POSITION_TARGET_LOCAL_NED
-
Hey,
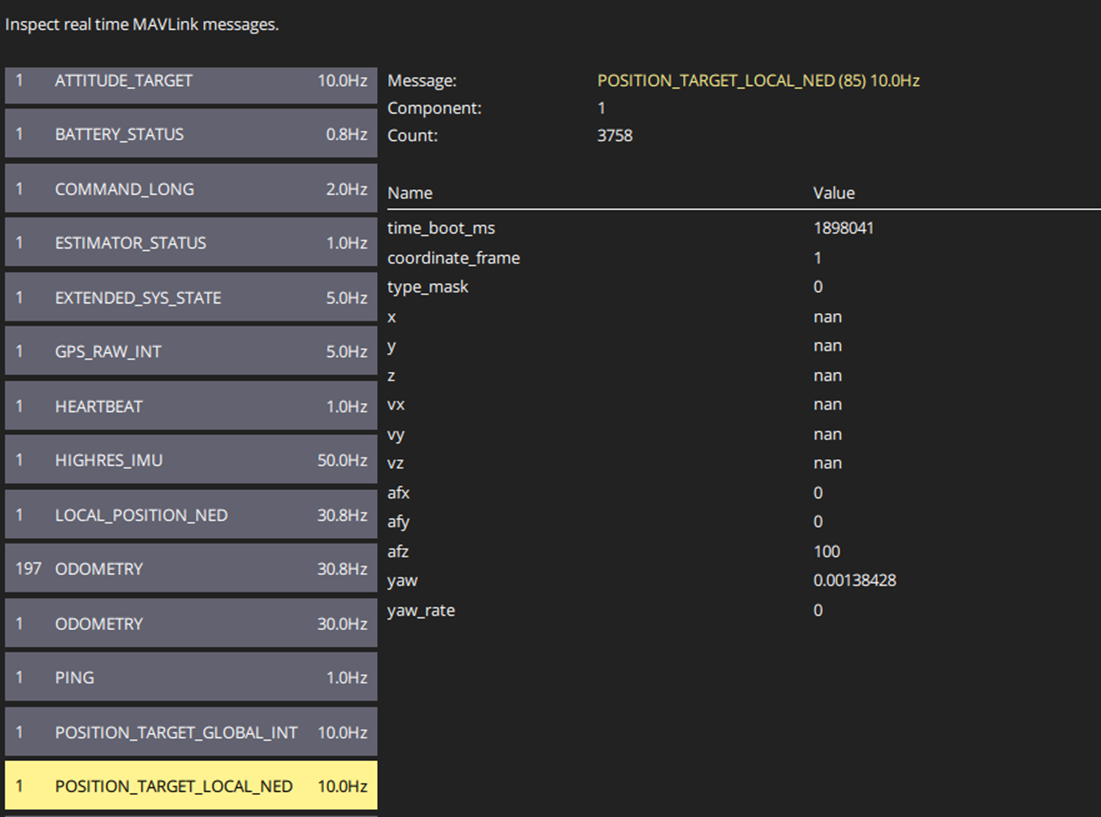
I am trying to enable the POSITION_TARGET_LOCAL_NED to work, and see it in QGC, what I am getting is nan even thou a couple of day ago it worked and I cant get it to work.I am using QGC V4.2.3
This is what I get :
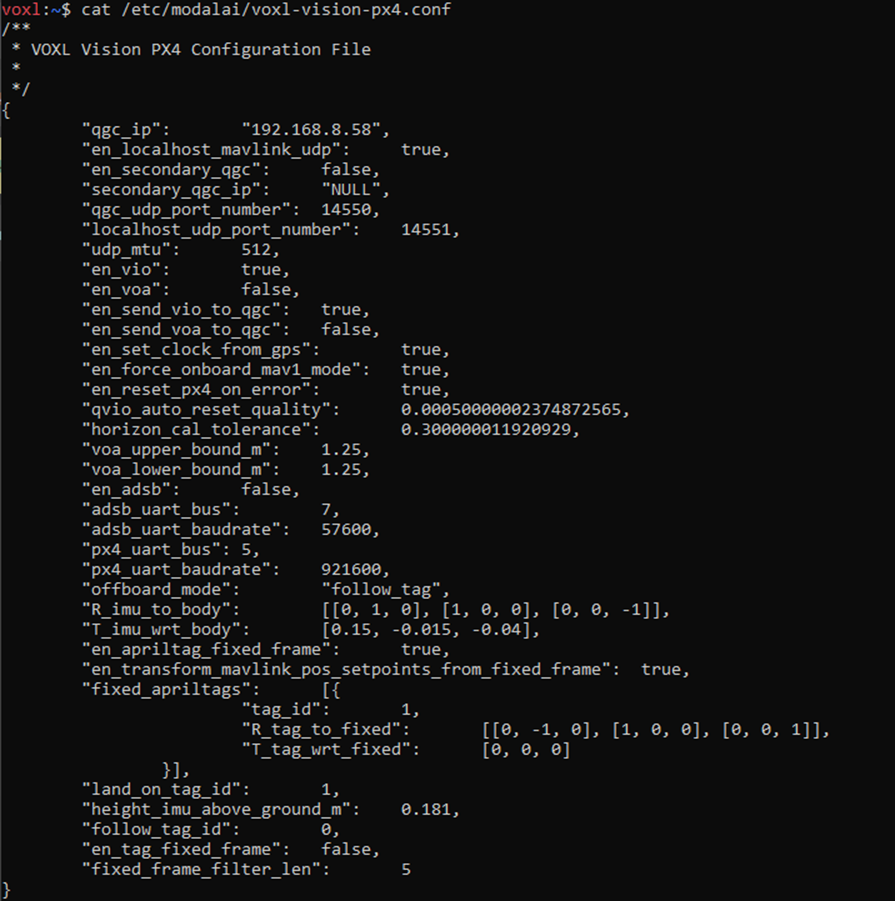
This is my conf file
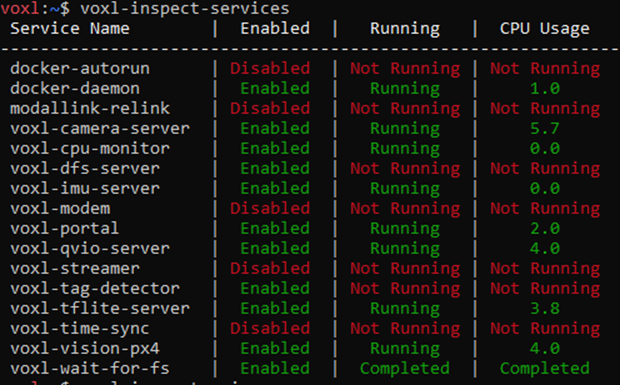
VOXL VIO is working :

I think that one of my problems is that the voxl-tag-detector is enabled but but running when I power on the system, I have not managed to enable that.
My end goal for right now is flying the quad indoor and have it land on a fiducial marker.
Thanks in advance.
-
I have enabled voxl-tag-detector on boot, it did not help.
I used systemctl enable voxl-tag-detector and in the **.service I used Restart=always
.