Why does QRB5 switch from Position mode to Hold mode?
-
Hi Dev Team,
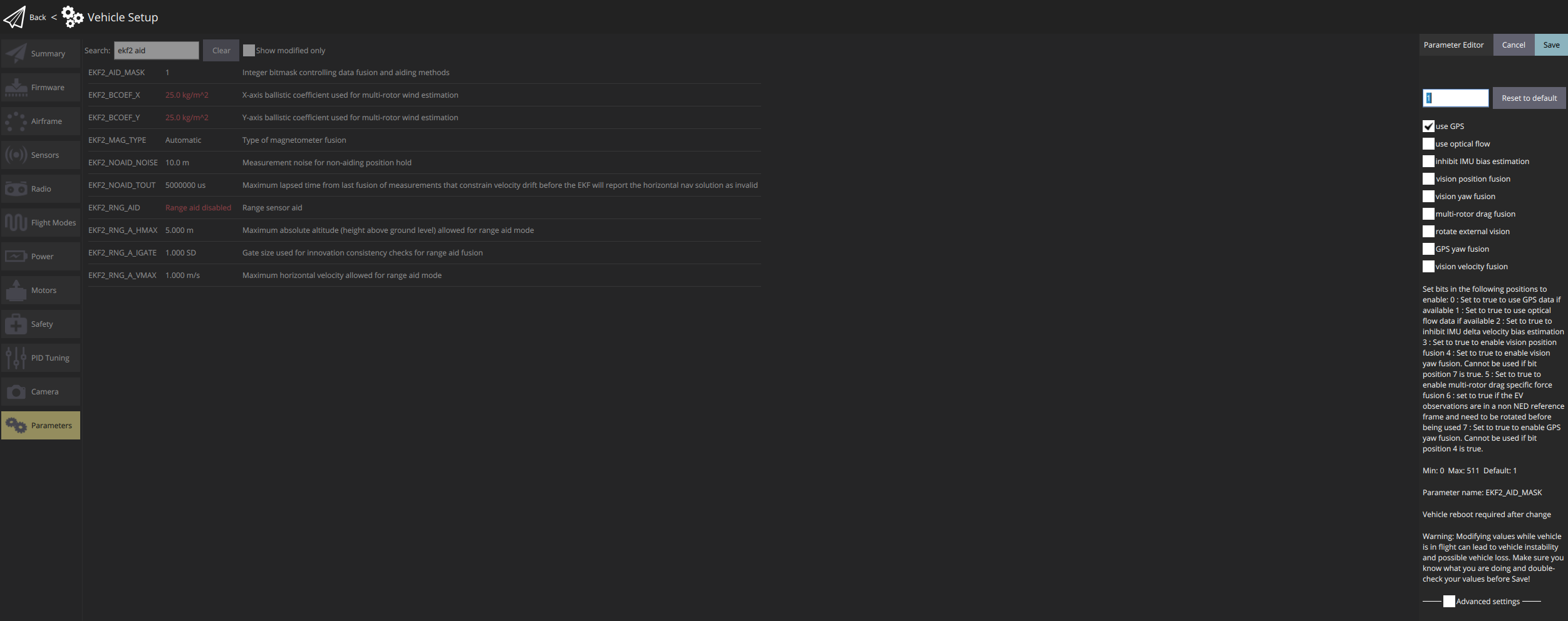
I flew the QRB5 in an outdoor environment with GPS only (
EKF2_AID_MASK=1, please see image EKF2_AID_MASK); and the GPS signal is very good (with 32 satellites, errors are below 0.8m).
However, whenever I switched the drone to Position mode, it automatically switched back to Hold mode after a few seconds.Do you know what is the reason and how to configure the drone to let it runs in Position mode without VIO? Thank you.
-
Actually, I realized that the Hold mode can be switched back to Position mode once I move sticks more than 30%. However, the switching from Position to Hold mode was too fast (i.e., within 1 second), so whatever changes during that time was discarded and after moving 30% of sticks in order to switch from Hold to Position, the Altitude is either too high or too low for the next move.
Do you know which parameters postpone the process of switching from Position to Hold mode? Thank you.
{kind=link}
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login