GNSS EMI Mitigation Guidelines
-
Dear ModalAI Community,
We are fully aware that many of our customers have been affected by very poor GNSS performance on the Starling 2 and Starling 2 Max vehicles. We really appreciate everyone's patience and trying to work through the issues and we apologize that it took so long to provide a formal analysis of the issue.
Our team has posted an initial document which captures the results out testing of GNSS performance on Starling 2 and Starling 2 Max vehicles.
Due to the number of components which have at least some effect on GNSS performance, the reported performance results varied across the vehicles due to slight changes in the configuration, such as which components were present / enabled, how many cameras were installed and what resolution / fps they were running and so on.
The actual test results for individual components and plots and videos will be added soon, as the work is still ongoing. Please sign up to receive updates from this thread, if interested in staying up-to-date.
Please note that most of the cameras on these vehicles had quite severe effect on the GNSS signal. In some cases, the solution is as simple as disabling the camera (like TOF, which mostly not usable outdoors, but was till running and causing interference). One big item remains is the IMX412 camera(s), which is core component of outdoor video streaming, but causes significant interference (up to 15dB loss!). We will be working on testing the camera settings to reduce this interference (as soon as possible).
The Starling 2 and Starling 2 Max vehicles are no longer advertised as GNSS-capable, although they may still ship with GNSS receivers installed (you can request it, if needed). A new GNSS receiver mast has been designed for the Starling 2 Max V3 (late fall of 2025) and is available in CAD (easy to 3D print).
Nevertheless, we believe that it is possible to make substantial improvements in GNSS performance without significant mechanical changes.
We hope the details provided in the document, as well as the ways of testing different components, will allow our customers to tailor modifications to their specific application.
We will be considering these findings for our future designs, however the current Starling 2 and Starling 2 Max vehicle design will remain mostly unchanged in the near future.
Those who are interested in improving GNSS performance in their existing vehicles are strongly encouraged to read through the document and implement the suggestions. Feel free to ask specific questions about anything related to this topic in this thread.
As the document is updated, we will share any major findings in this thread as well.

EMI Mitigation for GNSS Applications
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
- ModalAI Team
-
A Alex Kushleyev referenced this topic on
-
-
-
-
-
Dear ModalAI Community,
We are fully aware that many of our customers have been affected by very poor GNSS performance on the Starling 2 and Starling 2 Max vehicles. We really appreciate everyone's patience and trying to work through the issues and we apologize that it took so long to provide a formal analysis of the issue.
Our team has posted an initial document which captures the results out testing of GNSS performance on Starling 2 and Starling 2 Max vehicles.
Due to the number of components which have at least some effect on GNSS performance, the reported performance results varied across the vehicles due to slight changes in the configuration, such as which components were present / enabled, how many cameras were installed and what resolution / fps they were running and so on.
The actual test results for individual components and plots and videos will be added soon, as the work is still ongoing. Please sign up to receive updates from this thread, if interested in staying up-to-date.
Please note that most of the cameras on these vehicles had quite severe effect on the GNSS signal. In some cases, the solution is as simple as disabling the camera (like TOF, which mostly not usable outdoors, but was till running and causing interference). One big item remains is the IMX412 camera(s), which is core component of outdoor video streaming, but causes significant interference (up to 15dB loss!). We will be working on testing the camera settings to reduce this interference (as soon as possible).
The Starling 2 and Starling 2 Max vehicles are no longer advertised as GNSS-capable, although they may still ship with GNSS receivers installed (you can request it, if needed). A new GNSS receiver mast has been designed for the Starling 2 Max V3 (late fall of 2025) and is available in CAD (easy to 3D print).
Nevertheless, we believe that it is possible to make substantial improvements in GNSS performance without significant mechanical changes.
We hope the details provided in the document, as well as the ways of testing different components, will allow our customers to tailor modifications to their specific application.
We will be considering these findings for our future designs, however the current Starling 2 and Starling 2 Max vehicle design will remain mostly unchanged in the near future.
Those who are interested in improving GNSS performance in their existing vehicles are strongly encouraged to read through the document and implement the suggestions. Feel free to ask specific questions about anything related to this topic in this thread.
As the document is updated, we will share any major findings in this thread as well.
EMI Mitigation for GNSS Applications
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
- ModalAI Team
For those who are tracking this issue.. We have some interesting updates with respect to the interference from IMX412 camera. As it has been previously documented, the IMX412 camera(s) on Starling 2 and Starling 2 Max are causing interference as soon as the streaming is enabled (there are clients to the streams that camera server offers for those cameras).
IMX412 camera has several internal clocks, which are generated from the 24 Mhz base frequency that is fed from Voxl2 to all cameras. These clocks are configured during the camera initialization phase - the settings are contained within the imx412 sensormodule files.
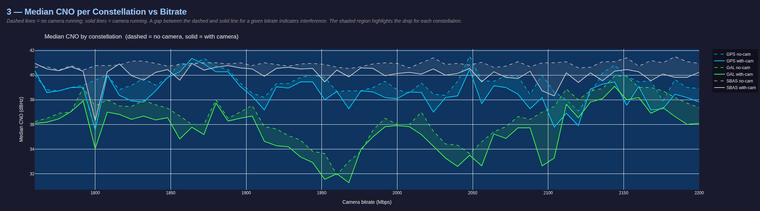
We were able to perform some parameter sweeps - specifically varying only the output MIPI bitrate, while keeping all other settings the same (gain, exposure, fps).
The test was set up as follows:
- generate imx412 sensormodule drivers for desired frequency range (1200-2100)
- all tests use the same camera resolution 3840x2160 at 45FPS
- higher fps = more interference
- tried to have a relatively large frequency range while keeping the fps high (low mipi rates cannot support high fps), so 45fps was a good compromise
- repeat for each frequency
- copy appropriate sensormodules (for specific frequency) into
/usr/lib/camera/ - log baseline satellite signal strengths for all satellites 10 seconds -- this allows the experiment to not depend on any initial SNR captures at the beginning of the test, since SNR can change relatively quickly due to the environmental factors
- start
voxl-camera-serverandvoxl-inspect-cam hires_front_misp_color hires_down_misp_colorand wait for 3 seconds - collect satellite SNRs for 10 seconds while the cameras are streaming
- stop voxl-camera-server
- wait for 3 seconds and repeat the loop for the next frequency
- copy appropriate sensormodules (for specific frequency) into
After data has been collected, analyze the logs and generate plots.
The tests were done outdoors using Starling 2 Max with original GPS receiver + V3 GPS mast and 75mm FR4 (with copper) circular plate under the receiver. Full Sun light and exposure was set to 0.1ms, gain to 100 (1.0x). During testing it was discovered that the most interference was present when the image was darker than normal (under-exposed) -- probably related to specifics of the MIPI packets that are causing the interference.
Note that the default IMX412 MIPI bitrate was set to the maximum that the camera officially supports, which is 2100Mbps.
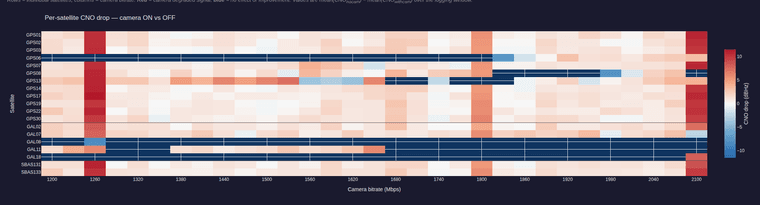
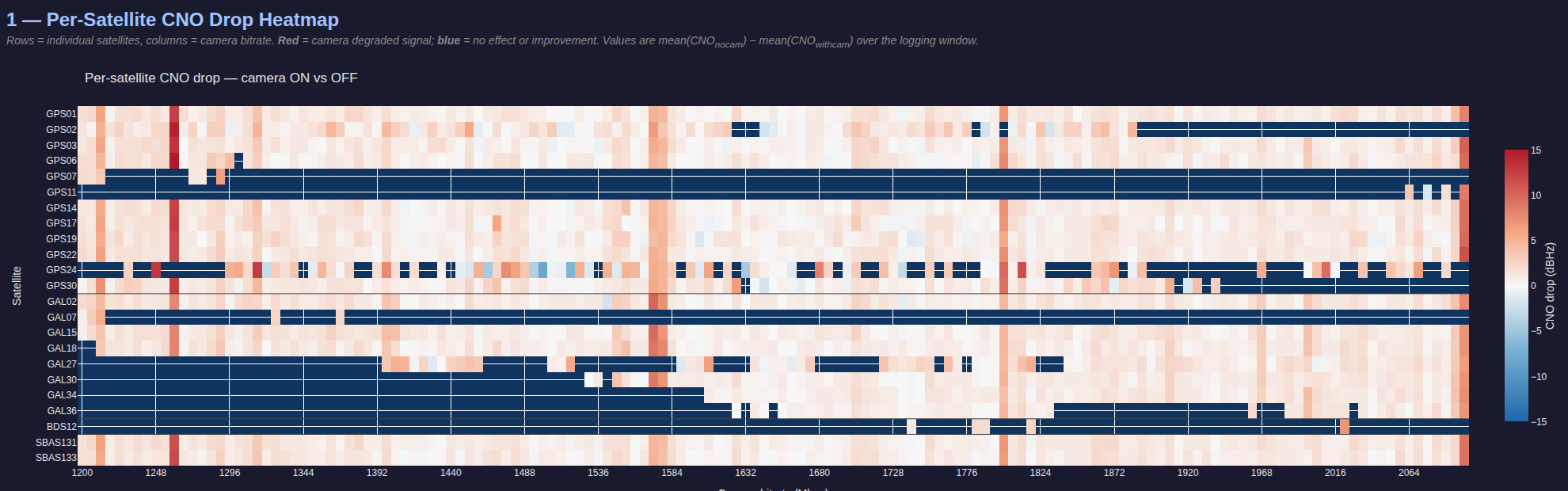
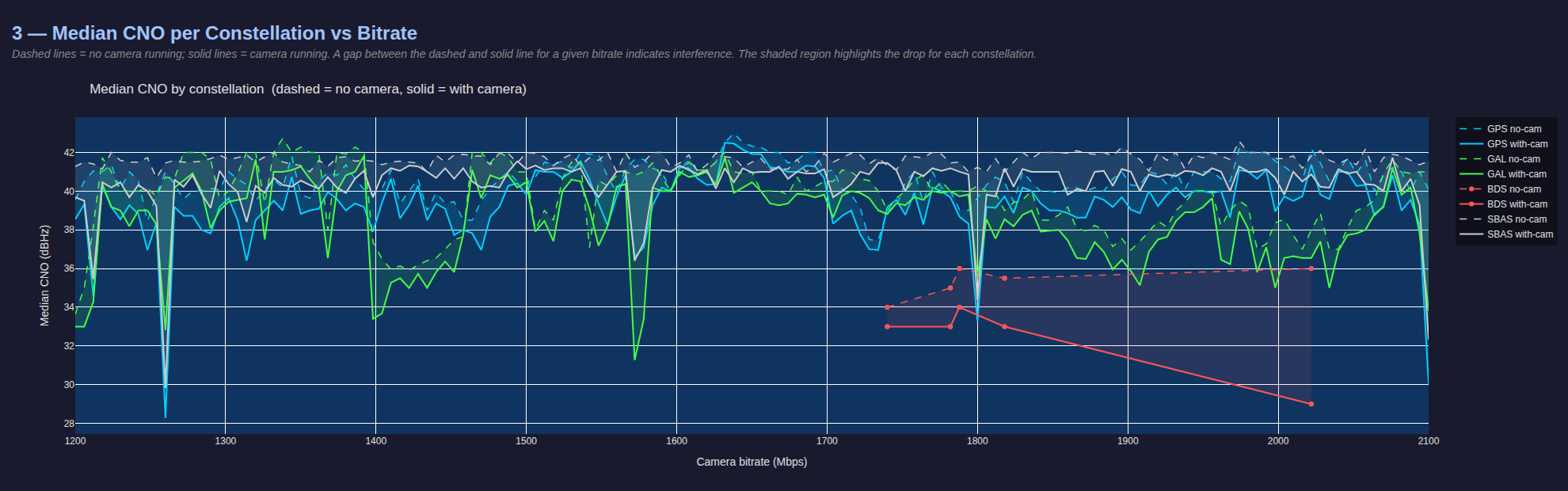
As the plots show, there are several peaks where the satellite SNRs drop by 10-15dB, as initially noted in the overall system testing. Additionally, 2100Mbps is one of the worst frequencies to use, based on this data.
As a result of testing, the following frequencies were identified as causing significant interference with GPS L1 band:
- 1212Mhz
- 1260Mhz
- 1572-1578 Mhz (L1 band!!)
- 1800Mhz
- 2100Mhz
We will be releasing updated IMX412 drivers very shortly to avoid using 2100Mhz frequency.
There results below show 3 tests:
- 1200-2100 Mhz sweep with steps of 30Mhz
- 1200-2100 Mhz sweep with steps of 6Mhz
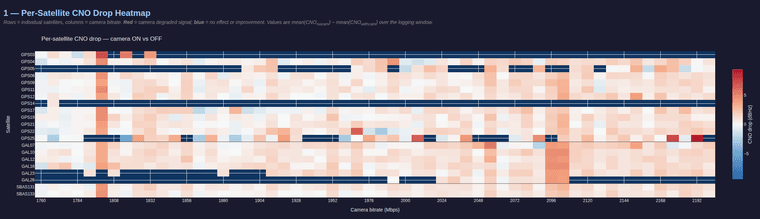
- 1760-2200 Mhz sweep with steps of 8Mhz (focusing on the upper range, slightly different PLL configuration)
1200-2100 Mhz sweep with steps of 30Mhz
1200-2100 Mhz sweep with steps of 6Mhz
1760-2200 Mhz sweep with steps of 8Mhz
-
-
Can you post the changes required for the /usr/lib/camera sensormodules to reduce the EMI?
I have just posted the drivers for testing here : https://storage.googleapis.com/modalai_public/temp/imx412_test_bins/20260529/imx412_drivers_20260529.zip
These have the mipi bit rate adjusted slightly from 2100Mbps to 2088Mbps as the latter has shown very little interference based on the prior tests.
These drivers have the following resolutions / modes -- note that two modes use higher bitrate (2200Mbps) in order to achieve the required throughput -- 2200 also seems safe.
Mbps: 2088, 4056x3040, 30.0 fps Mbps: 2088, 4040x3040, 30.0 fps Mbps: 2200, 4040x3040, 60.0 fps Mbps: 2088, 3840x2160, 30.0 fps Mbps: 2088, 3840x2160, 60.0 fps Mbps: 2200, 3840x2160, 80.0 fps Mbps: 2088, 2028x1520, 30.0 fps Mbps: 2088, 1996x1520, 30.0 fps Mbps: 2088, 1996x1520, 60.0 fps Mbps: 2088, 1996x1520, 120.0 fps Mbps: 2088, 1936x1080, 30.0 fps Mbps: 2088, 1936x1080, 60.0 fps Mbps: 2088, 1936x1080, 90.0 fps Mbps: 2088, 1936x1080, 120.0 fps Mbps: 2200, 1936x1080, 240.0 fps Mbps: 2088, 1920x1080, 30.0 fps Mbps: 2088, 1920x1080, 60.0 fps Mbps: 2088, 1920x1080, 90.0 fps Mbps: 2088, 1920x1080, 120.0 fpsIn order to allow the system to use all the modes, please double check that the following setting is set correctly in
/vendor/etc/camera/camxoverridesettings.txt:maxRAWSizes=20We will be doing more testing but most likely these updated drivers will become the official ones in an upcoming SDK release.
Alex
-
I have just posted the drivers for testing here : https://storage.googleapis.com/modalai_public/temp/imx412_test_bins/20260529/imx412_drivers_20260529.zip
These have the mipi bit rate adjusted slightly from 2100Mbps to 2088Mbps as the latter has shown very little interference based on the prior tests.
These drivers have the following resolutions / modes -- note that two modes use higher bitrate (2200Mbps) in order to achieve the required throughput -- 2200 also seems safe.
Mbps: 2088, 4056x3040, 30.0 fps Mbps: 2088, 4040x3040, 30.0 fps Mbps: 2200, 4040x3040, 60.0 fps Mbps: 2088, 3840x2160, 30.0 fps Mbps: 2088, 3840x2160, 60.0 fps Mbps: 2200, 3840x2160, 80.0 fps Mbps: 2088, 2028x1520, 30.0 fps Mbps: 2088, 1996x1520, 30.0 fps Mbps: 2088, 1996x1520, 60.0 fps Mbps: 2088, 1996x1520, 120.0 fps Mbps: 2088, 1936x1080, 30.0 fps Mbps: 2088, 1936x1080, 60.0 fps Mbps: 2088, 1936x1080, 90.0 fps Mbps: 2088, 1936x1080, 120.0 fps Mbps: 2200, 1936x1080, 240.0 fps Mbps: 2088, 1920x1080, 30.0 fps Mbps: 2088, 1920x1080, 60.0 fps Mbps: 2088, 1920x1080, 90.0 fps Mbps: 2088, 1920x1080, 120.0 fpsIn order to allow the system to use all the modes, please double check that the following setting is set correctly in
/vendor/etc/camera/camxoverridesettings.txt:maxRAWSizes=20We will be doing more testing but most likely these updated drivers will become the official ones in an upcoming SDK release.
Alex
For those who are interested in more details, a new plot with some further discussion regarding exactly how the higher MIPI bitrate (2100Mbps) can interfere with the lower GPS L1 frequency (1575.42).
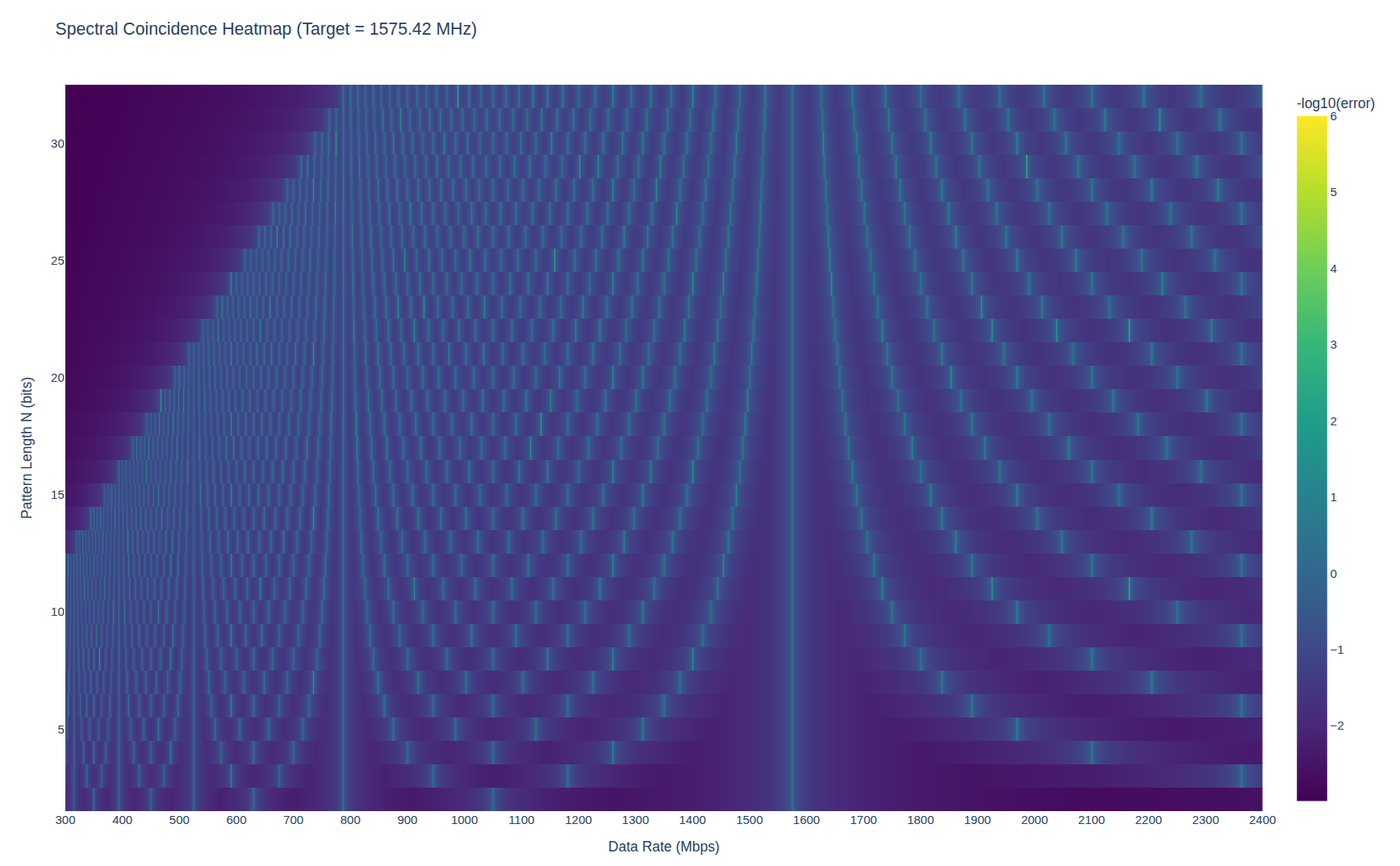
The plot shows whether different MIPI bitrates are capable of generating interference for the L1 band, considering that the MIPI data line is not producing a constant frequency (unlike the clock line). Byte sequences of different lengths will have different frequency components and they can have harmonics of the resulting slower frequency end up very close to gps L1. This is exactly what happened with 2100Mbps -- repeating 4-byte sequences can have a third harmonic equal to exactly GPS L1 frequency..
This table shows more details for the mipi data rates that may have strong interference with GPS L1. Actually the tables shows the exact bitrate that would have a perfect interference match to the GPS L1 center frequency.
| Data Rate (Mb/s) | Pattern Length (N) | Harmonic (k) | | ---------------- | ------------------ | ------------ | | 787.71 | 2 | 1 | | 1050.28 | 2 | 3 | | 1260.34 | 4 | 5 | | 1575.42 | 1 | 1 | | 1800.48 | 8 | 7 | | 2100.56 | 4 | 3 |In practice, the longer the pattern length, the least likely it is to repeat, creating constant interference. However the 4-byte patterns are very short and 2100Mbps ended up being the worst bitrate choice out of all reasonably fast bitrates (above 1300Mbps), excluding the L1 itself.
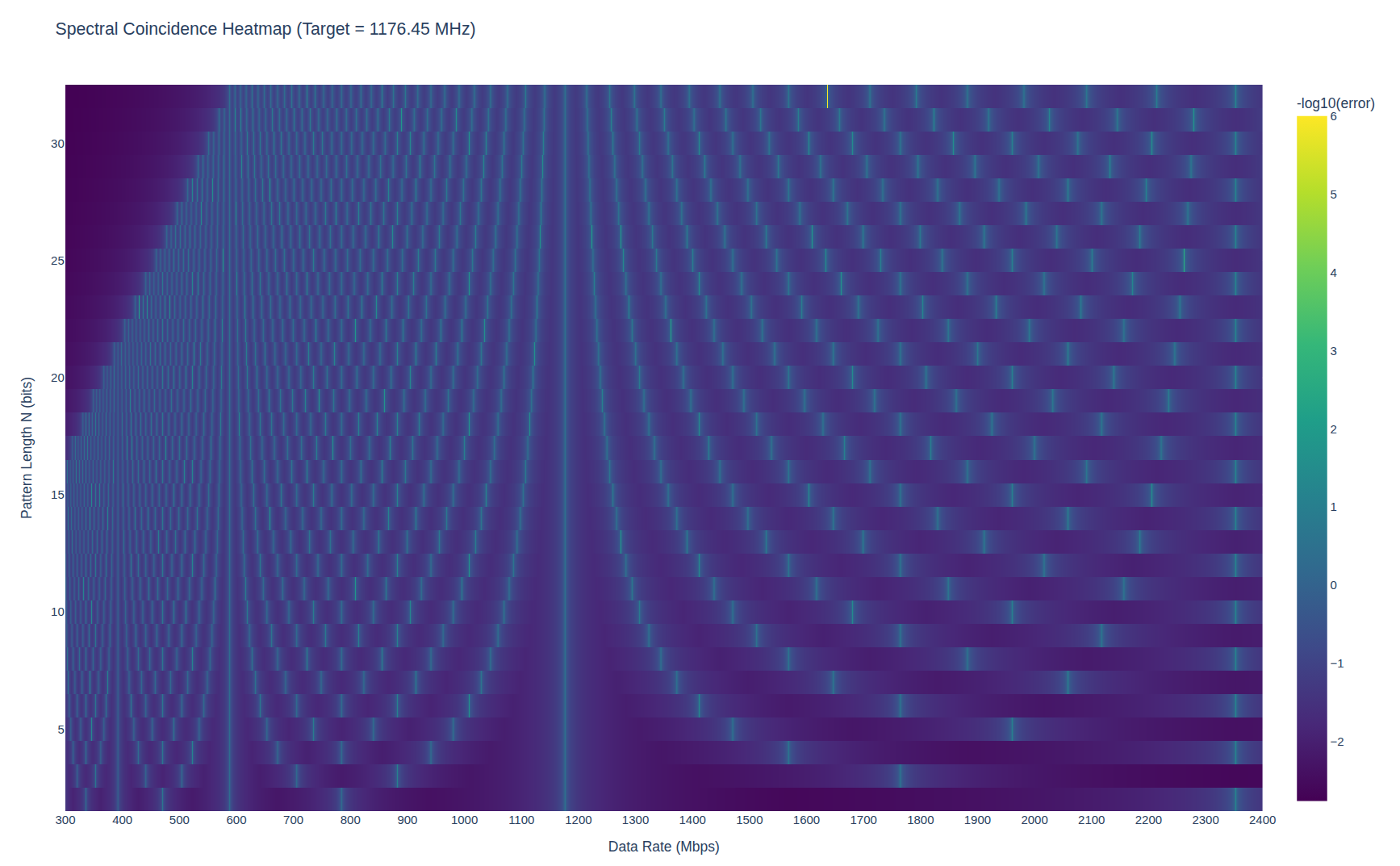
similar plot for GPS L5
And combined L1 + L5 plot
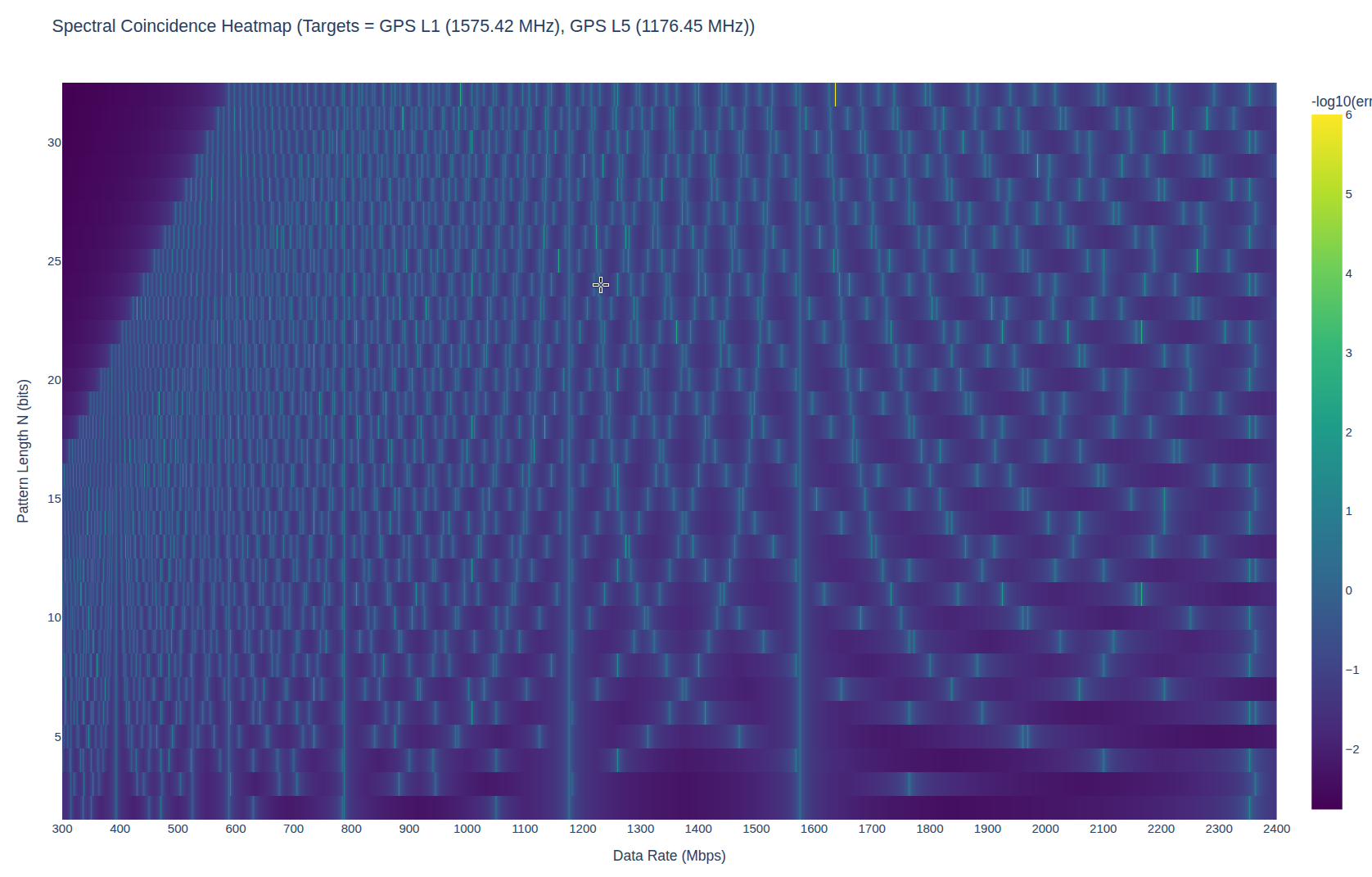
The 2088Mbps released in the post above (seemed good, based on the experimental results) seems relatively close to 2100, but it's interference will be about 10Mhz away from GPS L1 center frequency and it has shown to cause only 1-2dB drop when both cameras are running at max resolution. It seems that the absolute safest bitrate for GPS L1 would be around 1650Mbps, which has the largest margin.
Alex
-
I've downloaded the drivers (imx412_drivers_20260529). How do I install and select them?
Hi @bschulzhf
You need to copy the new sensormodule file with the correct slot id (number at the end) to
/usr/lib/cameraand (re)move the existing one, so that it does not get picked up by the camera pipeline.Good idea to back up your existing configuration before making changes.
Also more general details here : https://docs.modalai.com/configure-cameras/#connect-a-new-camera
Alex
-
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login