VOXL ToF sensor rotated
-
Hello,
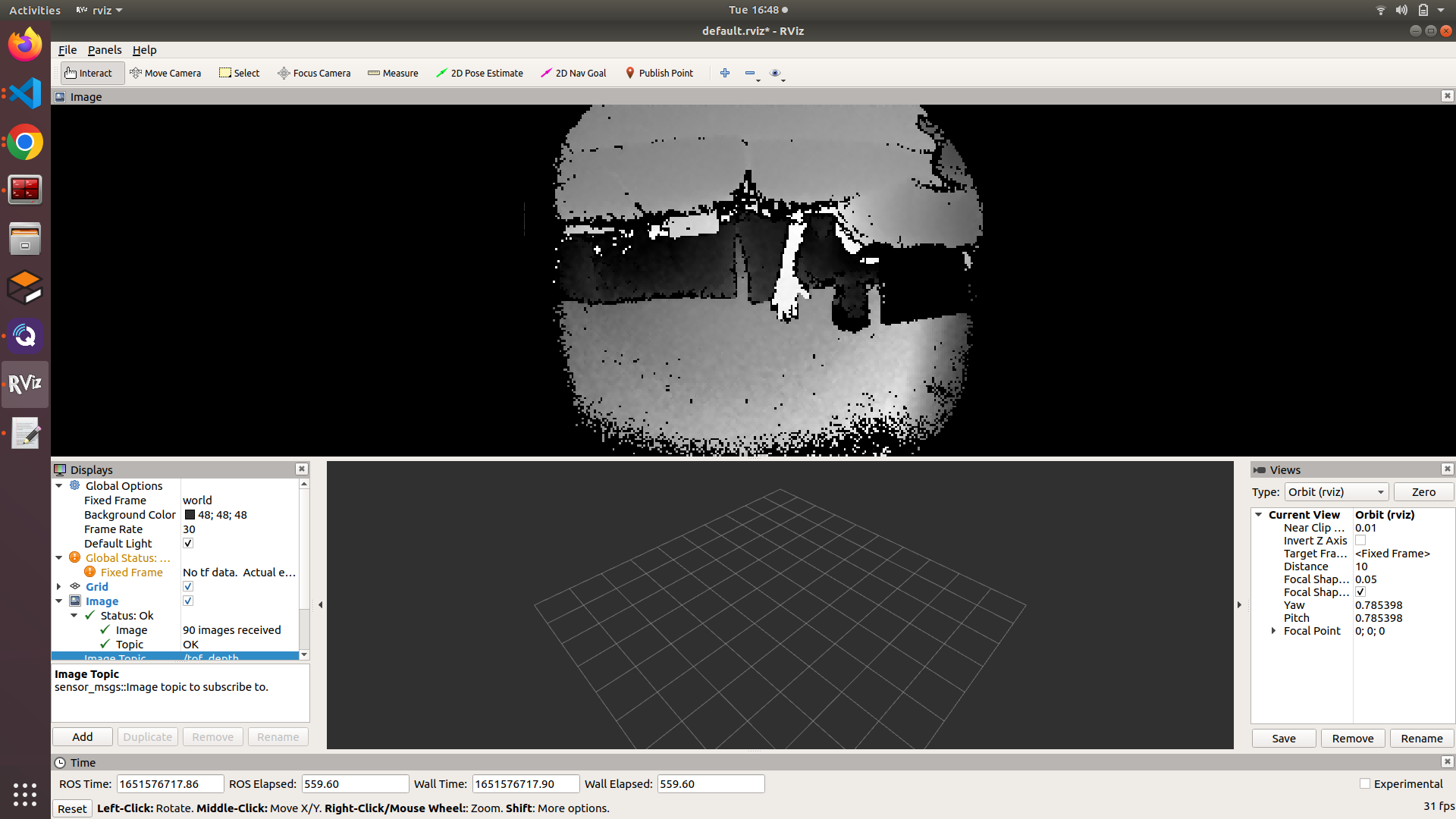
My VOXLCAM system image version is 3.3.0. I have configured voxl-camera-server to take input from tracking + stereo + tof sensors with option '7' on voxl-configure-cameras, wherein I was able to get rotated stereo sensor stream.My Tof depth sensor shows 180 degree rotated view which is inverted as compared to actual. How to rotate tof_depth sensor view by 180 degree again?
-
@James-Strawson @Chad-Sweet Any inputs on this issue? I wanted to have normal non inverted depth image for my further computation from hal3 library itself to avoid additional hops in the application.
-
Hello Aks,
I'm afraid there is no clean way in software to rotate the debug images other than copying the image byte-by-byte.
Typically we only use the tof_depth and tof_confidence image pipes for quick debug. voxl-vision-px4 makes real use of the sensor by subscribing to its full point cloud pipe and then projecting the 3D points into space using the known location and orientation of the TOF sensor as specified in /etc/modalai/extrinsics.conf
Best,
James -
Hello @James-Strawson Thanks for reverting back. That would make my application to subscribe to point cloud pipeline instead of depth image. It would have been better if depth image was up-right and not inverted.
I have couple of queries over voxl-vision-px4 functioning :
-
As per this document voxl-vision-px4 seems to be taking point cloud data from dfs_server (stereo camer's) and not from Tof. Can VOA work over Tof data?
-
Is there any direct tool/library to convert point cloud data from Tof/DFS to convert into FLU (forward left up) frame since that's conventional frame over which most of the path planner's work?
-
-
voxl-mapper is an example of taking TOF point cloud data and exercising path planning
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login