Modalai OpenVINS with cvp feature tracker flyaways (camera redundancy)
-
We are extensively testing camera failure cases on OpenVINS using the cvp/VFT instead of the default 'vins' tracker.
The big issue for is is that there are some flyaways still occuring in nominal conditions even when using 2-camera tracking (non-stereo). More importantly there doesn't seem to be true redundancy if one camera fails. It makes sense in a stereo configuration if one camera fails and tracking no longer works, but in the cvp multi-camera (front and downward) setup, shouldn't the other camera still track features and hold position?
Is there a timeline for when VFT will be stable, and is it actively being worked for a stable release in the near future?
One thing that helped with qvio feature tracking was the ability to use voxl-logger, but this functionality doesn't exist yet for openvins, hence using the voxl portal vio page to see when tracking fails
What hardware are you using? Starling v1 with upgraded motors
What version of software are you using? See below
How have you configured the software? See below
Do you have any logs? No logs, but vio page showing a flyaway in nominal conditions: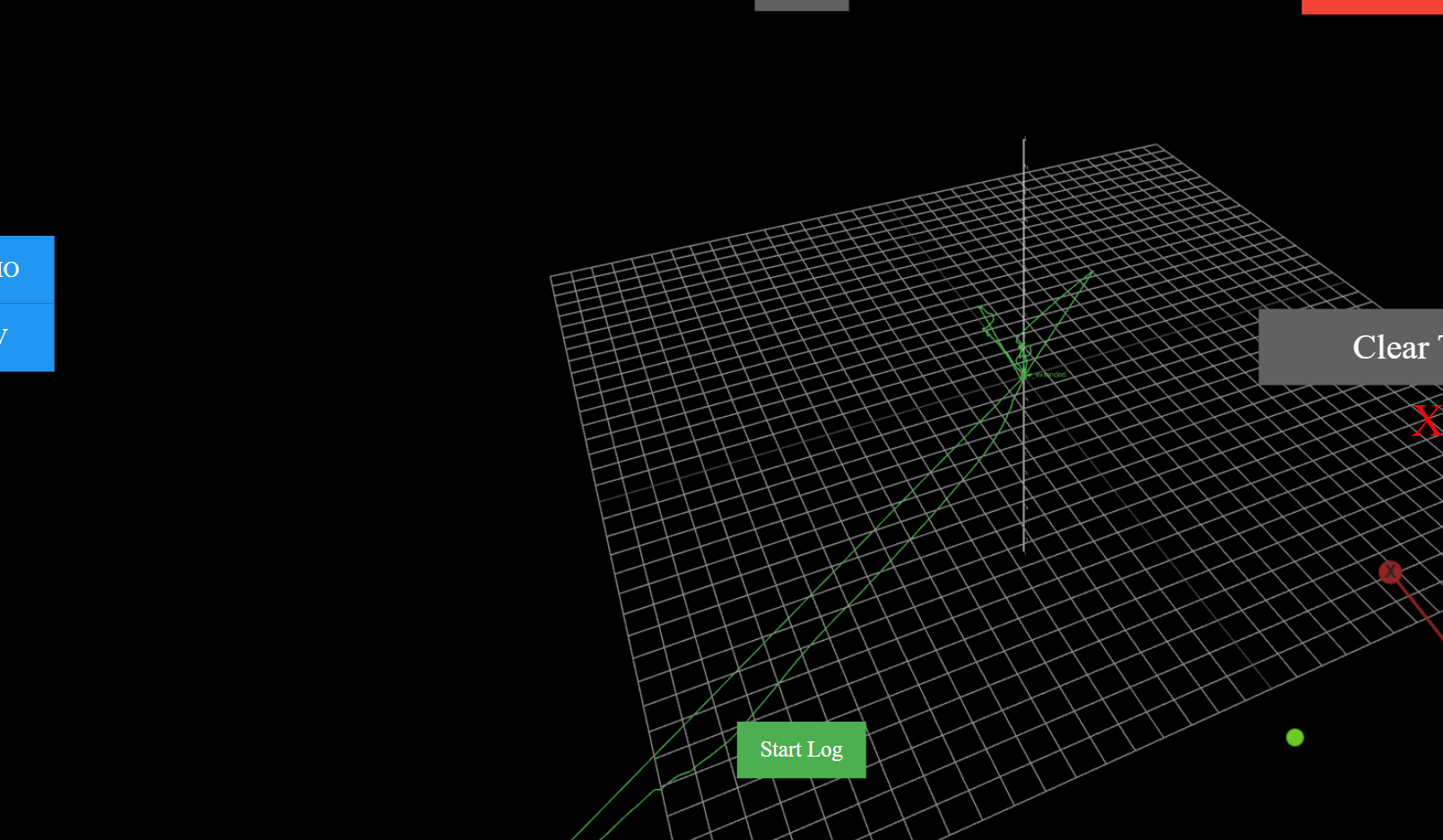
Can you share pictures of your setup? Front and down camera (front and down are ar0144 on my colleague's setup, but i have an ov7251 front and ar0144 down
Have you looked at the source code? Yes, looked at voxl-feature-tracker on gitlab and there are some apparent bugs in the software or it is not finished-------------------------------------------------------------------------------- hw platform: M0054 mach.var: 1.0.0 -------------------------------------------------------------------------------- voxl-suite: 1.2.0}, { "enable": true, "group_name": "tracking_FDR", "output_pipe": "tracking_feats", "overlay_pipe": "tracking_feat_overlay", "group_cams": [{ "enable": true, "input_pipe": "tracking_front", "tracker_type": "cvp", "num_features": 30 }, { "enable": true, "input_pipe": "tracking_down", "tracker_type": "cvp", "num_features": 30 }, { "enable": false, "input_pipe": "tracking_rear", "tracker_type": "cvp", "num_features": 30 }] }, { -
Hey there, voxl-logger for openvins is only avaiable using a combination of raw flags, e.g
. -c tracking_front -i imu_apps -r ov -r ov_extended -r ov_overlayYes the -o option for odometry is not completed yet for openvins. That hsould get you the log data for openvinsAs for simulating camera stream failure, it's very likely any attempt to cover a camera will increase the exposure of that stream, and in some cases you will still see random features: for example, covering with a finger will still pick up features from your finger print. We're still actively improving voxl-feature-tracker and should have a new version available soon.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login