Sentinel flips during takeoff
-
@stevedan And if you set the parameter UART_ESC_VLOG to 1 then we can see in the logs if the ESC is doing the right thing.
-
@Eric-Katzfey i will log it on Monday and send it.
@stevedan A video of a good flight and of a bad one would also be pretty helpful.
-
@stevedan Also, with battery / power removed, can you slowly rotate each motor by hand and see if you can feel any sticky spots? Any unusual noise from the motor when it is being powered?
@Eric-Katzfey when I spin the motor slow, it does as shown in the video but spinning it a bit fast, it goes smoothly. No unusual noise when I turn the drone up. Videos are in the same link as before. https://drive.google.com/drive/folders/1tFS2fI25ayHK0pZ4bpmeG1JC0PZRACEX?usp=sharing
-
@stevedan A video of a good flight and of a bad one would also be pretty helpful.
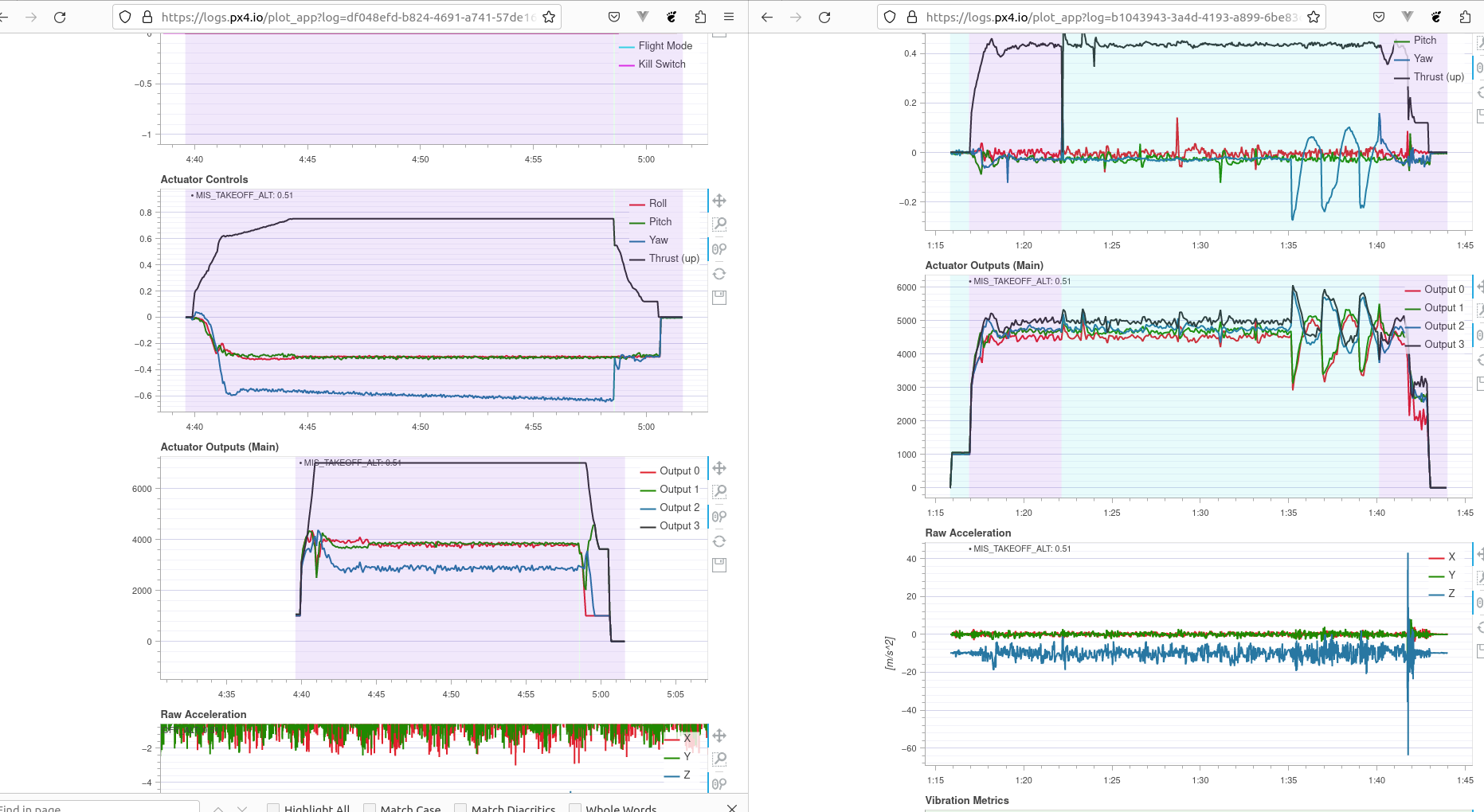
@Eric-Katzfey I have also added a video to the link and the log file with the name test_flight_UART_ESC_VLOG_fail for the failed flight test and test_flight_UART_ESC_VLOG_sucess for the successful flight test.
-
@Eric-Katzfey I have also added a video to the link and the log file with the name test_flight_UART_ESC_VLOG_fail for the failed flight test and test_flight_UART_ESC_VLOG_sucess for the successful flight test.
@stevedan Thanks! It's clear from the logs that PX4 is commanding the proper motor speed to the ESC but the ESC is reporting that the motor is spinning much slower than the desired speed until the drone starts to take off. At that point that motor is commanded to go to maximum rpm and then all of a sudden the motor does start spinning at the desired speed. We are discussing this internally and will come up with a recommendation for next steps.
-
@Eric-Katzfey I have also added a video to the link and the log file with the name test_flight_UART_ESC_VLOG_fail for the failed flight test and test_flight_UART_ESC_VLOG_sucess for the successful flight test.
@stevedan One quick thing you can try is to blow some compressed air through the motor. If there is some debris stuck inside the motor then the air could blow it out.
-
@stevedan One quick thing you can try is to blow some compressed air through the motor. If there is some debris stuck inside the motor then the air could blow it out.
-
@Eric-Katzfey I have tried that and it seems not to work. As you said, this happens when during the arming, one of the propellers does not spin fast enough like the others. It happens randomly on both drones.
@stevedan Okay, thanks for trying that. We are still discussing internally on best next steps.
-
@Eric-Katzfey Just adding more information, this also happens sometimes in manual flight, but it take time for the motors to get to speed during arming.
@stevedan Okay, thanks! And thanks for your patience. We are locating a drone here in San Diego that exhibits the same behavior so we have a way to reproduce and resolve the issue. One option is to send some new motors but our lead ESC engineer believes he can resolve this with an update to the ESC firmware.
-
@stevedan Okay, thanks! And thanks for your patience. We are locating a drone here in San Diego that exhibits the same behavior so we have a way to reproduce and resolve the issue. One option is to send some new motors but our lead ESC engineer believes he can resolve this with an update to the ESC firmware.
@Eric-Katzfey Thank you for the fast response. Let us know because there is a bit of urgency to use the drone and there wont be enough time to procure another due to lead time. We currently have 3 new drone and plan to procure more but this is hindering us from doing so.
-
@Eric-Katzfey Thank you for the fast response. Let us know because there is a bit of urgency to use the drone and there wont be enough time to procure another due to lead time. We currently have 3 new drone and plan to procure more but this is hindering us from doing so.
@stevedan Okay, understood. We are testing some new ESC firmware now and hope to have an update for you early next week.
-
@Eric-Katzfey Thank you for the fast response. Let us know because there is a bit of urgency to use the drone and there wont be enough time to procure another due to lead time. We currently have 3 new drone and plan to procure more but this is hindering us from doing so.
@stevedan We will need to walk you through the procedure to update the ESC firmware. In order to do that we need to know what software you have running on the drone now. Can you paste the output of
voxl-version? -
Service Name | Version | Enabled | Running | CPU Usage --------------------------------------------------------------------------- docker-autorun | 1.2.4 | Disabled | Not Running | docker-daemon | 1.2.4 | Disabled | Not Running | modallink-relink | 0.16.1 | Disabled | Not Running | voxl-camera-server | 1.3.5 | Enabled | Running | 116.7 voxl-cpu-monitor | 0.3.0 | Enabled | Running | 0.0 voxl-dfs-server | 0.1.0 | Disabled | Not Running | voxl-imu-server | 0.5.0 | Enabled | Running | 0.0 voxl-mavlink-server | 0.3.0 | Enabled | Running | 0.0 voxl-modem | 0.16.1 | Disabled | Not Running | voxl-portal | 0.5.0 | Enabled | Running | 5.6 voxl-px4-imu-server | 0.1.2 | Disabled | Not Running | voxl-px4 | 1.12.31 | Enabled | Running | 0.0 voxl-qvio-server | 0.8.2 | Enabled | Running | 27.8 voxl-remote-id | 0.0.5 | Disabled | Not Running | voxl-softap | 0.1.5 | Disabled | Not Running | voxl-static-ip | 0.1.5 | Disabled | Not Running | voxl-streamer | 0.4.1 | Enabled | Running | 0.0 voxl-tag-detector | 0.0.4 | Disabled | Not Running | voxl-tflite-server | 0.3.1 | Disabled | Not Running | voxl-time-sync | 1.2.2 | Disabled | Not Running | voxl-vision-px4 | 1.4.0 | Enabled | Running | 5.6 voxl-wait-for-fs | 1.2.2 | Enabled | Completed | -
@stevedan We will need to walk you through the procedure to update the ESC firmware. In order to do that we need to know what software you have running on the drone now. Can you paste the output of
voxl-version?@Eric-Katzfey Is it possible we can set a time that both of us are available to speed up the process given that your timezone is different from mine?. like 6pm spain time?
-
@Eric-Katzfey Is it possible we can set a time that both of us are available to speed up the process given that your timezone is different from mine?. like 6pm spain time?
@stevedan Would you be willing to just move to our latest software platform release to resolve this rather than trying to get new ESC firmware setup in the release that you have now? It is in beta but we can give you access to it and it should solve your flipping issue.
-
@Eric-Katzfey Is it possible we can set a time that both of us are available to speed up the process given that your timezone is different from mine?. like 6pm spain time?
@stevedan I sent you a link to the new platform release in email if you are interested in trying it out.
-
@stevedan I sent you a link to the new platform release in email if you are interested in trying it out.
-
@Eric-Katzfey I can test this release and see if it solves the problem. When would this release be officially out?.
@stevedan I depends on what kind of issues we find with it as we continue testing it. We're hopeful that it will be ready for official release in the next week.
-
@stevedan I depends on what kind of issues we find with it as we continue testing it. We're hopeful that it will be ready for official release in the next week.
@Eric-Katzfey Maybe you can help me fixed but the vio result on Qgroundcontrol is streaming at 1hz, and the reaction speed of the remote control on Qgroundcontrol is really bad. It reacts slow, is there something I am doing wrong
What is strange is that from the drone, the vio data ms is fine voxl2:~$ voxl-inspect-qvio
waiting for serverdt(ms) | T_imu_wrt_vio (m) |Roll Pitch Yaw (deg)|features|quality| state| error_codes |
29.3 | -0.00 -0.00 -0.00| -0.0 0.0 0.0| 28 | 27% | OKAY | ^C
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login