How can I connect voxl and Cubepilot?
-
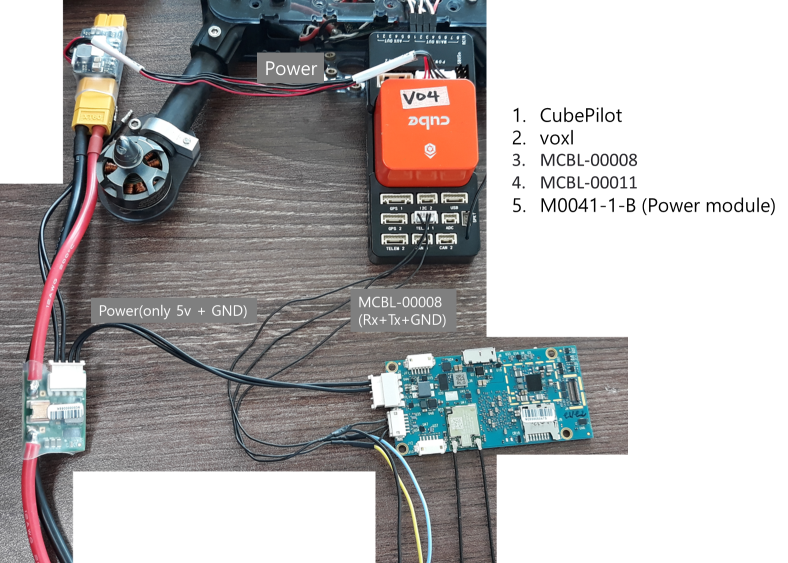
I'd like to connect voxl and CubePilot. But I can't get the uart messages.
The environment is as follows.
If I run voxl-vision-px4 -f , a warning message is displayed.
(WARNING PX4 DISCONNECTED FROM UART)/ # voxl-vision-px4 -f Enabling UDP recv debugging loading our own config file Created new json file: /etc/modalai/voxl-vision-px4.conf ================================================================= Parameters as loaded from config file: qgc_ip: 192.168.8.60 en_localhost_mavlink_udp 1 en_secondary_qgc: 0 secondary_qgc_ip: 192.168.1.214 qgc_udp_port_number: 14550 localhost_udp_port_number: 14551 udp_mtu: 512 en_vio: 1 en_voa: 0 en_send_vio_to_qgc: 0 en_send_voa_to_qgc: 0 en_set_clock_from_gps: 1 en_force_onboard_mav1_mode: 1 en_reset_px4_on_error: 1 qvio_auto_reset_quality: 0.000500 en_adsb: 0 adsb_uart_bus: 7 adsb_uart_baudrate: 57600 px4_uart_bus: 5 px4_uart_baudrate: 921600 offboard_mode: figure_eight follow_tag_id: 0 en_tag_fixed_frame: 0 fixed_frame_filter_len: 5 en_transform_mavlink_pos_setpoints_from_fixed_frame:0 ================================================================= loading extrinsics config file Created new empty json file: /etc/modalai/extrinsics.conf adding default extrinsics for imu1 to imu0 adding default extrinsics for imu0 to tracking adding default extrinsics for imu1 to tracking adding default extrinsics for body to imu0 adding default extrinsics for body to imu1 adding default extrinsics for body to stereo_l adding default extrinsics for body to tof adding default extrinsics for body to ground The JSON apriltag data was modified during parsing, saving the changes to disk starting geometry module starting px4 monitor starting uart mavlink Successfully opened mavparser starting udp mavlink Adding manual QGC IP address to udp connection list: 192.168.8.60 Added new UDP connection to 192.168.8.60 starting px4 shell starting fixed pose input starting vio manager starting tag manager starting offboard figure eight Init complete, entering main loop WARNING PX4 DISCONNECTED FROM UARTAnd If I run voxl-test-mavparser ,
/ # voxl-test-mavparser allocating RPC shared memory no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available no messages available ^Creceived signal 2 joining read thread no messages available exiting cleanly / #Please let me know what I did wrong.
The UART message was confirmed in the telemetry port of Cubepilot.
Version
-------------------------------------------------------------------------------- system-image: ModalAI 3.3.0 BUILDER: ekatzfey BUILD_TIME: 2021-06-06_19:28 kernel: #1 SMP PREEMPT Sun Jun 6 19:41:01 UTC 2021 3.18.71-perf factory-bundle: 1.0.1 (Yocto installation) -------------------------------------------------------------------------------- architecture: aarch64 processor: apq8096 os: GNU/Linux -------------------------------------------------------------------------------- voxl-suite: Package: voxl-suite Version: 0.4.6 libvoxl_cutils - 0.0.2 libvoxl_io - 0.5.4 voxl-camera-server - 0.7.1 voxl-cpu-monitor - 0.1.7 voxl-dfs-server - 0.2.0 voxl-docker-support - 1.1.3 voxl-gphoto2 - 0.0.5 voxl-imu-server - 0.8.1 voxl-mavlink - 0.0.2 voxl-modem - 0.12.0 voxl-mpa-tools - 0.2.6 voxl-nodes - 0.1.6 voxl-qvio-server - 0.3.1 voxl-streamer - 0.2.3 voxl-suite - 0.4.6 voxl-tag-detector - 0.0.2 voxl-tflite - 0.0.1 voxl-tflite-server - 0.1.0 voxl-utils - 0.7.1 voxl-vision-px4 - 0.9.2 voxl-vpn - 0.0.3 -
@Kglee ,
What baud rate have you setup the TELEM port via PX4? By default, voxl-vision-px4 wants 921600 and MAVLINK "onboard mode" (102):
Otherwise, voxl-vision-px4 might timeout as it's not getting data at the expected rate.
Do you have an oscilloscope or no?
-
@Kglee ,
What baud rate have you setup the TELEM port via PX4? By default, voxl-vision-px4 wants 921600 and MAVLINK "onboard mode" (102):
Otherwise, voxl-vision-px4 might timeout as it's not getting data at the expected rate.
Do you have an oscilloscope or no?
-
VIO requires the tracking camera to function. I see a VOXL in your picture without any cameras, are you using a different setup than the picture?
-
VIO requires the tracking camera to function. I see a VOXL in your picture without any cameras, are you using a different setup than the picture?
-
Although a majority of our testing is at the higher baud, we've used lower without problems, so it should be fine.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login