1123] : 2.0000
x + MPC_XY_MAN_EXPO [575,1124] : 0.4500
x MPC_XY_P [576,1125] : 0.9500
x MPC_XY_TRAJ_P [577,1126] : 0.5000
x MPC_XY_VEL_ALL [578,1127] : -10.0000
x MPC_XY_VEL_D_ACC [579,1128] : 0.2000
x MPC_XY_VEL_I_ACC [580,1129] : 0.4000
x + MPC_XY_VEL_MAX [581,1130] : 20.0000
x MPC_XY_VEL_P_ACC [582,1131] : 1.8000
x MPC_YAWRAUTO_MAX [583,1132] : 45.0000
x + MPC_YAW_EXPO [584,1133] : 0.3000
x MPC_YAW_MODE [585,1134] : 0
x + MPC_Z_MAN_EXPO [586,1135] : 0.1000
x + MPC_Z_P [587,1136] : 5.0000
x MPC_Z_VEL_ALL [588,1137] : -3.0000
x MPC_Z_VEL_D_ACC [589,1138] : 0.0000
x MPC_Z_VEL_I_ACC [590,1139] : 2.0000
x + MPC_Z_VEL_MAX_DN [591,1140] : 4.0000
x + MPC_Z_VEL_MAX_UP [592,1141] : 10.0000
x + MPC_Z_VEL_P_ACC [593,1142] : 8.0000
x + MPC_Z_V_AUTO_DN [594,1143] : 3.0000
x + MPC_Z_V_AUTO_UP [595,1144] : 10.0000
x NAV_ACC_RAD [596,1148] : 10.0000
x NAV_DLL_ACT [597,1149] : 0
x NAV_FORCE_VT [598,1150] : 1
x NAV_FW_ALTL_RAD [599,1151] : 5.0000
x NAV_FW_ALT_RAD [600,1152] : 10.0000
x NAV_LOITER_RAD [601,1153] : 80.0000
x NAV_MC_ALT_RAD [602,1154] : 0.8000
x NAV_MIN_LTR_ALT [603,1155] : -1.0000
x NAV_RCL_ACT [604,1156] : 2
x NAV_TRAFF_AVOID [605,1157] : 1
x NAV_TRAFF_A_HOR [606,1158] : 500.0000
x NAV_TRAFF_A_VER [607,1159] : 500.0000
x NAV_TRAFF_COLL_T [608,1160] : 60
x PLD_BTOUT [609,1215] : 5.0000
x PLD_FAPPR_ALT [610,1216] : 0.1000
x PLD_HACC_RAD [611,1217] : 0.2000
x PLD_MAX_SRCH [612,1218] : 3
x PLD_SRCH_ALT [613,1219] : 10.0000
x PLD_SRCH_TOUT [614,1220] : 10.0000
x RC10_DZ [615,1267] : 0.0000
x RC10_MAX [616,1268] : 2000.0000
x RC10_MIN [617,1269] : 1000.0000
x RC10_REV [618,1270] : 1.0000
x RC10_TRIM [619,1271] : 1500.0000
x RC11_DZ [620,1272] : 0.0000
x RC11_MAX [621,1273] : 2000.0000
x RC11_MIN [622,1274] : 1000.0000
x RC11_REV [623,1275] : 1.0000
x RC11_TRIM [624,1276] : 1500.0000
x RC12_DZ [625,1277] : 0.0000
x RC12_MAX [626,1278] : 2000.0000
x RC12_MIN [627,1279] : 1000.0000
x RC12_REV [628,1280] : 1.0000
x RC12_TRIM [629,1281] : 1500.0000
x RC13_DZ [630,1282] : 0.0000
x RC13_MAX [631,1283] : 2000.0000
x RC13_MIN [632,1284] : 1000.0000
x RC13_REV [633,1285] : 1.0000
x RC13_TRIM [634,1286] : 1500.0000
x RC14_DZ [635,1287] : 0.0000
x RC14_MAX [636,1288] : 2000.0000
x RC14_MIN [637,1289] : 1000.0000
x RC14_REV [638,1290] : 1.0000
x RC14_TRIM [639,1291] : 1500.0000
x RC15_DZ [640,1292] : 0.0000
x RC15_MAX [641,1293] : 2000.0000
x RC15_MIN [642,1294] : 1000.0000
x RC15_REV [643,1295] : 1.0000
x RC15_TRIM [644,1296] : 1500.0000
x RC16_DZ [645,1297] : 0.0000
x RC16_MAX [646,1298] : 2000.0000
x RC16_MIN [647,1299] : 1000.0000
x RC16_REV [648,1300] : 1.0000
x RC16_TRIM [649,1301] : 1500.0000
x RC17_DZ [650,1302] : 0.0000
x RC17_MAX [651,1303] : 2000.0000
x RC17_MIN [652,1304] : 1000.0000
x RC17_REV [653,1305] : 1.0000
x RC17_TRIM [654,1306] : 1500.0000
x RC18_DZ [655,1307] : 0.0000
x RC18_MAX [656,1308] : 2000.0000
x RC18_MIN [657,1309] : 1000.0000
x RC18_REV [658,1310] : 1.0000
x RC18_TRIM [659,1311] : 1500.0000
x RC1_DZ [660,1312] : 10.0000
x + RC1_MAX [661,1313] : 2012.0000
x + RC1_MIN [662,1314] : 1004.0000
x RC1_REV [663,1315] : 1.0000
x + RC1_TRIM [664,1316] : 1505.0000
x RC2_DZ [665,1317] : 10.0000
x + RC2_MAX [666,1318] : 2012.0000
x + RC2_MIN [667,1319] : 998.0000
x RC2_REV [668,1320] : 1.0000
x + RC2_TRIM [669,1321] : 1508.0000
x RC3_DZ [670,1322] : 10.0000
x + RC3_MAX [671,1323] : 1971.0000
x + RC3_MIN [672,1324] : 990.0000
x RC3_REV [673,1325] : 1.0000
x + RC3_TRIM [674,1326] : 1365.0000
x RC4_DZ [675,1327] : 10.0000
x + RC4_MAX [676,1328] : 2006.0000
x + RC4_MIN [677,1329] : 1011.0000
x RC4_REV [678,1330] : 1.0000
x + RC4_TRIM [679,1331] : 1505.0000
x RC5_DZ [680,1332] : 10.0000
x + RC5_MAX [681,1333] : 0.0000
x + RC5_MIN [682,1334] : 0.0000
x RC5_REV [683,1335] : 1.0000
x + RC5_TRIM [684,1336] : 1030.0000
x RC6_DZ [685,1337] : 10.0000
x + RC6_MAX [686,1338] : 0.0000
x + RC6_MIN [687,1339] : 0.0000
x RC6_REV [688,1340] : 1.0000
x + RC6_TRIM [689,1341] : 1030.0000
x RC7_DZ [690,1342] : 10.0000
x + RC7_MAX [691,1343] : 0.0000
x + RC7_MIN [692,1344] : 0.0000
x RC7_REV [693,1345] : 1.0000
x + RC7_TRIM [694,1346] : 1030.0000
x RC8_DZ [695,1347] : 10.0000
x + RC8_MAX [696,1348] : 0.0000
x + RC8_MIN [697,1349] : 0.0000
x RC8_REV [698,1350] : 1.0000
x + RC8_TRIM [699,1351] : 1030.0000
x RC9_DZ [700,1352] : 0.0000
x RC9_MAX [701,1353] : 2000.0000
x RC9_MIN [702,1354] : 1000.0000
x RC9_REV [703,1355] : 1.0000
x RC9_TRIM [704,1356] : 1500.0000
x RC_ARMSWITCH_TH [705,1357] : 0.7500
x + RC_CHAN_CNT [706,1358] : 16
x RC_ENG_MOT_TH [707,1360] : 0.7500
x RC_FAILS_THR [708,1361] : 0
x RC_GEAR_TH [709,1362] : 0.7500
x RC_KILLSWITCH_TH [710,1364] : 0.7500
x RC_LOITER_TH [711,1365] : 0.7500
x RC_MAP_ACRO_SW [712,1366] : 0
x + RC_MAP_ARM_SW [713,1367] : 7
x RC_MAP_AUX1 [714,1368] : 0
x RC_MAP_AUX2 [715,1369] : 0
x RC_MAP_AUX3 [716,1370] : 0
x RC_MAP_AUX4 [717,1371] : 0
x RC_MAP_AUX5 [718,1372] : 0
x RC_MAP_AUX6 [719,1373] : 0
x RC_MAP_ENG_MOT [720,1374] : 0
x RC_MAP_FAILSAFE [721,1375] : 0
x RC_MAP_FLAPS [722,1376] : 0
x + RC_MAP_FLTMODE [723,1377] : 6
x RC_MAP_FLTM_BTN [724,1378] : 0
x RC_MAP_GEAR_SW [725,1379] : 0
x + RC_MAP_KILL_SW [726,1380] : 5
x RC_MAP_LOITER_SW [727,1381] : 0
x RC_MAP_MAN_SW [728,1382] : 0
x RC_MAP_MODE_SW [729,1383] : 0
x RC_MAP_OFFB_SW [730,1384] : 0
x RC_MAP_PARAM1 [731,1385] : 0
x RC_MAP_PARAM2 [732,1386] : 0
x RC_MAP_PARAM3 [733,1387] : 0
x + RC_MAP_PITCH [734,1388] : 2
x RC_MAP_POSCTL_SW [735,1389] : 0
x RC_MAP_RATT_SW [736,1390] : 0
x RC_MAP_RETURN_SW [737,1391] : 0
x + RC_MAP_ROLL [738,1392] : 1
x RC_MAP_STAB_SW [739,1393] : 0
x + RC_MAP_THROTTLE [740,1394] : 3
x RC_MAP_TRANS_SW [741,1395] : 0
x + RC_MAP_YAW [742,1396] : 4
x RC_OFFB_TH [743,1397] : 0.7500
x RC_RETURN_TH [744,1398] : 0.7500
x RC_TRANS_TH [745,1402] : 0.7500
x RTL_CONE_ANG [746,1403] : 45
x RTL_DESCEND_ALT [747,1404] : 30.0000
x RTL_HDG_MD [748,1405] : 0
x RTL_LAND_DELAY [749,1406] : 0.0000
x RTL_LOITER_RAD [750,1407] : 80.0000
x RTL_MIN_DIST [751,1408] : 10.0000
x RTL_PLD_MD [752,1409] : 0
x RTL_RETURN_ALT [753,1410] : 60.0000
x RTL_TIME_FACTOR [754,1411] : 1.1000
x RTL_TIME_MARGIN [755,1412] : 100
x RTL_TYPE [756,1413] : 0
x SDLOG_BOOT_BAT [757,1424] : 0
x SDLOG_DIRS_MAX [758,1425] : 0
x SDLOG_MISSION [759,1428] : 0
x SDLOG_MODE [760,1429] : 0
x + SDLOG_PROFILE [761,1430] : 129
x SDLOG_UTC_OFFSET [762,1431] : 0
x SDLOG_UUID [763,1432] : 1
x SENS_BARO_QNH [764,1434] : 1013.2500
x SENS_BARO_RATE [765,1435] : 20.0000
x SENS_BOARD_ROT [766,1436] : 0
x + SENS_BOARD_X_OFF [767,1437] : -0.7805
x + SENS_BOARD_Y_OFF [768,1438] : 0.2225
x SENS_BOARD_Z_OFF [769,1439] : 0.0000
x SENS_DPRES_OFF [770,1442] : 0.0000
x SENS_GPS_MASK [771,1484] : 7
x SENS_GPS_PRIME [772,1485] : 0
x SENS_GPS_TAU [773,1486] : 10.0000
x SENS_IMU_AUTOCAL [774,1487] : 0
x SENS_IMU_MODE [775,1488] : 1
x SENS_MAG_AUTOCAL [776,1494] : 0
x SENS_MAG_AUTOROT [777,1495] : 0
x SENS_MAG_MODE [778,1496] : 1
x SENS_MAG_RATE [779,1497] : 15.0000
x SENS_MAG_SIDES [780,1498] : 63
x SYS_AUTOCONFIG [781,1645] : 0
x + SYS_AUTOSTART [782,1646] : 4001
x SYS_CAL_TDEL [783,1651] : 24
x SYS_CAL_TMAX [784,1652] : 10
x SYS_CAL_TMIN [785,1653] : 5
x SYS_FAC_CAL_MODE [786,1655] : 0
x SYS_FAILURE_EN [787,1656] : 0
x SYS_HAS_BARO [788,1657] : 1
x SYS_HAS_GPS [789,1658] : 1
x SYS_HAS_MAG [790,1659] : 1
x SYS_HAS_NUM_DIST [791,1660] : 0
x SYS_HITL [792,1661] : 0
x SYS_MC_EST_GROUP [793,1662] : 2
x SYS_RGB_MAXBRT [794,1663] : 1.0000
x SYS_STCK_EN [795,1664] : 1
x SYS_VEHICLE_RESP [796,1666] : -0.4000
x TC_A_ENABLE [797,1740] : 0
x + TC_B0_ID [798,1741] : 12018473
x + TC_B0_TMAX [799,1742] : 72.3200
x + TC_B0_TMIN [800,1743] : 61.7500
x + TC_B0_TREF [801,1744] : 67.0300
x + TC_B0_X0 [802,1745] : 0.5761
x + TC_B0_X1 [803,1746] : -2.0090
x TC_B0_X2 [804,1747] : 0.0000
x TC_B0_X3 [805,1748] : 0.0000
x TC_B0_X4 [806,1749] : 0.0000
x TC_B0_X5 [807,1750] : 0.0000
x TC_B1_ID [808,1751] : 0
x TC_B1_TMAX [809,1752] : 75.0000
x TC_B1_TMIN [810,1753] : 5.0000
x TC_B1_TREF [811,1754] : 40.0000
x TC_B1_X0 [812,1755] : 0.0000
x TC_B1_X1 [813,1756] : 0.0000
x TC_B1_X2 [814,1757] : 0.0000
x TC_B1_X3 [815,1758] : 0.0000
x TC_B1_X4 [816,1759] : 0.0000
x TC_B1_X5 [817,1760] : 0.0000
x TC_B2_ID [818,1761] : 0
x TC_B2_TMAX [819,1762] : 75.0000
x TC_B2_TMIN [820,1763] : 5.0000
x TC_B2_TREF [821,1764] : 40.0000
x TC_B2_X0 [822,1765] : 0.0000
x TC_B2_X1 [823,1766] : 0.0000
x TC_B2_X2 [824,1767] : 0.0000
x TC_B2_X3 [825,1768] : 0.0000
x TC_B2_X4 [826,1769] : 0.0000
x TC_B2_X5 [827,1770] : 0.0000
x TC_B3_ID [828,1771] : 0
x TC_B3_TMAX [829,1772] : 75.0000
x TC_B3_TMIN [830,1773] : 5.0000
x TC_B3_TREF [831,1774] : 40.0000
x TC_B3_X0 [832,1775] : 0.0000
x TC_B3_X1 [833,1776] : 0.0000
x TC_B3_X2 [834,1777] : 0.0000
x TC_B3_X3 [835,1778] : 0.0000
x TC_B3_X4 [836,1779] : 0.0000
x TC_B3_X5 [837,1780] : 0.0000
x + TC_B_ENABLE [838,1781] : 1
x TC_G_ENABLE [839,1846] : 0
x + THR_MDL_FAC [840,1866] : 0.9000
x TRIG_MODE [841,1872] : 0
x UAVCAN_ENABLE [842,1913] : 0
x + VOXL_ESC_BAUD [843,2095] : 2000000
x + VOXL_ESC_CONFIG [844,2096] : 1
x + VOXL_ESC_FUNC1 [845,2097] : 102
x + VOXL_ESC_FUNC2 [846,2098] : 103
x + VOXL_ESC_FUNC3 [847,2099] : 101
x + VOXL_ESC_FUNC4 [848,2100] : 104
x VOXL_ESC_MODE [849,2101] : 0
x VOXL_ESC_PUB_BST [850,2102] : 1
x VOXL_ESC_REV [851,2103] : 0
x + VOXL_ESC_RPM_MAX [852,2104] : 12000
x + VOXL_ESC_RPM_MIN [853,2105] : 2000
x VOXL_ESC_SDIR1 [854,2106] : 0
x VOXL_ESC_SDIR2 [855,2107] : 0
x VOXL_ESC_SDIR3 [856,2108] : 0
x VOXL_ESC_SDIR4 [857,2109] : 0
x VOXL_ESC_T_COSP [858,2110] : 0.9900
x VOXL_ESC_T_DEAD [859,2111] : 20
x VOXL_ESC_T_EXPO [860,2112] : 35
x VOXL_ESC_T_MINF [861,2113] : 0.1500
x VOXL_ESC_T_OVER [862,2114] : 0
x VOXL_ESC_T_PERC [863,2115] : 90
x VOXL_ESC_T_WARN [864,2116] : 0
x + VOXL_ESC_VLOG [865,2117] : 1
x VTO_LOITER_ALT [866,2118] : 80.0000
x VT_B_DEC_MSS [867,2123] : 2.0000
x WV_EN [868,2156] : 0
x WV_GAIN [869,2157] : 1.0000
x WV_ROLL_MIN [870,2158] : 1.0000
x WV_YRATE_MAX [871,2159] : 90.0000
x XRCE_DDS_DOM_ID [872,2160] : 0
x XRCE_DDS_KEY [873,2161] : 1874/2162 parameters used.
-
Urgent Support needed for Drone not armed after RC controller calibration@Eric-Katzfey Here is the error from QGroundControl Software?
[15:04:57.827 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:04:57.777 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:04:57.726 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:04:57.677 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:04:57.627 ] Critical: Preflight: GPS Horizontal Pos Error too high
[15:04:57.577 ] Critical: Preflight Fail: horizontal velocity unstable
[15:04:55.808 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:04:55.758 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:04:55.708 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:04:55.659 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:04:55.608 ] Critical: Preflight: GPS Horizontal Pos Error too high
[15:04:55.560 ] Critical: Preflight Fail: horizontal velocity unstable
[15:04:53.810 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:04:53.759 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:04:53.709 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:04:53.661 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:04:53.609 ] Critical: Preflight: GPS Horizontal Pos Error too high
[15:04:53.550 ] Critical: Preflight Fail: horizontal velocity unstable
[15:04:43.460 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:04:43.409 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:04:43.358 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:04:43.309 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:04:43.258 ] Critical: Preflight: GPS Horizontal Pos Error too high
[15:04:43.202 ] Critical: Preflight Fail: horizontal velocity unstable
[15:04:38.277 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:04:38.210 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:04:38.160 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:04:38.110 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:04:38.062 ] Critical: Preflight: GPS Horizontal Pos Error too high
[15:04:38.009 ] Critical: Preflight Fail: horizontal velocity unstable
[15:04:25.981 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:04:25.931 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:04:25.881 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:04:25.832 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:04:25.783 ] Critical: Preflight: GPS Horizontal Pos Error too high
[15:04:25.731 ] Critical: Preflight Fail: horizontal velocity unstable
[15:04:23.955 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:04:23.904 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:04:23.855 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:04:23.803 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:04:23.757 ] Critical: Preflight: GPS Horizontal Pos Error too high
[15:04:23.704 ] Critical: Preflight Fail: horizontal velocity unstable
[15:04:21.871 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:04:21.823 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:04:21.772 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:04:21.723 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:04:21.671 ] Critical: Preflight: GPS Horizontal Pos Error too high
[15:04:19.823 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:04:19.787 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:04:19.730 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:04:19.676 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:04:19.626 ] Critical: Preflight: GPS Horizontal Pos Drift too high
[15:04:19.573 ] Critical: Preflight Fail: horizontal velocity unstable
[15:04:17.816 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:04:17.766 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:04:17.716 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:04:17.665 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:04:17.615 ] Critical: Preflight: GPS Horizontal Pos Drift too high
[15:04:17.562 ] Critical: Preflight Fail: horizontal velocity unstable
[15:04:06.714 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:04:06.661 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:04:06.614 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:04:06.562 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:04:06.514 ] Critical: Preflight: GPS Horizontal Pos Drift too high
[15:04:04.759 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:04:04.753 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:04:04.743 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:04:04.556 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:04:04.508 ] Critical: Preflight: GPS Horizontal Pos Drift too high
[15:04:04.457 ] Critical: Preflight Fail: horizontal velocity unstable
[15:03:55.896 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:55.895 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:55.895 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:55.895 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:55.495 ] Critical: Preflight: GPS Horizontal Pos Drift too high
[15:03:53.675 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:53.619 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:53.574 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:53.539 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:53.472 ] Critical: Preflight: GPS Horizontal Pos Drift too high
[15:03:53.418 ] Critical: Preflight Fail: horizontal velocity unstable
[15:03:49.083 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:49.033 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:48.982 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:48.932 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:48.884 ] Critical: Preflight: GPS Horizontal Pos Drift too high
[15:03:47.064 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:47.014 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:46.963 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:46.928 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:46.863 ] Critical: Preflight: GPS Horizontal Pos Drift too high
[15:03:46.813 ] Critical: Preflight Fail: horizontal velocity unstable
[15:03:45.054 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:45.005 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:44.954 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:44.904 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:44.853 ] Critical: Preflight: GPS Hor Speed Drift too high
[15:03:44.806 ] Critical: Preflight Fail: horizontal velocity unstable
[15:03:43.072 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:43.022 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:42.981 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:42.924 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:42.875 ] Critical: Preflight: GPS Horizontal Pos Drift too high
[15:03:42.822 ] Critical: Preflight Fail: horizontal velocity unstable
[15:03:35.458 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:35.410 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:35.358 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:35.307 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:35.258 ] Critical: Preflight: GPS Horizontal Pos Drift too high
[15:03:33.848 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:33.335 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:33.286 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:33.236 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:33.221 ] Critical: Preflight: GPS Hor Speed Drift too high
[15:03:30.845 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:30.844 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:30.844 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:30.467 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:30.467 ] Critical: Preflight: GPS Vertical Pos Drift too high
[15:03:28.579 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:28.529 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:28.481 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:28.428 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:28.378 ] Critical: Preflight: GPS Vertical Pos Drift too high
[15:03:28.326 ] Critical: Preflight Fail: horizontal velocity unstable
[15:03:26.303 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:26.303 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:26.303 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:26.302 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:26.302 ] Critical: Preflight: GPS Vertical Pos Drift too high
[15:03:22.281 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:22.281 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:22.131 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:22.131 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:22.130 ] Critical: Preflight: GPS Horizontal Pos Drift too high
[15:03:20.530 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:20.530 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:20.530 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:20.530 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:20.530 ] Critical: Preflight: GPS Horizontal Pos Drift too high
[15:03:20.529 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:20.529 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0)
[15:03:20.529 ] Critical: Preflight Fail: RC ERROR: RC6_TRIM > MAX (1030/0)
[15:03:20.528 ] Critical: Preflight Fail: RC ERROR: RC5_TRIM > MAX (1030/0)
[15:03:20.527 ] Critical: Preflight: GPS Horizontal Pos Drift too high
[15:03:20.516 ] Critical: Preflight Fail: horizontal velocity unstable
[15:03:20.516 ] Critical: Preflight Fail: RC ERROR: RC8_TRIM > MAX (1030/0)
[15:03:20.515 ] Critical: Preflight Fail: RC ERROR: RC7_TRIM > MAX (1030/0) -
Urgent Support needed for Drone not armed after RC controller calibration@Eric-Katzfey Do I need Wi-Fi connection for QGroundControl software? currently, i am connected to starling 2 max via USB-cable.
-
Urgent Support needed for Drone not armed after RC controller calibration@Eric-Katzfey Can you share me the instructions how to run RC calibration using QGroundControl? I have QGroundControl software installed.
-
Urgent Support needed for Drone not armed after RC controller calibration@Eric-Katzfey RC calibration was performed via Starling 2 Max web-GUI (192.168.8.1) under debug RC Calibration. This was the first time i ran the RC calibration as the drone was not fly as normal. During RC calibration, it reported as channel 7. Then, i repeated again which reported channel 8 then.
I am available at 443-910-5825 if you are available for a call. -
Urgent Support needed for Drone not armed after RC controller calibrationHello ModalAI support Team!
My team purchased couple RC controller for Starling 2 Max drone as backup. I was able to bind the new controllers to the drone and arm the drone whereas the drone did not take off.
Therefore, i calibrated one of the RC controllers which for reason did not go right resulting the preflight Fail message as below. Now, i can not take off drone with any of the controllers.
Preflight Fail: RC Error:RC8_TRIM>MAX(1030/0).
Can the modalAI support team help resolve the issue?

I am also available at 443-910-5825.
Thanks!Regards,
Ujwal -
How to configure new controller to control starling max 2 drone?Hello there!
My team purchased new backup controller for starling 2 max drone. How can i configure it to work with starling 2 max drone?