ToF sensor and VOA
-
Hi, I'd like to know if is it possible to use a ToF sensor for obstacle avoidance with voxl2. To give you more context, when I run
voxl-inspect-tofI get the correct distance measurements. I modified/etc/modalai/voxl-vision-px4.conf, where "en_voa" is set to true and "voa_inouts" only accepts "tof".To verify that this is working I run
voxl-vision-px4 -sbut all distances are none. Please let me know how I can fix this.Also, is it possible to see objects with a shorter range using ToF, like around 1m?
-
Yes this should absolutely be possible, can you send the screenshot of your voxl-vision config file as well.
As for range we usually cut off the tof data around 15 cm in front of the camera, so it usually has an effective range of ~0.15-5 meters
-
Hi @Alex-Gardner, sure! This is the configuration of
/etc/modalai/voxl-vision-px4.conf.
If there is any other parameter that can be improved please let me know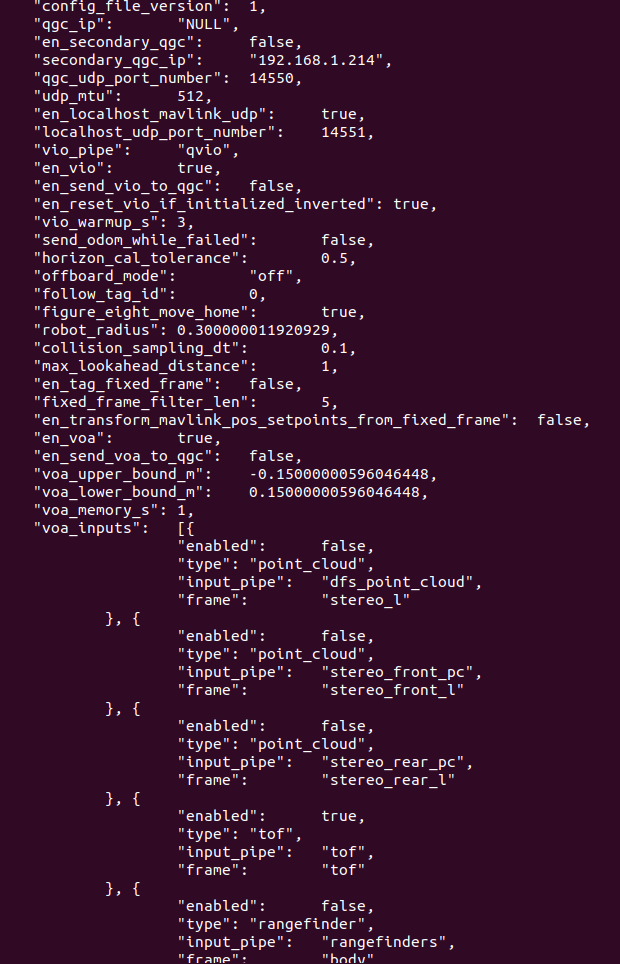
-
Yes this should absolutely be possible, can you send the screenshot of your voxl-vision config file as well.
As for range we usually cut off the tof data around 15 cm in front of the camera, so it usually has an effective range of ~0.15-5 meters
Hi @Alex-Gardner , is there any other file I should upload?
-
Yes this should absolutely be possible, can you send the screenshot of your voxl-vision config file as well.
As for range we usually cut off the tof data around 15 cm in front of the camera, so it usually has an effective range of ~0.15-5 meters
@Alex-Gardner I'm wondering if you can help me solve this problem or is there someone else on the development team who can provide support?
-
Hi,
Can you check in voxl-portal what the pointcloud
voxl_pc_outlooks like? this is the VOA pointcloud before the final bit of filtering to send it to the flight controller.Also check
/etc/modalai/extrinsics.confto make sure that it matches the transforms that are on your drone. -
Hi,
Can you check in voxl-portal what the pointcloud
voxl_pc_outlooks like? this is the VOA pointcloud before the final bit of filtering to send it to the flight controller.Also check
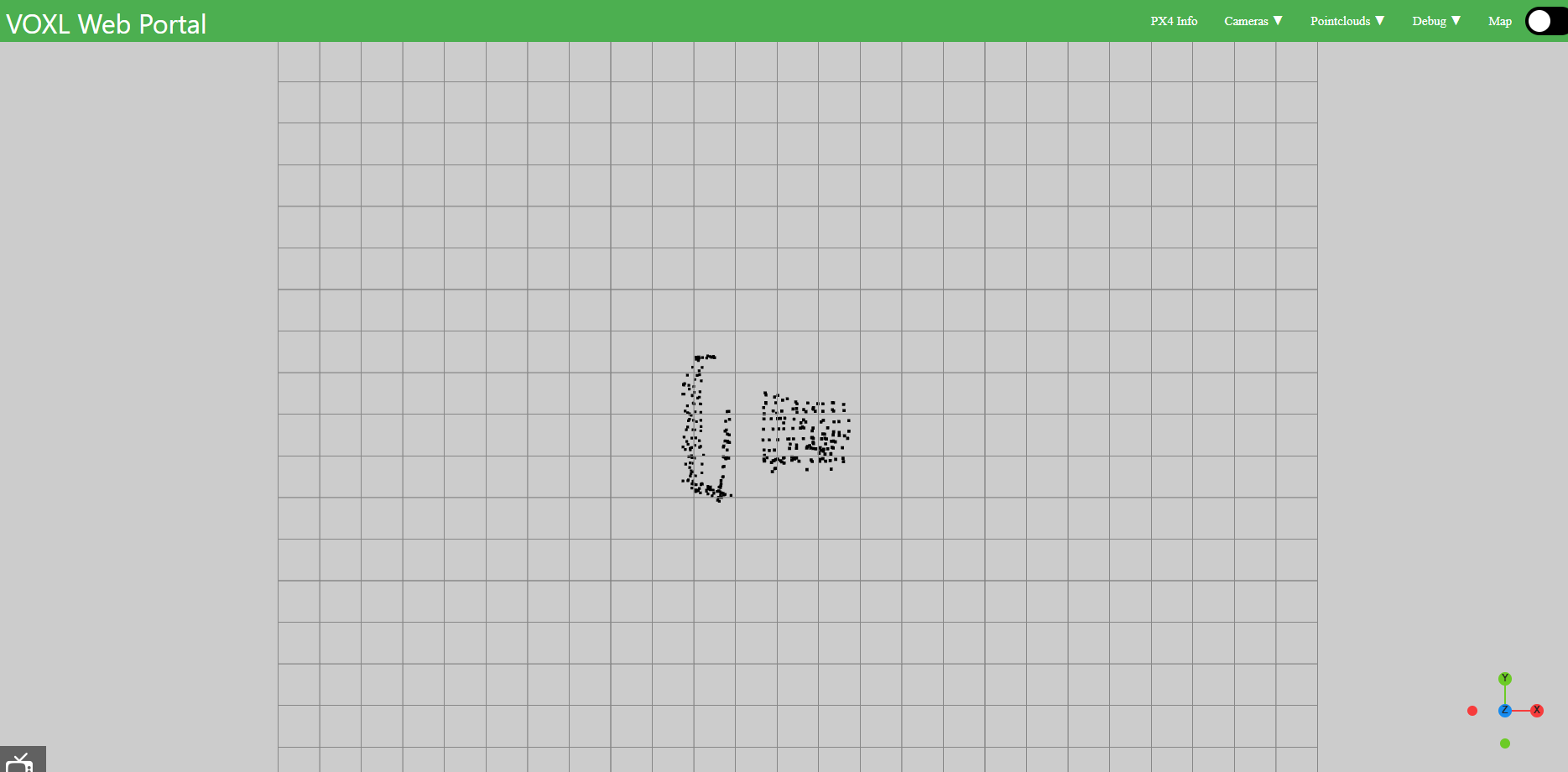
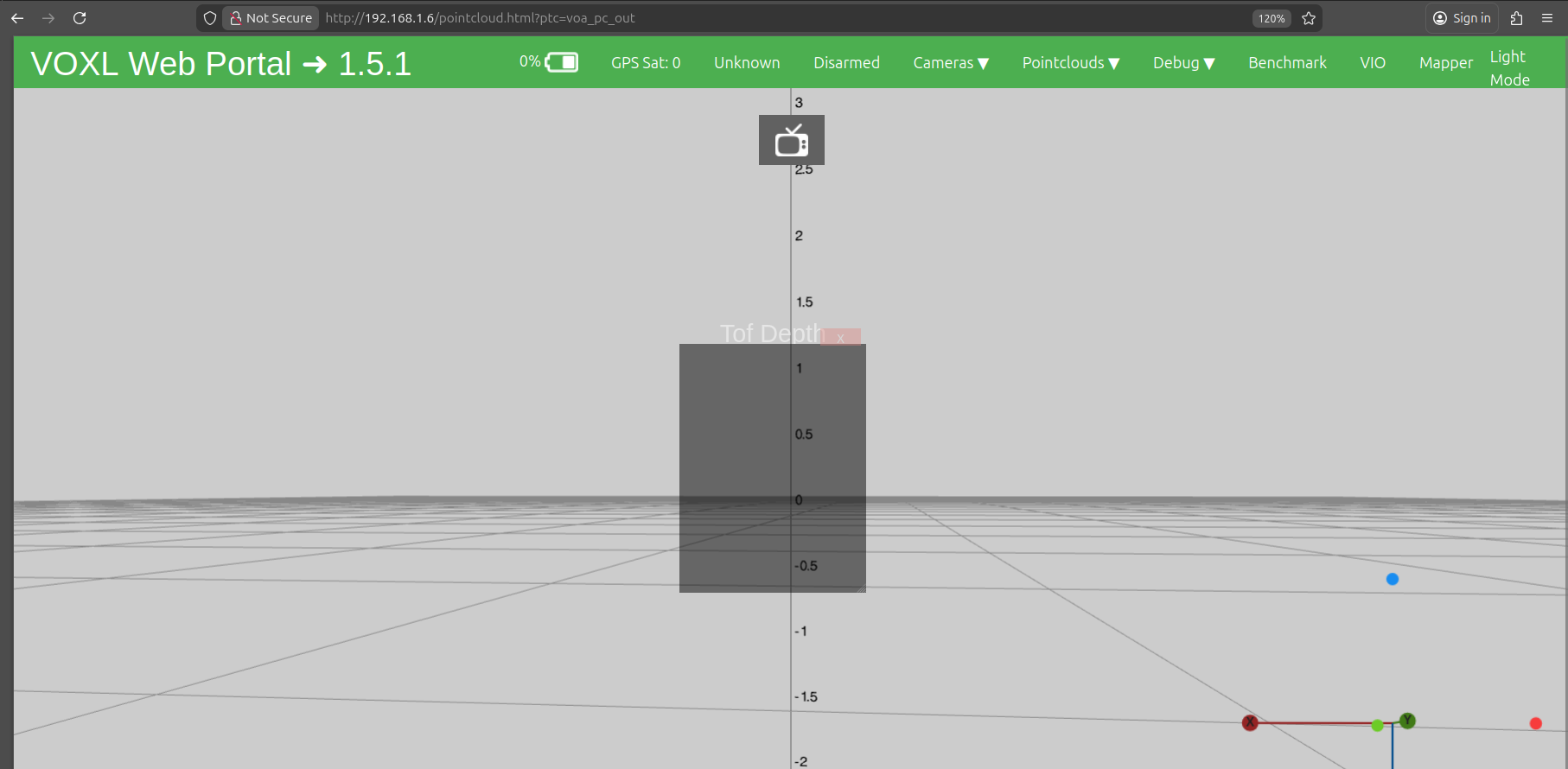
/etc/modalai/extrinsics.confto make sure that it matches the transforms that are on your drone.Hi @Alex-Gardner this is the screenshot of
voxl_pc_outin voxl-portal, at the same time this is the output ofvoxl-vision-px4 -sand this is the screenshot/etc/modalai/extrinsics.conf
-
your image of the voa_pc_out point cloud shows that your voxl thinks the TOF is pointing out the top of the drone. This is confirmed by your extrinsics conf sensor rotation: [180 0 0] which translates to a sensor pointing straight up.
-
your image of the voa_pc_out point cloud shows that your voxl thinks the TOF is pointing out the top of the drone. This is confirmed by your extrinsics conf sensor rotation: [180 0 0] which translates to a sensor pointing straight up.
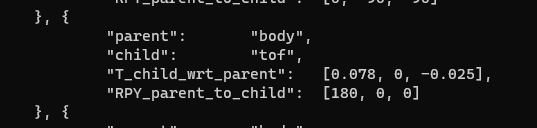
@James-Strawson Hii , I am also getting the same issue . Kindly look at the following details . I have defined tof in my extrinsics.conf file as given below:
parent: body
child: tof
T_child_wrt_parent: 0.070 0.024 -0.029
RPY_parent_to_child: 0.0 90.0 90.0
R_child_to_parent: 0.000 -0.000 1.000
1.000 0.000 -0.000
-0.000 1.000 0.000
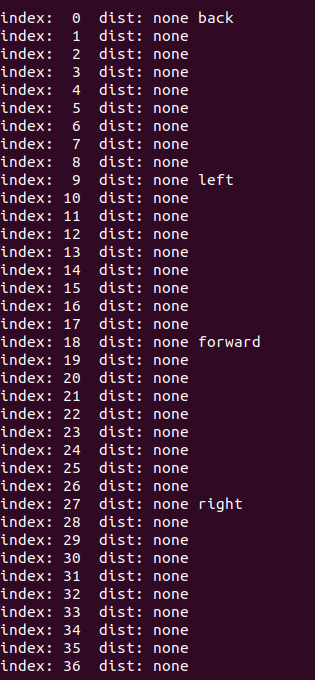
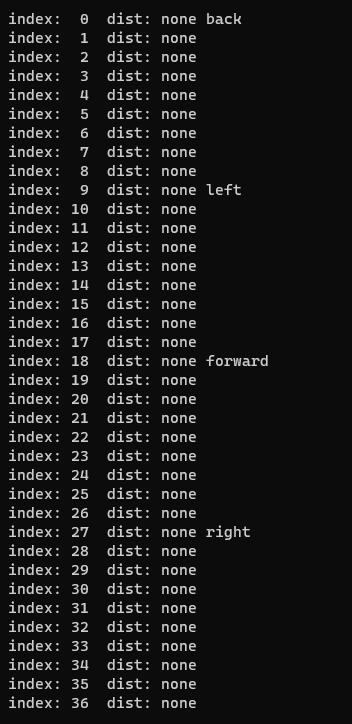
when i run voxl-vision-hub -s i got the following
slice 0 dist none back
slice 1 dist none
slice 2 dist none
slice 3 dist none
slice 4 dist none
slice 5 dist none
slice 6 dist none
slice 7 dist none
slice 8 dist none
slice 9 dist none left
slice 10 dist none
slice 11 dist none
slice 12 dist none
slice 13 dist none
slice 14 dist none
slice 15 dist none
slice 16 dist none
slice 17 dist none
slice 18 dist none forward
slice 19 dist none
slice 20 dist none
slice 21 dist none
slice 22 dist none
slice 23 dist none
slice 24 dist none
slice 25 dist none
slice 26 dist none
slice 27 dist none right
slice 28 dist none
and in my vision-hub-conf file i have the folloeing set up:
"en_vio": true,
"vio_pipe": "qvio",
"secondary_vio_pipe": "ov",
"vfc_vio_pipe": "ov",
"en_reset_vio_if_initialized_inverted": true,
"vio_warmup_s": 3,
"send_odom_while_failed": true,
"horizon_cal_tolerance": 0.5,
"en_hitl": false,
"offboard_mode": "figure_eight",
"follow_tag_id": 0,
"figure_eight_move_home": true,
"robot_radius": 0.300000011920929,
"collision_sampling_dt": 0.1,
"max_lookahead_distance": 1,
"backtrack_seconds": 60,
"backtrack_rc_chan": 8,
"backtrack_rc_thresh": 1500,
"wps_move_home": true,
"wps_stride": 0,
"wps_timeout": 0,
"wps_damp": 1,
"wps_vfc_mission": true,
"wps_vfc_mission_loop": false,
"wps_vfc_mission_to_ramp": 25,
"wps_vfc_mission_to_kp": 0.10000000149011612,
"wps_vfc_mission_cruise_speed": 1,
"en_tag_fixed_frame": false,
"fixed_frame_filter_len": 5,
"en_transform_mavlink_pos_setpoints_from_fixed_frame": false,
"vfc_rate": 100,
"vfc_rc_chan_min": 980,
"vfc_rc_chan_max": 2020,
"vfc_thrust_ch": 3,
"vfc_roll_ch": 1,
"vfc_pitch_ch": 2,
"vfc_yaw_ch": 4,
"vfc_submode_ch": 6,
"vfc_alt_mode_rc_min": 0,
"vfc_alt_mode_rc_max": 0,
"vfc_flow_mode_rc_min": 0,
"vfc_flow_mode_rc_max": 0,
"vfc_hybrid_flow_mode_rc_min": 0,
"vfc_hybrid_flow_mode_rc_max": 0,
"vfc_position_mode_rc_min": 0,
"vfc_position_mode_rc_max": 2100,
"vfc_traj_mode_rc_min": 0,
"vfc_traj_mode_rc_max": 0,
"vfc_yaw_deadband": 30,
"vfc_vxy_deadband": 50,
"vfc_vz_deadband": 150,
"vfc_min_thrust": 0,
"vfc_max_thrust": 0.800000011920929,
"vfc_tilt_max": 0.43599998950958252,
"vfc_yaw_rate_max": 3,
"vfc_thrust_hover": 0.5,
"vfc_vz_max": 1,
"vfc_kp_z": 5.2899999618530273,
"vfc_kd_z": 5.9800000190734863,
"vfc_vxy_max": 3,
"vfc_kp_xy": 0.63999998569488525,
"vfc_kd_xy": 2.559999942779541,
"vfc_kp_z_vio": 5.2899999618530273,
"vfc_kd_z_vio": 5.9800000190734863,
"vfc_kp_xy_vio": 3.2400000095367432,
"vfc_kd_xy_vio": 3.9600000381469727,
"vfc_w_filt_xy_vio": 10,
"vfc_w_filt_xy_flow": 3,
"vfc_vel_ff_factor_vio": 0.899999976158142,
"vfc_xy_acc_limit_vio": 2.5,
"vfc_max_z_delta": 3,
"vfc_att_transition_time": 0.5,
"vfc_stick_move_threshold": 30,
"vfc_flow_transition_time": 1,
"vfc_q_min": 10,
"vfc_points_min": 7,
"vfc_en_submode_announcement": 1,
"vfc_disable_fallback": false,
"vfc_traj_csv": "/data/voxl-vision-hub/traj.csv",
"en_voa": true,
"voa_upper_bound_m": -0.15000000596046448,
"voa_lower_bound_m": 0.15000000596046448,
"voa_memory_s": 1,
"voa_max_pc_per_fusion": 100,
"voa_pie_max_dist_m": 20,
"voa_pie_min_dist_m": 0.25,
"voa_pie_under_trim_m": 1,
"voa_pie_threshold": 3,
"voa_send_rate_hz": 20,
"voa_pie_slices": 36,
"voa_pie_bin_depth_m": 0.15000000596046448,
"voa_inputs": [{
"enabled": false,
"type": "point_cloud",
"input_pipe": "dfs_point_cloud",
"frame": "stereo_l",
"max_depth": 8,
"min_depth": 0.300000011920929,
"cell_size": 0.079999998211860657,
"threshold": 4,
"x_fov_deg": 68,
"y_fov_deg": 56,
"conf_cutoff": 0
}, {
"enabled": false,
"type": "point_cloud",
"input_pipe": "stereo_front_pc",
"frame": "stereo_front_l",
"max_depth": 8,
"min_depth": 0.300000011920929,
"cell_size": 0.079999998211860657,
"threshold": 4,
"x_fov_deg": 68,
"y_fov_deg": 56,
"conf_cutoff": 0
}, {
"enabled": false,
"type": "point_cloud",
"input_pipe": "stereo_rear_pc",
"frame": "stereo_rear_l",
"max_depth": 8,
"min_depth": 0.300000011920929,
"cell_size": 0.079999998211860657,
"threshold": 4,
"x_fov_deg": 68,
"y_fov_deg": 56,
"conf_cutoff": 0
}, {
"enabled": true,
"type": "tof",
"input_pipe": "tof",
"frame": "tof",
"max_depth": 6,
"min_depth": 0.15000000596046448,
"cell_size": 0.079999998211860657,
"threshold": 3,
"x_fov_deg": 106.5,
"y_fov_deg": 85.0999984741211,
"conf_cutoff": 125
}, {
"enabled": false,
"type": "rangefinder",
"input_pipe": "rangefinders",
"frame": "body",
"max_depth": 8,
"min_depth": 0.300000011920929,
"cell_size": 0.079999998211860657,
"threshold": 4,
"x_fov_deg": 68,
"y_fov_deg": 56,
"conf_cutoff": 0
}],
"voa_voa_memory_s": 1
}
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login