Overriding in-use UART ports
-
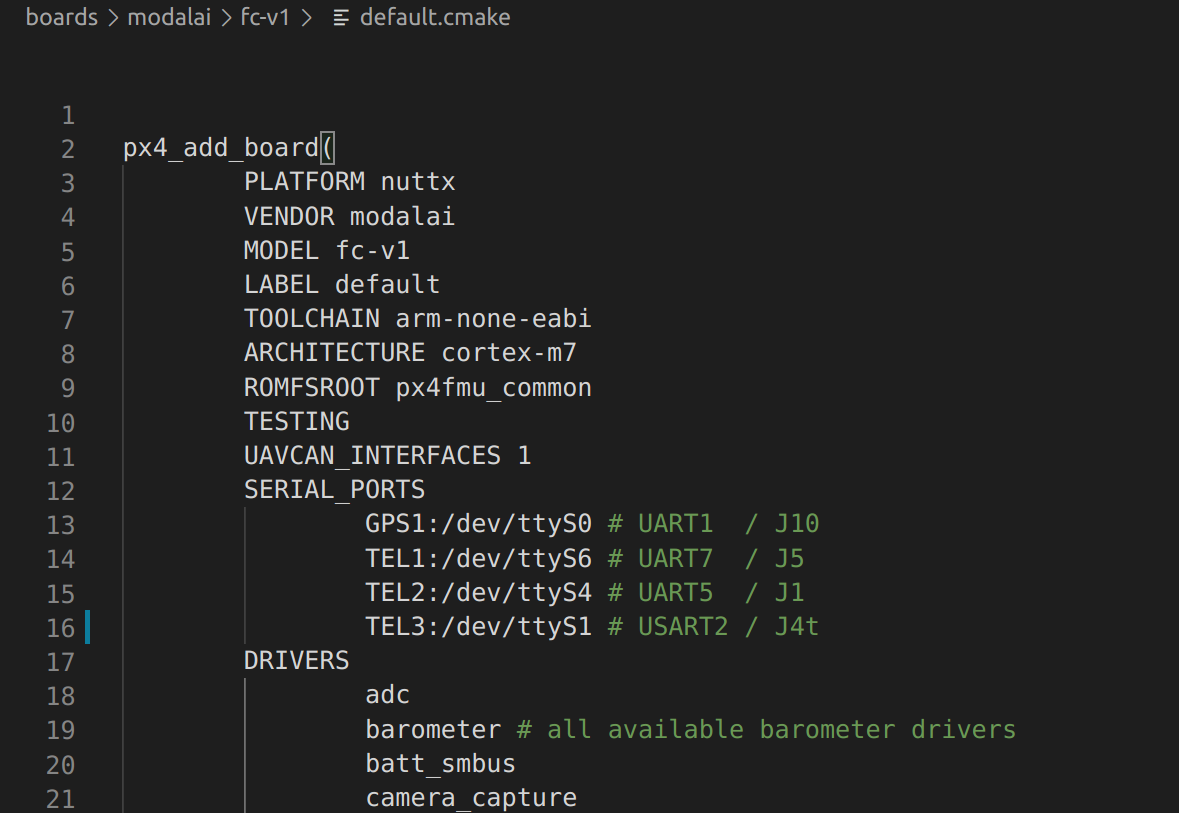
Hi, I would like to use more than 4 UART ports on my Flight Core. Is it possible to override the non-default (GPS1, tel1-3) ports to enable additional serial port usage? For instance, could I use port J6 as an additional TEL4 port, by adding TEL4:/dev/ttyS3 below the TEL3 line?
I am not using this port for battery messages (instead using dshot telemetry) so I could do this if the port configuration is viable, but I'm worried that making this change will screw something up on the FC, so I don't want to try it without asking here first.
Is this possible on this port or any other ports? 5 UART ports would be extremely useful to me.
Thanks,
Gus -
Hi @gus ,
We haven't tried this on all setups, so there might be some gotchas, but it should work. Likely some customization of course, but underneath it is just a UART and you can tweak things.
A (pre released) example of me using this for a UART ESC is in this branch:
https://github.com/modalai/px4-firmware/tree/modalai-1.11Check out this commit:
https://github.com/modalai/px4-firmware/commit/1dfa9feba729a243d60bbaa8fa9f8fcb226404acHere I use /dev/ttyS1 (telem3, USART2, J4) for an interface to our UART ESC.
Lot's of the code in that commit is obviously not applicable, but here's where I'm opening the port:
https://github.com/modalai/px4-firmware/commit/1dfa9feba729a243d60bbaa8fa9f8fcb226404ac#diff-fe5217d5827b686586f293d2c0d790a79d798e206d9932b1d47cd1749280e2d8R56And where I start things up:
https://github.com/modalai/px4-firmware/commit/1dfa9feba729a243d60bbaa8fa9f8fcb226404ac#diff-54ee1de5bd31b9863085c67e1dc867182fa176b992549ba6e25e9f5d57e5625dR9Holler if you have any questions, I wrote that some time back but I don't remember any gotchas.
Thanks!
Travis -
Hi @gus ,
We haven't tried this on all setups, so there might be some gotchas, but it should work. Likely some customization of course, but underneath it is just a UART and you can tweak things.
A (pre released) example of me using this for a UART ESC is in this branch:
https://github.com/modalai/px4-firmware/tree/modalai-1.11Check out this commit:
https://github.com/modalai/px4-firmware/commit/1dfa9feba729a243d60bbaa8fa9f8fcb226404acHere I use /dev/ttyS1 (telem3, USART2, J4) for an interface to our UART ESC.
Lot's of the code in that commit is obviously not applicable, but here's where I'm opening the port:
https://github.com/modalai/px4-firmware/commit/1dfa9feba729a243d60bbaa8fa9f8fcb226404ac#diff-fe5217d5827b686586f293d2c0d790a79d798e206d9932b1d47cd1749280e2d8R56And where I start things up:
https://github.com/modalai/px4-firmware/commit/1dfa9feba729a243d60bbaa8fa9f8fcb226404ac#diff-54ee1de5bd31b9863085c67e1dc867182fa176b992549ba6e25e9f5d57e5625dR9Holler if you have any questions, I wrote that some time back but I don't remember any gotchas.
Thanks!
Travis -
-
@Sem-Andeweg I haven't personally tried, but:
J4 on Flight Core is by default a TELEM3 so should be OK to just use (3.3V TTL) https://docs.modalai.com/flight-core-datasheets-connectors/#j4---uart-esc-uart2telem3
J2 by default is the nuttx shell interface. I have always left this as I use it for debug.... but I believe you could remap it.
There are some limitations on number of MAVLink instances in PX4, but both your use cases above sound like "not MAVLink", so it would be a matter of messing around with the source code a bit.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login