Bad Image Output using voxl_cam_ros
-
Hey Modalai Team,
I'm trying to use
voxl_cam_roswith an M0025 (IMX214) and am not getting good image quality out. Here is an example:

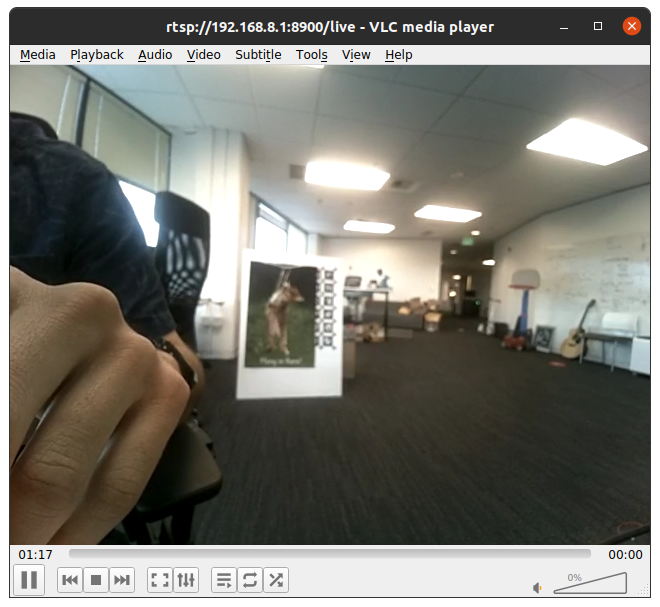
I am able to use
voxl-rtspwith a decent output:
I am not getting any terrible errors when launching the ROS node except for
ERROR: The requested frame_id(0) does not exist in the queue. [ERROR] [20204.856915384]: GetImageData() Unable to get Frame data for id: 0 rc: -2which is harmless according to this post.
my voxl-version is as follows:
yocto:/# voxl-version cat: /etc/modalai/voxl-software-bundle-version.txt: No such file or directory -------------------------------------------------------------------------------- system-image: ModalAI 3.2.0 BUILDER: ekatzfey BUILD_TIME: 2021-02-05_19:54 kernel: #1 SMP PREEMPT Fri Feb 5 20:03:22 UTC 2021 3.18.71-perf factory-bundle: 1.0.1 (Yocto installation) -------------------------------------------------------------------------------- architecture: aarch64 processor: apq8096 os: GNU/Linux -------------------------------------------------------------------------------- voxl-suite: Package: voxl-suite Version: 0.3.4 Depends: voxl-utils (>= 0.6.0), libmodal_json (>= 0.3.4), libmodal_pipe (>= 1.7.8), librc_math (>= 1.1.4), libvoxl_io (>= 0.5.4), mavlink-camera-manager (>= 0.0.1), opencv (>= 4.5.1), openmp (>= 10.0.1), voxl-camera-server (>= 0.5.6), voxl-dfs-server (>= 0.0.7), voxl-docker-support (>= 1.1.1), voxl-gphoto2 (>= 0.0.5), voxl-hal3-tof-cam-ros (>= 0.0.5), voxl-imu-server (>= 0.7.8), voxl-modem (>= 0.11.0), voxl-mpa-tflite-server (>= 0.0.2), voxl-mpa-tools (>= 0.1.6), voxl-nodes (>= 0.1.3), voxl-qvio-server (>= 0.2.1), voxl-rtsp (>= 1.0.3), voxl-streamer (>= 0.2.1), voxl-vision-px4 (>= 0.8.1), voxl-vpn (>= 0.0.3) Status: install user installed Section: base Architecture: all Maintainer: james@modalai.com MD5Sum: e1e5bf1a125affe5036099f6ce895bed Size: 1818 Filename: voxl-suite_0.3.4.ipk Description: meta-package for voxl-suite stable release Installed-Time: 13238 Package: voxl-suite Version: 0.2.0 Depends: docker, imu_app (= 0.0.6), libvoxl_io (= 0.5.2), voxl-cam-manager (= 0.2.2), voxl-docker-support (= 1.1.1), voxl-hal3-tof-cam-ros (= 0.0.2), voxl-modem (= 0.10.0), voxl-nodes (= 0.0.8), voxl-rtsp (= 1.0.2), voxl-utils (= 0.5.2), voxl-vision-px4 (= 0.6.8), voxl_imu (= 0.0.4), voxl-time-sync (= 0.0.1), voxl-vpn (= 0.0.2), librc_math (= 1.1.2), libmodal_pipe (= 1.2.2), modalai-vl (= 0.1.3) Status: unknown ok not-installed Section: base Architecture: armv7a Maintainer: james@modalai.com MD5Sum: af706cd3c1ea59f274f2ed9b93141f1d Size: 870 Filename: voxl-suite_0.2.0.ipk Description: meta-package to install all of the voxl-suite --------------------------------------------------------------------------------Any tips would be greatly appreciated.
Thanks,
Dean -
Hello Dean,
Starting with voxl-suite 0.3.4 (what you have installed) voxl_cam_ros is deprecated due to annoyances like this.
Please try its replacement node voxl_mpa_to_ros. This will publish all cameras, IMU, and some other data to ROS all with one node!
yocto:/# roslaunch voxl_mpa_to_ros voxl_mpa_to_ros.launch
in another window:
yocto:/# rostopic list
/hires/image_raw
/imu0
/imu1
/qvio/odometry
/qvio/pose
/qvio_overlay/image_raw
/rosout
/rosout_agg
/stereo/left/image_raw
/stereo/right/image_raw
/tracking/image_raw
/parameter_descriptions
/tracking/image_raw/compressedDepth/parameter_updatesDon't worry, it won't actually publish data until something subscribes to the topic so it's not wasting CPU having all those topics advertised.
Best Regards,
James -
Hi @James-Strawson,
Thanks for the tip I will try it out!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login