voxl-mapper does not show the trajectory
-
Hello Modalai. I'm currently testing voxl-mapper with tracking and TOF camera. The camera server and vixion-px4 are functioning properly.
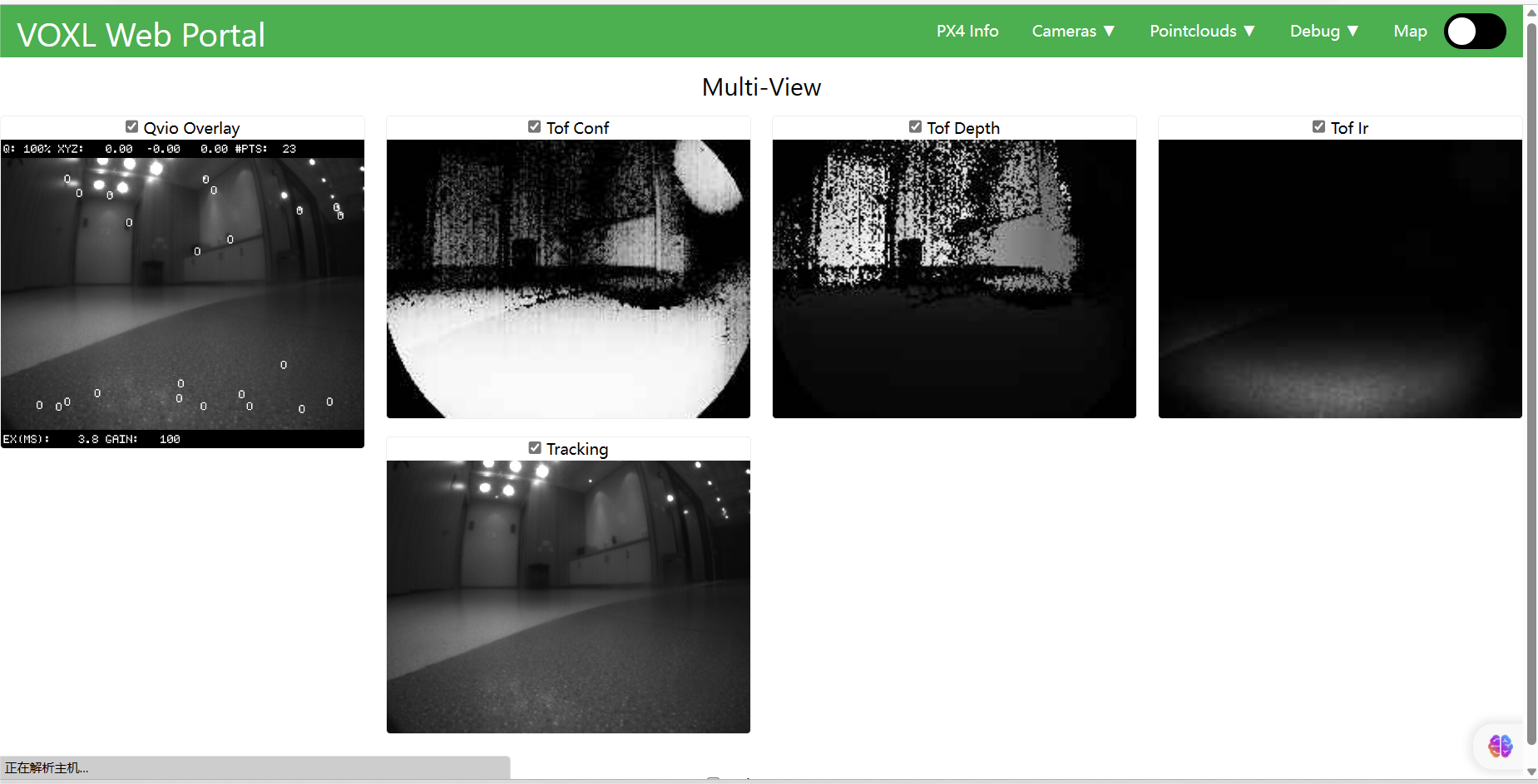
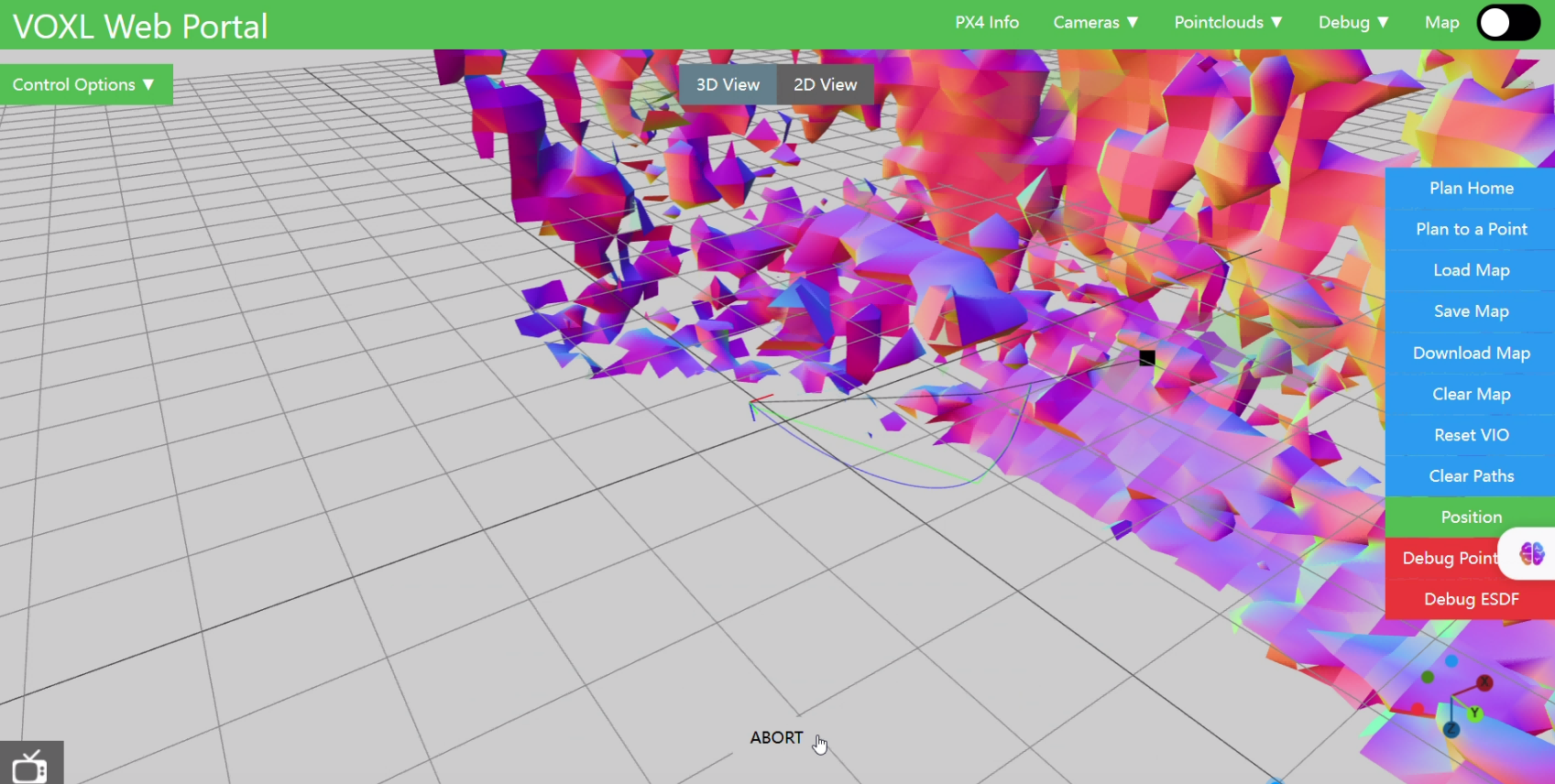
I was able to take off in position mode and switch to offboard mode successfully. However, when I click on a point in Portal UI, it fails to generate the trajectory and there's only the point:
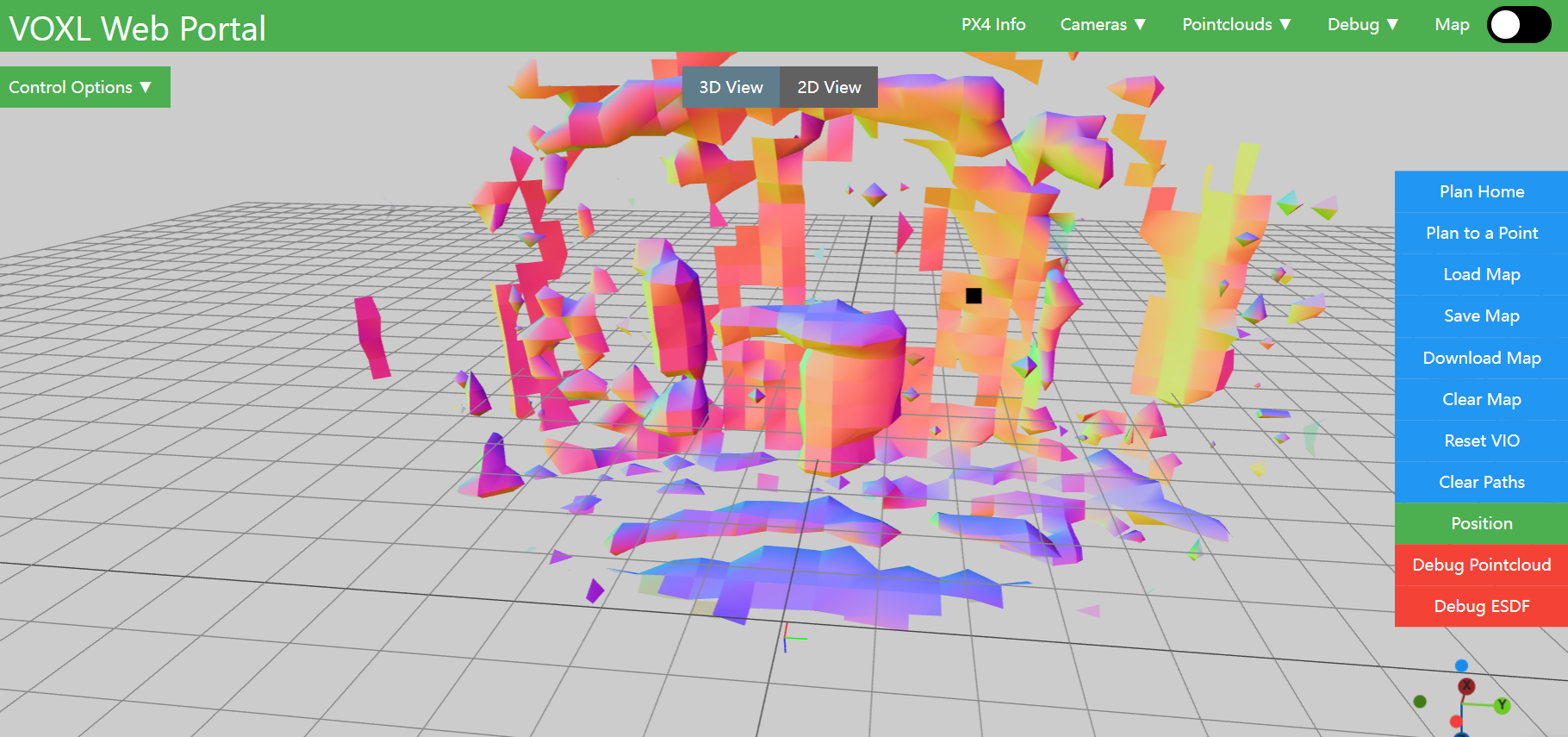
The terminal displays the following error message:
Using start pose of: x: -0.03, y: 0.02, z: 0.09 Using goal pose of: x: -0.74, y: 1.67, z: -2.11 Starting RRTConnect planner ERROR: End point is in collisionI 'm certain that the end-point is in right position(the value of z is negative, which means that it's off the ground). But why there is no trajectory?
-
I came across a former-topic discussing a similar issue to mine.
BTW, about a month ago, when I tried using voxl-mapper based on your YouTube video (hands-on test without flying), it was able to generate the path successfully.
During that time, I accidentally turned over the TOF camera, resulting in a reversed image. I'm wondering if that could be the cause of the problem I'm currently facing?