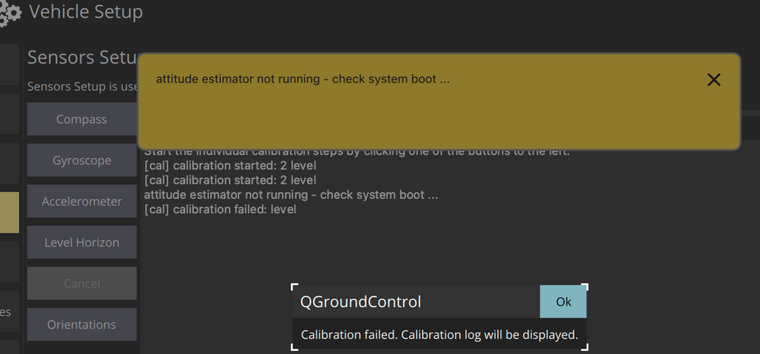
Attitude Estimator Error
-
I had purchased the voxl2 I/O board and got everything hooked up. Upon trying to calibrate the voxl2 over UDP an error "Attitude estimator not running, check system boot" is thrown. I tried using mavlink shell but according to https://docs.modalai.com/voxl2-px4-user-guide/#known-issues-and-limitations this is not available... Could you provide a guide to debugging messages on the flight controller similar to that of mavlink shell / nuttshell.
-
Hi @mawriyo ,
I just added some info that should help:
https://docs.modalai.com/voxl2-px4-developer-guide/#how-to-access-the-px4-shell(Also, there's a known issue that when the PX4 process is killed (e.g. CTRL+C from the shell) the system freezes and needs a reboot)
Please let me know if things aren't clear and we can update docs.
-
The following occurs
https://imgur.com/a/dftsjQZApparently the file is too large... i apologize for the link

-

Shrunk it! ;). OK let me check into this
-
@mawriyo ,
Do you have an external mag/compass or no? I'm thinking maybe not, and if that's the case perhaps EKF2 is looking for mag data....
I replicated during "level horizon" calibration if the mag is missing:
In order to proceed without a mag, you can run the following (assuming PX4 is running already, and these commands are in a new terminal):
# set to NONE px4-param set EKF2_MAG_TYPE 5 # verify px4-param show EKF2_MAG_TYPE -
We are using an external gps + mag (Here3 gps combo) and wired up the system accordingly. We still are not able read data from either... Additionally we cannot get the voxl2 IO to register the voxl... IE We see a blue flashing led and a solid orange. We cant get that to become something we use...
-
Updating px4 fixed the blinking LED matter and we can Arm. (yay!) but we still are having issues connecting the HERE3 radio... please advise
@mawriyo Our PX4 implementation is custom for the VOXL 2 and usually requires some additional work when integrating new components. We normally use the Holybro GPS / Compass / LED units or the Matek units and so we can only say that those are known to be supported. Anything else, such as the Here3 unit, probably will need some extra work to integrate. How are you attaching the Here3 to the system? Do you have a wiring diagram that you can provide?
-
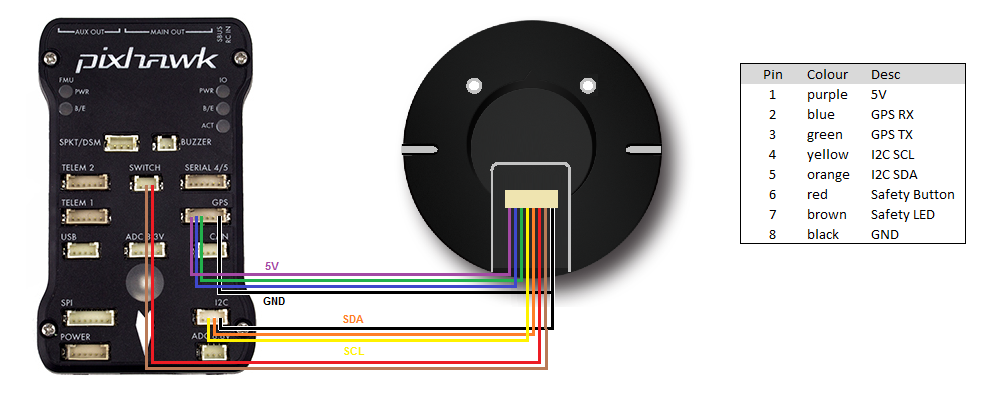
Using https://ardupilot.org/copter/_images/here-plus-pixhawk.png as a reference...
5V -> 5V
GPSRX -> GNSS TX 3P3V
GPSTX -> GNSS RX 3P3V
I2C SCL -> MAG SCL 3P3V
I2C SDA -> MAG SDA 3P3V
Ground -> Ground1:1
2:2
3:3
4:4
5:5
8:6We also swapped RX and TX to double check.
-
Using https://ardupilot.org/copter/_images/here-plus-pixhawk.png as a reference...
5V -> 5V
GPSRX -> GNSS TX 3P3V
GPSTX -> GNSS RX 3P3V
I2C SCL -> MAG SCL 3P3V
I2C SDA -> MAG SDA 3P3V
Ground -> Ground1:1
2:2
3:3
4:4
5:5
8:6We also swapped RX and TX to double check.
@mawriyo Okay, looks like you have a Here+ GPS / Compass, not a Here3. Do you know which magnetometer is inside? Seems like some versions have HMC5883 which we should support now, and some have ICM20948 which we do not. However, adding new magnetometer support is usually relatively straight forward. I can't tell from your comments if you were successful in getting both GPS and Compass (magnetometer) running properly? You also mention a Here3 radio. Are you still having trouble with that? How are you trying to attach that to the system? Do you have any documentation on the Here3 radio that you are trying to use so that we can review it to understand how it is supposed to work. This is a new device for us and we have no experience with it.
-
Using https://ardupilot.org/copter/_images/here-plus-pixhawk.png as a reference...
5V -> 5V
GPSRX -> GNSS TX 3P3V
GPSTX -> GNSS RX 3P3V
I2C SCL -> MAG SCL 3P3V
I2C SDA -> MAG SDA 3P3V
Ground -> Ground1:1
2:2
3:3
4:4
5:5
8:6We also swapped RX and TX to double check.
@mawriyo Here3 GPS support is now available in voxl-px4 1.4.27 available here: http://voxl-packages.modalai.com/dists/qrb5165/dev/binary-arm64/voxl-px4_1.4.27-202209272330_arm64.deb. This needs to be used with the Here3 in "i2c mode" which means opening up the unit, placing the switch in the "i2c" position, and creating a custom wiring harness to route UART and i2c lines over to VOXL 2 J19. Launch voxl-px4 with the new -h flag to enable this new support. The Here3 unit has an ak09916 magnetometer and TCA62724FMG LED controller.
{kind=link}
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login