Hello @Ryan-Min,
As far as I know, there is no specific CAD model file for the GPS mast. You should use the complete CAD model of the Starling 2 Max drone, which is available for download in the developer download section. You will need to create an account.
Here is a direct link to the most recent version of the model, the version V3 : D0012-4-V3-C28-M36-T7-K0-Starling2-Max-V3-20260317.step
The latest changes to the model are intended to improve GNSS performance. You can consult the documentation page EMI Mitigation for GNSS Applications for more information on this topic and to see their recommendations.
Q
Latest posts made by qt
-
RE: Starling 2 MAX GPS Mount CAD Modelposted in 3D Models
-
RE: PX4 -> QGC connection through USB for VOXL2posted in Ask your questions right here!
@Alex-Kushleyev
That's not perfect but I created a shell script based on https://docs.modalai.com/qgc-via-adb/ for the drone configuraiton.
For my PC configuration, I created an udev rule to force an interface name since usb0 is renamed in "enx******". My udev rule can only work with my drone (I think). To define IP address, I add a conf file in /etc/systemd/network/
I have only tested on my linux and it works perfectly :#!/usr/bin/env bash set -euo pipefail # See ModalAI doc : https://docs.modalai.com/qgc-via-adb/ UDEV_RULE_DRONE="/etc/udev/rules.d/80-usb-ncm.rules" UDEV_RULE_PC="/etc/udev/rules.d/99-voxl-usb-ncm.rules" SYSTEMD_CONF_PC="/etc/systemd/network/10-voxl0.network" USB_COMP_QUALCOM="/sbin/usb/compositions/901D" # Network configuration USB_IFACE="usb0" USB_NET="192.168.7.0/24" PC_IP="192.168.7.1" DRONE_IP="192.168.7.2" NM_CONN_NAME="voxl-usb-ncm" show_help() { echo "Usage: $0 [--pc] [--drone] [--uninstall]" echo echo "Enable USB NCM networking for ModalAI VOXL / Starling 2 Max" echo echo "Options:" echo " --pc Configure host PC only" echo " --drone Configure drone via adb only" echo " --uninstall Remove configuration" echo " --help Show this help" echo echo "Defaults: if neither --pc nor --drone is provided, both are processed." } do_pc_install() { echo "[INFO][PC] Installing udev rule for VOXL USB NCM" cat > "$UDEV_RULE_PC" <<EOF SUBSYSTEM=="net", ACTION=="add", ATTRS{idVendor}=="05c6", ATTRS{idProduct}=="901d", ATTRS{serial}=="890d035c", NAME="voxl0" EOF echo "[INFO][PC] Creating systemd-networkd config for voxl0" cat > "$SYSTEMD_CONF_PC" <<EOF [Match] Name=voxl0 [Network] Address=${PC_IP}/24 LinkLocalAddressing=no IPv6AcceptRA=no EOF echo "[INFO][PC] Reloading udev rules" udevadm control --reload-rules udevadm trigger echo "[INFO][PC] Restarting systemd-networkd" systemctl restart systemd-networkd echo "[INFO][PC] PC installation complete" } do_pc_uninstall() { echo "[INFO][PC] Removing PC configuration" if [ -f "$UDEV_RULE_PC" ]; then rm -f "$UDEV_RULE_PC" echo "[INFO][PC] Removed udev rule" fi if [ -f "$SYSTEMD_CONF_PC" ]; then rm -f "$SYSTEMD_CONF_PC" echo "[INFO][PC] Removed systemd-networkd config" fi echo "[INFO][PC] Reloading udev rules" udevadm control --reload-rules udevadm trigger echo "[INFO][PC] Restarting systemd-networkd" systemctl restart systemd-networkd echo "[INFO][PC] PC uninstallation complete" } do_drone_install() { echo "[INFO][DRONE] Enabling USB NCM networking on VOXL via adb" adb root adb remount echo "[INFO][DRONE] Updating USB composition in Qualcomm script \ $USB_COMP_QUALCOM configure the usb gadget with \ the addition of the function NCM" echo "[INFO][DRONE] In $USB_COMP_QUALCOM, \ add the line 'ln -s functions/ncm.0 configs/c.1/f3 2>/dev/null | true' \ just after the line 'ln -s functions/ffs.adb configs/c.1/f2'" adb shell "sed -i '/ln -s functions\\/ffs.adb configs\\/c.1\\/f2/a \ \\ ln -s functions\\/ncm.0 configs\\/c.1\\/f3 2>\\/dev\\/null | true' \ $USB_COMP_QUALCOM" echo "[INFO][DRONE] Creating udev rule $UDEV_RULE_DRONE for usb0 with IP ${DRONE_IP}" adb shell "cat << 'EOF' > $UDEV_RULE_DRONE ACTION==\"add\", SUBSYSTEM==\"net\", KERNEL==\"usb0\", \ RUN+=\"/bin/sh -c 'sleep 2; /sbin/ifconfig usb0 ${DRONE_IP} netmask 255.255.255.0 up'\" EOF" echo "[INFO][DRONE] NCM enabled — reboot required" } do_drone_uninstall() { echo "[INFO][DRONE] Removing NCM configuration" adb root adb remount echo "[INFO][DRONE] Removing udev rule $UDEV_RULE_DRONE" adb shell "rm -f $UDEV_RULE_DRONE || true" echo "[INFO][DRONE] Reverting USB composition (901D)" adb shell " sed -i '/ln -s functions\\/ncm.0 configs\\/c.1\\/f3/d' \ $USB_COMP_QUALCOM " echo "[INFO][DRONE] USB NCM configuration removed" echo "[INFO][DRONE] Reboot required to fully apply changes" } # Arg parsing TARGET_PC=false TARGET_DRONE=false DO_UNINSTALL=false for arg in "$@"; do case "$arg" in --help) show_help; exit 0 ;; --pc) TARGET_PC=true ;; --drone) TARGET_DRONE=true ;; --uninstall) DO_UNINSTALL=true ;; *) echo "[ERROR] Unknown argument: $arg"; show_help; exit 1 ;; esac done # Default to both if none selected if ! $TARGET_PC && ! $TARGET_DRONE; then TARGET_PC=true TARGET_DRONE=true fi # Execute if $DO_UNINSTALL; then $TARGET_PC && do_pc_uninstall $TARGET_DRONE && do_drone_uninstall else $TARGET_PC && do_pc_install $TARGET_DRONE && do_drone_install fi echo "[INFO] All done." `` -
RE: Time Of Flight (TOF) camera output FPS divided by 5 after upgrading from SDK 1.5.0 to SDK 1.6.3 (Starling2 Max C29)posted in Support Request Format for Best Results
@Alex-Kushleyev, thank you for your answer.
I confirm your assumption, when I set the decimator to 1, the fps is not divided.
Here are the tests I did on SDK 1.5.0 and SDK 1.6.3 :- test with SDK 1.5.0 ;
fps = 10 | standy_enabled = false or true | decimator = 5 | Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | format | tof_depth | 43200 | 180 | 240 | 2.90 | 0 | 1540 | 28.0 | 10.0 | 3.5 | RAW8 timestamp(ms)| w | h | Zmax | center point (m) (conf) 7170622 | 240 | 180 | 7.1 | -0.0 0.0 0.0 0 fps = 60 | standy_enabled = false or true | decimator = 5 | Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | format | tof_depth | 43200 | 180 | 240 | 1.30 | 0 | 2155 | 9.3 | 59.9 | 20.7 | RAW8 timestamp(ms)| w | h | Zmax | center point (m) (conf) 10666991 | 240 | 180 | 3.1 | 0.0 0.0 0.0 0 fps = 60 | standy_enabled = false or true | decimator = 5 | Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | format | tof_depth | 43200 | 180 | 240 | 1.18 | 0 | 869 | 9.4 | 59.9 | 20.7 | RAW8 timestamp(ms)| w | h | Zmax | center point (m) (conf) 10753813 | 240 | 180 | 3.1 | 0.0 0.0 0.0 0- test with SDK 1.6.3
fps = 10 | standy_enabled = true or false | decimator = 1 | Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | format | tof_depth | 43200 | 180 | 240 | 3.02 | 0 | 260 | 29.7 | 10.0 | 3.5 | RAW8 timestamp(ms)| w | h | Zmax | center point (m) (conf) 2052194 | 240 | 180 | 7.1 | -0.0 0.0 0.0 0 fps = 60 | standy_enabled = true or false | decimator = 1 | Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | format | tof_depth | 43200 | 180 | 240 | 1.18 | 0 | 7532 | 9.3 | 59.9 | 20.7 | RAW8 timestamp(ms)| w | h | Zmax | center point (m) (conf) 2190721 | 240 | 180 | 3.1 | 0.0 0.0 0.0 0 fps = 60 | standy_enabled = true or false | decimator = 10 | Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | format | tof_depth | 43200 | 180 | 240 | 1.20 | 0 | 83 | 10.1 | 6.0 | 2.1 | RAW8 timestamp(ms)| w | h | Zmax | center point (m) (conf) 2469720 | 240 | 180 | 3.1 | 0.0 0.0 0.0 0As you can see, for SDK 1.5.0, fhe fps is NEVER divided, regardless of the value of
standby_enabled.
For SDK 1.6.3, fhe fps is ALWAYS divided, regardless of the value ofstandby_enabled.
So, my problem is solved but I think you have a bug on the management of the paramater 'standby_enabled'.
I fastly investigate the code of voxl-camera-server and I can't find where you are using 'standby_enabled'. Here is the search result in all the project :# Query: standby_en # ContextLines: 2 6 results - 2 files include/common_defs.h: 370 modal_exposure_msv_config_t ae_msv_info; ///< ModalAI AE data (MSV) 371 372: int standby_enabled; ///< Standby enabled for lidar 373 int decimator; ///< Decimator to use for standby 374 src/config_file.cpp: 129 printf(" gain_min : %d\n", cams[i].ae_msv_info.gain_min); 130 printf(" gain_max : %d\n", cams[i].ae_msv_info.gain_max); 131: printf(" standby_enabled: %d\n", cams[i].standby_enabled); 132 printf(" decimator: %d\n", cams[i].decimator); 133 printf(" independent_exposure:%d\n", cams[i].ind_exp); 642 // standby settings for tof only 643 if(is_tof_sensor(cam->type)) { 644: json_fetch_bool_with_default(item, "standby_enabled", (int*)&cam->standby_enabled, cam->standby_enabled); 645 json_fetch_int_with_default (item, "decimator", &cam->decimator, cam->decimator); 646 }Maybe you should add a condition in your function PerCameraMgr::ProcessTOFPreviewFrame():
void PerCameraMgr::ProcessTOFPreviewFrame(mpa_ion_buf_t* buffer_info, camera_image_metadata_t meta) { tofFrameCounter++; if(grab_cpu_pitmode_active() && tofFrameCounter % (int)configInfo.decimator != 0){ return; } auto noStridePlaneSize = static_cast<size_t>(pre_width*pre_height*1.5); auto realWidth = static_cast<uint32_t>(pre_width*1.5); uint8_t* noStridePlane; if (buffer_info->stride != realWidth) { noStridePlane = new uint8_t[noStridePlaneSize]; removePlaneStride(buffer_info->stride, realWidth, buffer_info->height, (uint8_t*) buffer_info->vaddress, noStridePlane); } else { noStridePlane = static_cast<uint8_t*>(buffer_info->vaddress); } uint16_t srcPixel16[pre_width * pre_height] = {0}; // NOTE we don't actually puvblish tis particular metadata to the pipe // TOF data is published separately in a very different way to cameras meta.format = IMAGE_FORMAT_RAW8; meta.size_bytes = pre_width * pre_height; meta.stride = pre_width; Mipi12ToRaw16(meta.size_bytes, noStridePlane, srcPixel16); tof_interface->ProcessRAW16(srcPixel16, meta.timestamp_ns); if (buffer_info->stride != realWidth) { delete[] noStridePlane; } M_VERBOSE("Sent tof data to royale for processing\n"); return; }Best regards
Quentin -
Time Of Flight (TOF) camera output FPS divided by 5 after upgrading from SDK 1.5.0 to SDK 1.6.3 (Starling2 Max C29)posted in Support Request Format for Best Results
I would like to report a probable bug related to the TOF camera on my Starling 2 Max (configuration C29).
I was previously running SDK 1.5.0, and the TOF camera was operating correctly at the frame rate specified in the file "/etc/modalai/voxl-camera-server.conf".
I recently upgraded from SDK 1.5.0 to SDK 1.6.3 (I didn't try other SDK versions).
Since then, the TOF camera runs at a frequency divided by 5. I tested this using the CLI inspection tool with the command "voxl-inspect-cam tof_depth" for different FPS values (same results in VOXL-Portal). I have not changed anything on the drone except the "fps" parameter in the configuration file "/etc/modalai/voxl-camera-server.conf".
Here is my TOF camera configuration:"type": "pmd-tof-liow2", "name": "tof", "enabled": true, "camera_id": 3, "fps": 10, "en_rotate": true, "ae_mode": "off", "gain_min": 0, "gain_max": 0, "exposure_max_us": 6000, "standby_enabled": false, "decimator": 5Here are the results from "voxl-inspect-cam tof_depth" for different FPS values:
fps = 5 | Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | format | tof_depth | 43200 | 180 | 240 | 48.00 | 0 | 26 | 28.1 | 1.0 | 0.3 | RAW8 fps = 10 | Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | format | tof_depth | 43200 | 180 | 240 | 24.00 | 0 | 28 | 27.2 | 2.0 | 0.7 | RAW8 fps = 15 | Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | format | tof_depth | 43200 | 180 | 240 | 16.00 | 0 | 16 | 28.6 | 3.0 | 1.0 | RAW8 fps = 20 | Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | format | tof_depth | 43200 | 180 | 240 | 12.00 | 0 | 21 | 27.8 | 4.0 | 1.4 | RAW8 fpx = 30 | Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | format | tof_depth | 43200 | 180 | 240 | 8.00 | 0 | 13 | 26.8 | 6.0 | 2.1 | RAW8 fps = 60 | Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | format | tof_depth | 43200 | 180 | 240 | 4.00 | 0 | 288 | 10.0 | 12.0 | 4.1 | RAW8 fps = (8, 12, 25, 35, 40, 45, 50, 65, 70, 75, 80, 85, 90, 100, 120, 135, 140, 150, 180) | Pipe Name | bytes | wide | hgt |exp(ms)| gain | frame id |latency(ms)| fps | mbps | format | tof_depth | Server DisconnectedLooking at the code in "src/hal3_camera_mgr.cpp", it seems expected that other frame rates do not work anymore. Here is the relevant section:
if (configInfo.type == SENSOR_TOF){ if (configInfo.fps != 5 && configInfo.fps != 10 && configInfo.fps != 15 && configInfo.fps != 30 && configInfo.fps != 45){ M_ERROR("Invalid TOF framerate: %d, must be either 5, 10, 15, 30, or 45\n", configInfo.fps); return -1; } } if (configInfo.type == SENSOR_TOF_LIOW2){ if (configInfo.fps != 5 && configInfo.fps != 10 && configInfo.fps != 15 && configInfo.fps != 20 && configInfo.fps != 30 && configInfo.fps != 60){ M_ERROR("Invalid TOF framerate: %d, must be either 5, 10, 15, 20, 30, or 60\n", configInfo.fps); return -1; } }Below are the full version details for SDK 1.6.3 (where the issue occurs):
voxl2:~$ voxl-version ──────────────────────────────────────────────────────────────────────────────── system-image: 1.8.06-M0054-14.1a-perf kernel: #1 SMP PREEMPT Wed Oct 22 04:13:18 UTC 2025 4.19.125 ──────────────────────────────────────────────────────────────────────────────── hw platform: M0054 mach.var: 1.0.1 SKU: MRB-D0012-4-V2-C29-T9-M28-X0 ──────────────────────────────────────────────────────────────────────────────── voxl-suite: 1.6.3 ──────────────────────────────────────────────────────────────────────────────── Packages: Repo: http://voxl-packages.modalai.com/ ./dists/qrb5165/sdk-1.6/binary-arm64/ Last Updated: 2026-03-09 17:52:53 List: libfc-sensor 1.0.9 libmodal-cv 0.6.0 libmodal-exposure 0.1.4 libmodal-flow 1.0.3 libmodal-journal 0.2.7 libmodal-json 0.4.8 libmodal-pipe 2.14.11 libqrb5165-io 0.6.3 libvoxl-cci-direct 0.3.3 libvoxl-codec 0.0.2 libvoxl-cutils 0.1.6 modalai-slpi 1.2.2 mv-voxl 0.1-r0 qrb5165-bind 0.1-r0 qrb5165-dfs-server 0.2.0 qrb5165-mini-tof-server 0.2.2 qrb5165-rangefinder-server 0.1.6 qrb5165-slpi-test-sig 01-r0 qrb5165-tflite 2.17.2 voxl-bind-spektrum 0.1.1 voxl-camera-calibration 0.6.1 voxl-camera-server 2.2.19 voxl-cassie-ros2 0.0.1 voxl-ceres-solver 2:2.0.0-2 voxl-configurator 1.1.5 voxl-cpu-monitor 0.7.7 voxl-docker-support 1.3.1 voxl-elrs 1.1.0 voxl-esc 1.5.7 voxl-esptool 0.2.0 voxl-feature-tracker 0.5.2 voxl-flow-server 0.3.6 voxl-gphoto2-server 0.0.10 voxl-imu-server 2.0.1 voxl-io-server 0.0.8 voxl-jpeg-turbo 2.1.3-7 voxl-lepton-server 1.3.3 voxl-lepton-tracker 0.0.4 voxl-libgeographic 1.0.0 voxl-libgphoto2 0.0.4 voxl-libuvc 1.0.7 voxl-logger 0.6.1 voxl-mavcam-manager 0.6.0 voxl-mavlink 0.1.6 voxl-mavlink-server 1.4.14 voxl-microdds-agent 3.0.0-0 voxl-modem 1.2.3 voxl-mongoose 7.19.0 voxl-mpa-to-ros 0.3.9 voxl-mpa-to-ros2 0.0.7 voxl-mpa-tools 1.5.6 voxl-nano-tracker 0.1.7 voxl-open-vins-server 0.6.0 voxl-opencv 4.5.5-3 voxl-osd 0.3.8 voxl-portal 0.8.7 voxl-px4 1.14.0-2.0.133 voxl-px4-params 0.9.0 voxl-qvio-server 1.2.3 voxl-remote-id 0.0.9 voxl-reset-slpi 0.0.1 voxl-ros2-foxy 0.0.1 voxl-state-estimator 0.0.6 voxl-streamer 0.8.0 voxl-suite 1.6.3 voxl-tag-detector 0.1.0 voxl-tflite-server 0.5.1 voxl-utils 2.0.2 voxl-uvc-server 0.1.7 voxl-vision-hub 1.9.21 voxl-vtx 2.0.2 voxl-wavemux 0.0.3 voxl2-io 0.0.3 voxl2-security-hardening-utls 1.0-r0 voxl2-system-image 1.8.06-r0 voxl2-wlan 1.0-r0 ────────────────────────────────────────────────────────────────────────────────Below are the full version details for SDK 1.5.0 (where the TOF camera worked as expected):
──────────────────────────────────────────────────────────────────────────────── system-image: 1.8.04-M0054-14.1a-perf kernel: #1 SMP PREEMPT Mon Mar 24 22:31:58 UTC 2025 4.19.125 ──────────────────────────────────────────────────────────────────────────────── hw platform: M0054 mach.var: 1.0.1 SKU: MRB-D0012-4-V2-C29-T9-M28-X0 ──────────────────────────────────────────────────────────────────────────────── voxl-suite: 1.5.0 ──────────────────────────────────────────────────────────────────────────────── Packages: Repo: http://voxl-packages.modalai.com/ ./dists/qrb5165/sdk-1.5/binary-arm64/ Last Updated: 2026-02-05 12:12:50 List: libfc-sensor 1.0.7 libmodal-cv 0.5.18 libmodal-exposure 0.1.4 libmodal-journal 0.2.6 libmodal-json 0.4.7 libmodal-pipe 2.13.2 libqrb5165-io 0.5.0 libvoxl-cci-direct 0.3.3 libvoxl-cutils 0.1.5 modalai-slpi 1.2.0 mv-voxl 0.1-r0 qrb5165-bind 0.1-r0 qrb5165-dfs-server 0.2.0 qrb5165-imu-server 1.1.3 qrb5165-mini-tof-server 0.2.2 qrb5165-rangefinder-server 0.1.5 qrb5165-slpi-test-sig 01-r0 qrb5165-system-tweaks 0.3.6 qrb5165-tflite 2.8.0-2 voxl-bind-spektrum 0.1.1 voxl-camera-calibration 0.6.0 voxl-camera-server 2.2.4 voxl-cassie-ros2 0.0.1 voxl-ceres-solver 2:1.14.0-10 voxl-configurator 1.0.2 voxl-cpu-monitor 0.6.0 voxl-cross-template 0.0.1 voxl-docker-support 1.3.1 voxl-elrs 0.4.7 voxl-esc 1.5.4 voxl-feature-tracker 0.5.2 voxl-flow-server 0.3.6 voxl-gphoto2-server 0.0.10 voxl-joystick-server 0.0.6 voxl-jpeg-turbo 2.1.3-7 voxl-lepton-server 1.3.3 voxl-lepton-tracker 0.0.4 voxl-libgphoto2 0.0.4 voxl-libuvc 1.0.7 voxl-logger 0.5.3 voxl-mavcam-manager 0.6.0 voxl-mavlink 0.1.5 voxl-mavlink-server 1.4.9 voxl-microdds-agent 3.0.0-0 voxl-modem 1.1.8 voxl-mongoose 7.7.0-2 voxl-mpa-to-ros 0.3.9 voxl-mpa-tools 1.4.0 voxl-open-vins 0.4.19 voxl-open-vins-server 0.3.12 voxl-opencv 4.5.5-3 voxl-osd 0.1.8 voxl-portal 0.7.11 voxl-px4 1.14.0-2.0.105 voxl-px4-params 0.7.5 voxl-qvio-server 1.2.0 voxl-remote-id 0.0.9 voxl-reset-slpi 0.0.1 voxl-ros2-humble 0.0.3 voxl-state-estimator 0.0.5 voxl-streamer 0.7.5 voxl-suite 1.5.0 voxl-tag-detector 0.0.5 voxl-tflite-server 0.4.1 voxl-utils 1.4.8 voxl-uvc-server 0.1.7 voxl-vision-hub 1.8.23 voxl-vtx 1.4.7 voxl-wavemux 0.0.1 voxl2-io 0.0.3 voxl2-system-image 1.8.04-r0 voxl2-wlan 1.0-r0 ────────────────────────────────────────────────────────────────────────────────Between versions 2.2.4 and 2.2.19 of the "voxl-camera-server" repository, I extracted the commits that modified the file "src/hal3_camera_mgr.cpp":
a7f5ea0 | 2025-12-10 | Eric Katzfey | Fixed the rest of the compiler warnings for the qrb5165-2 build aa7b12d | 2025-12-05 | Alex Kushleyev | fix boson buffer pre-allocation size - the extra allocation should only be done in raw preview mode f461dc0 | 2025-11-11 | Tom Martinson | Merge branch 'ar0144-rotate-encoded' into dev 3189b6b | 2025-11-10 | Alex Kushleyev | add option to invert boson output via a command a3ac28e | 2025-11-10 | Tom Martinson | add new ar0144 rotated sensor type bfce3c3 | 2025-11-10 | Alex Kushleyev | move some misp init code from camera mgr to misp 25fe9b6 | 2025-11-10 | Alex Kushleyev | load body to imu extrinsics from file 5289342 | 2025-11-07 | Alex Kushleyev | remove hist ae option; add manual and auto=lme_msv a279e3d | 2025-11-06 | Jacob Camarillo | Remove unused OSD code 51cceec | 2025-11-06 | Alex Kushleyev | fix the neutral point of UV in monochrome YUVs from 127 to 128 for mono images sent to encoder d1a9da8 | 2025-10-30 | Alex Kushleyev | Add an option to rotate AR0144 encoded video 86e1476 | 2025-10-29 | Alex Kushleyev | enable buffer recycling and camera customer register reinit for recovery 2b9816f | 2025-10-29 | Alex Kushleyev | Add boson 14bit support cda94c2 | 2025-10-09 | zauberflote | Enable misp in stereo config eeda888 | 2025-09-25 | Alex Kushleyev | enable rotation of imx412 and imx664 via en_rotate config option. using cci direct to set the readout direction 52643e8 | 2025-09-17 | Alex Kushleyev | fix bayer publish stride; enable publishing bayer images via shared ion buffers 2a2c14d | 2025-09-17 | Alex Kushleyev | Merge branch 'dev' into fix-encoder-dynamic-low-bitrate dd7565a | 2025-09-16 | james | v2.2.7 remove voxl-cpu-monitor as build dependency and some general cleanups a435e8c | 2025-09-08 | Alex Kushleyev | enable low fps to be set dynamically without having it set in the camera config (less than 1.5mbps for h264 and less than 3.0mbps for h265 272fe47 | 2025-09-03 | Alex Kushleyev | add a test colormap for boson using _color stream 1d81a46 | 2025-08-21 | Alex Kushleyev | fix pipe json for AR0144 Color from YUV to RGB 51afcb4 | 2025-08-21 | Alex Kushleyev | only read camera calibration if eis is enabled; add option to disable AWB on individual misp channels; add hooks for using RGB images instead of YUV for AWB 1c3e99e | 2025-08-14 | Alex Kushleyev | add imx214 misp supported resolutions 2390f20 | 2025-07-30 | modaljc | enable boson misp encoded by default instead of boson small encoded 50a27ba | 2025-07-30 | Alex Kushleyev | Merge branch 'dev' of gitlab.com:voxl-public/voxl-sdk/services/voxl-camera-server into dev bbc9b89 | 2025-07-30 | Alex Kushleyev | add boson support to MISP; fix real-time fps control 96c6a0d | 2025-07-22 | james | v2.2.5 fix stereo cam pair going out of sync due to too high of an allowed discrepancy 055e11a | 2025-06-16 | Alex Kushleyev | clean up before merge to dev effc3e8 | 2025-06-12 | Alex Kushleyev | add eis params and minor cleanup@Alex-Kushleyev and modalai team, what can I do to fix that ?
Let me know if you need additional logs or tests.
Thanks in advence -
RE: Poor GPS Fixposted in PX4 Autonomy Developer Kit
Hello everyone,
We’ve been following this discussion with great interest — especially the insights about the mast kit and the copper shielding solution. We also tried similar approaches on our side and wanted to share our results to contribute to the thread.
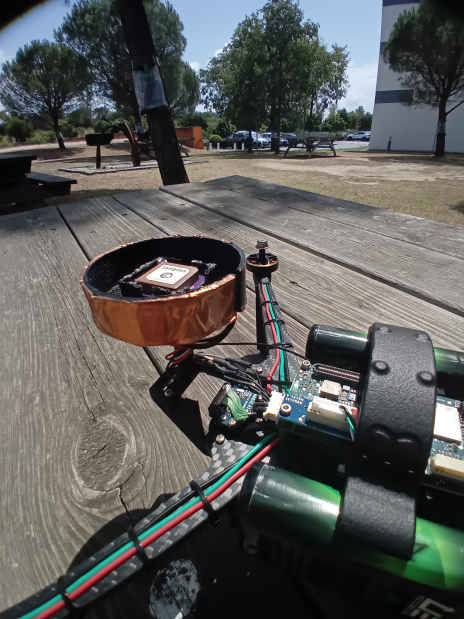
We purchased four Starling 2 Max drones for our project at the beginning of the year, and like others here, we are experiencing difficulties with GPS stability outdoors. To mitigate interference, we designed and 3D-printed our own GPS mount to move the antenna away from the main body, and we added a copper shielding layer around it.
We then tested the u-blox M10 GPS outside, under clear sky conditions, with the drone powered on (connected via Wi-Fi to use VOXL-Portal). Over about 10 minutes, the best observation we captured showed 18 satellites with an average SNR around 30–35 dB.
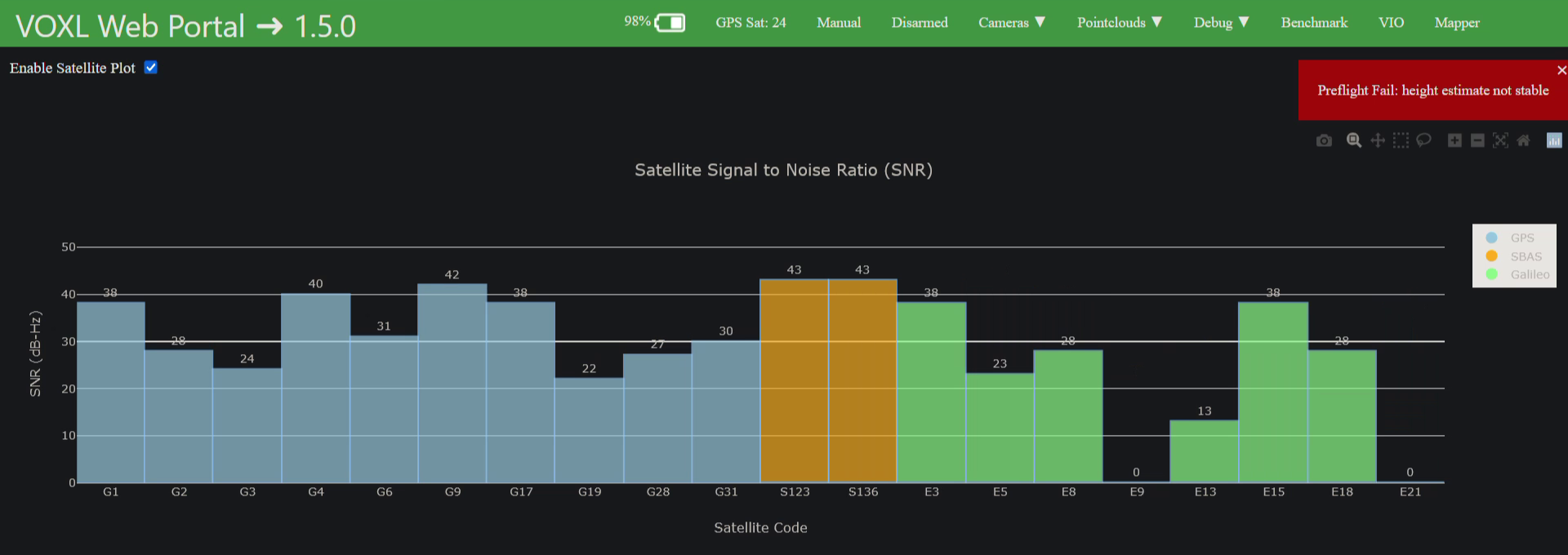
However, despite these results, we still cannot achieve a stable outdoor localization, which currently prevents us from flying the drones properly outside. At this point, we’re unsure whether the problem comes mainly from the GPS performance or possibly from the barometer.
We’d really appreciate:
- Being included in your support list for this GPS issue, since it affects multiple units on our side (as mentioned by @Alex-Kushleyev).
- Any guidance or recommendations on how to debug further (extra shielding, hardware setup, barometer validation, software settings, etc.).
Thanks a lot to the ModalAI team and to the community for the shared ideas — we hope our feedback helps others as well.
Best regards,
Quentin