voxl-mapper does not show the trajectory
-
Hello Modalai. I'm currently testing voxl-mapper with tracking and TOF camera. The camera server and vixion-px4 are functioning properly.
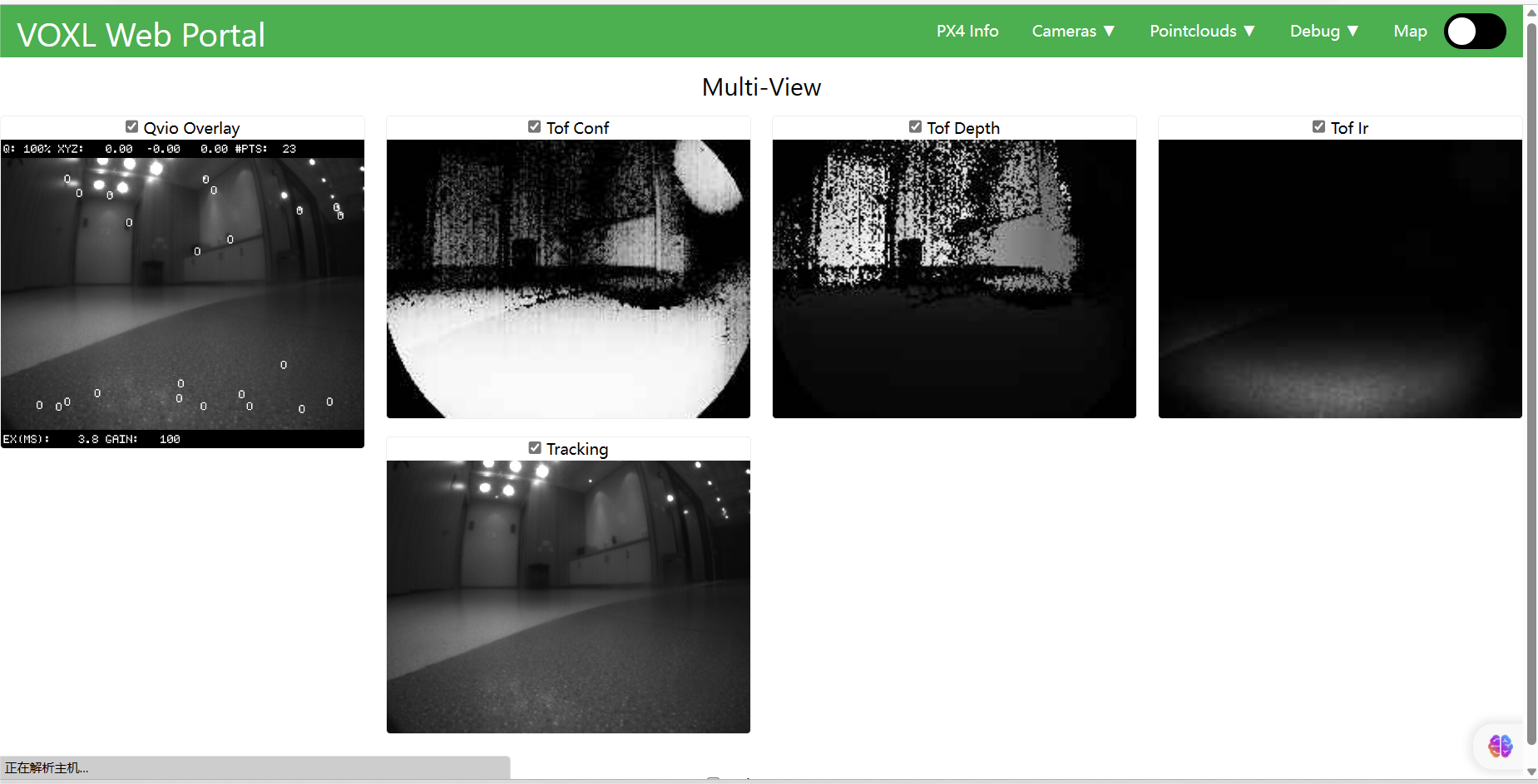
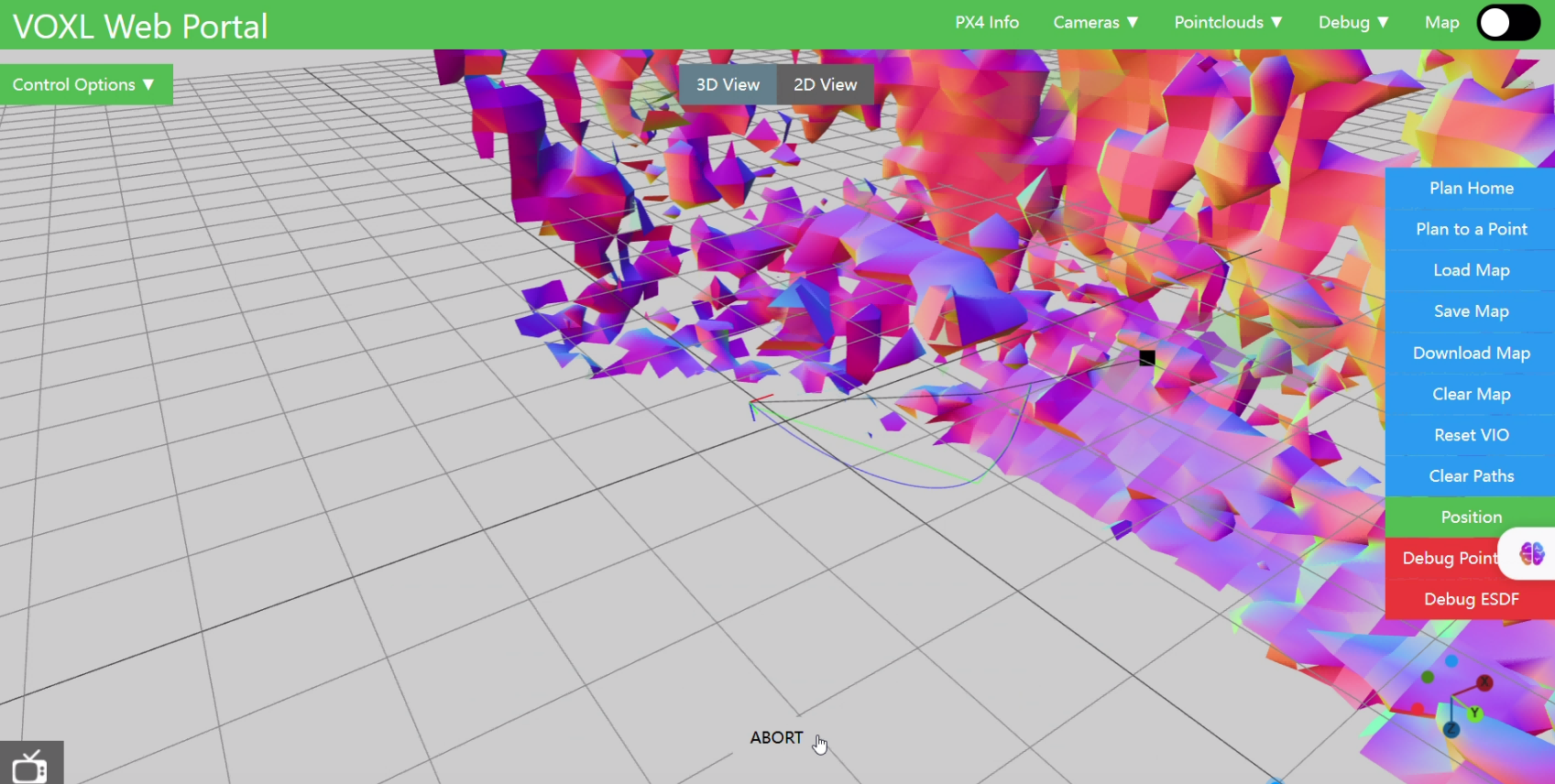
I was able to take off in position mode and switch to offboard mode successfully. However, when I click on a point in Portal UI, it fails to generate the trajectory and there's only the point:
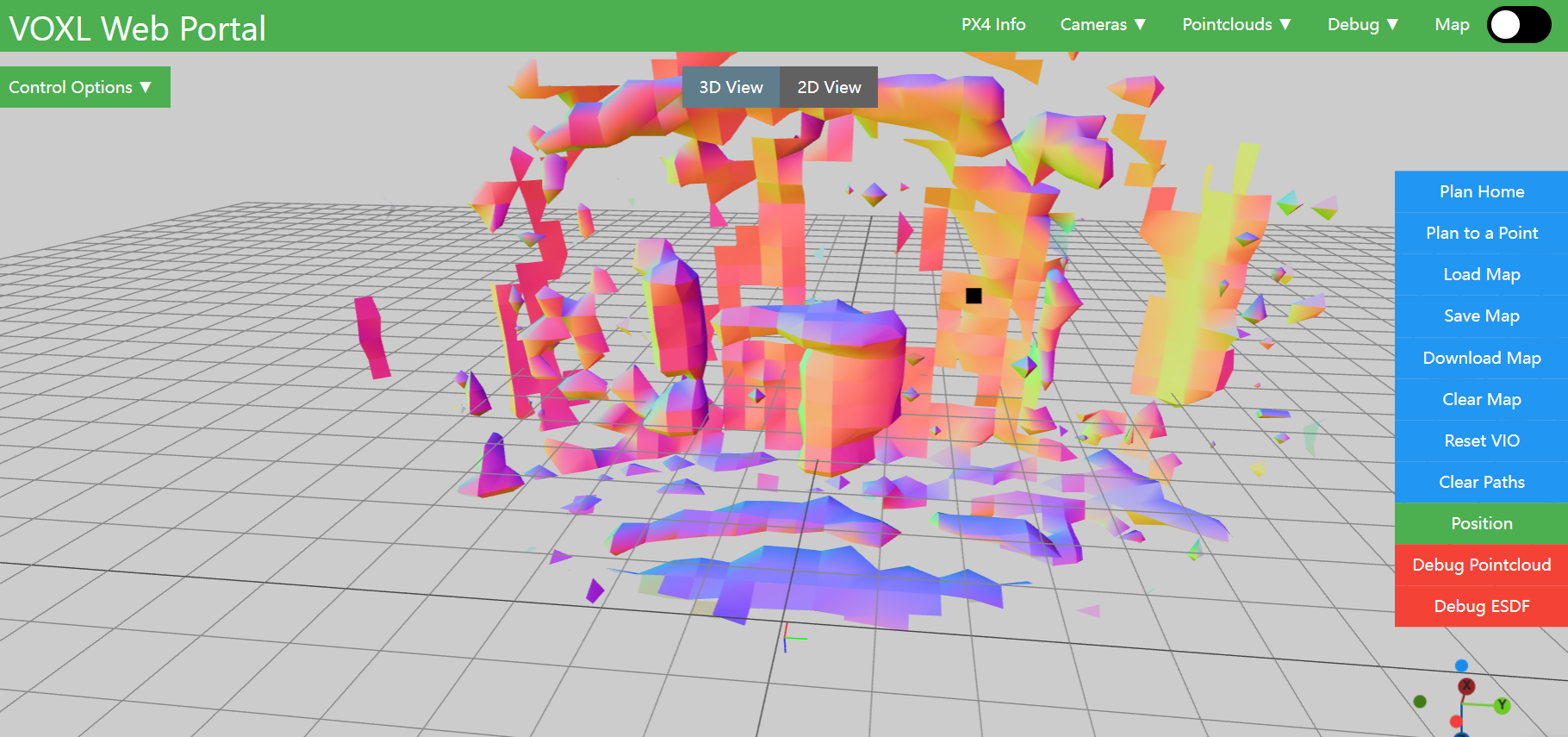
The terminal displays the following error message:
Using start pose of: x: -0.03, y: 0.02, z: 0.09 Using goal pose of: x: -0.74, y: 1.67, z: -2.11 Starting RRTConnect planner ERROR: End point is in collisionI 'm certain that the end-point is in right position(the value of z is negative, which means that it's off the ground). But why there is no trajectory?
-
I came across a former-topic discussing a similar issue to mine.
BTW, about a month ago, when I tried using voxl-mapper based on your YouTube video (hands-on test without flying), it was able to generate the path successfully.
During that time, I accidentally turned over the TOF camera, resulting in a reversed image. I'm wondering if that could be the cause of the problem I'm currently facing?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login