@awoods ,
Here is a sample log from one of our recent tests using a Starling platform.
You can review the PX4 log here : https://review.px4.io/plot_app?log=3a4c53fd-db88-4d54-8f2e-5f22e159bfc6
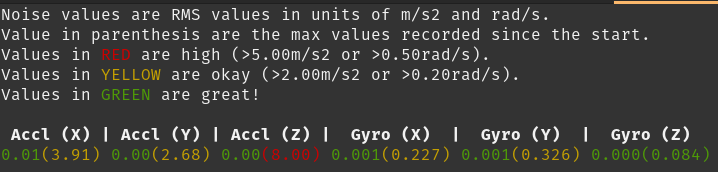
The accelerometer noise looks comparable to yours, perhaps a bit less. The main thing is that motor outputs are pretty clean, very minor oscillations. You can collect a similar log and compare using px4 flight review. Also look at gyro noise which more directly affects motor commands.
[image: 1705697622723-starling_imu_noise_sample.png]