Error in px4_msgs while running ROS2 code
-
Hi,
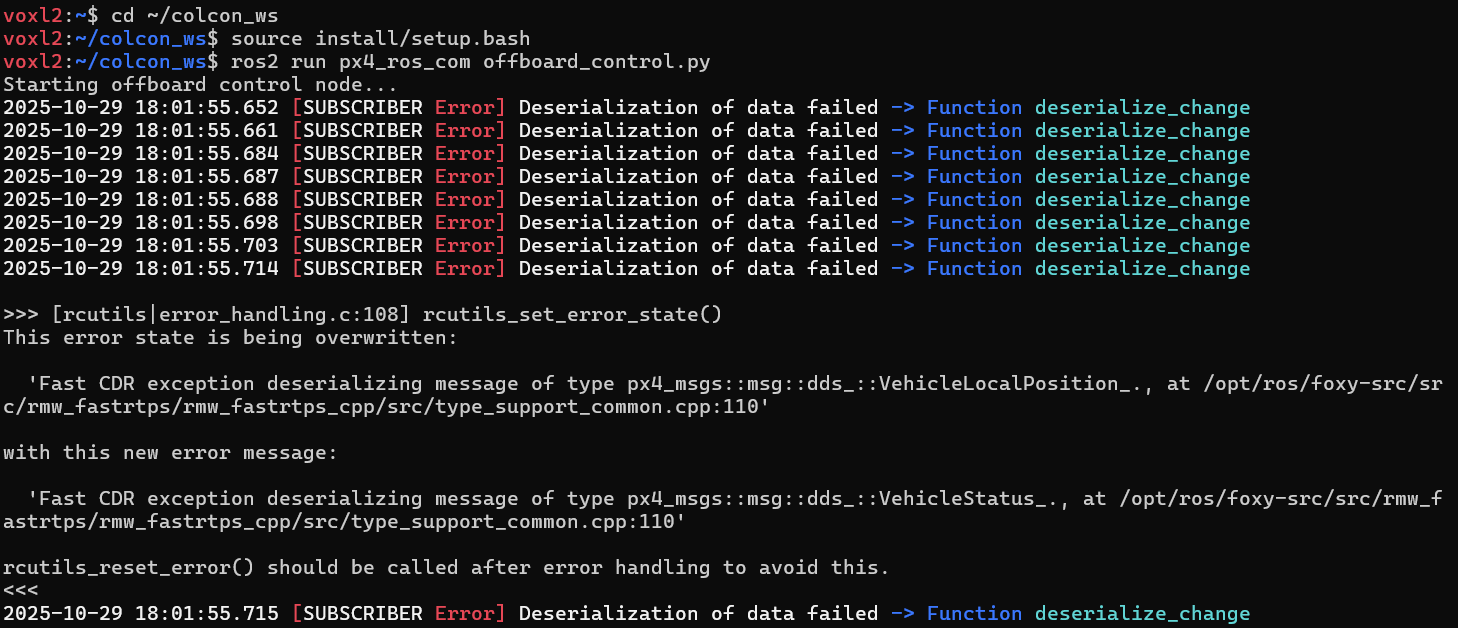
I'm using a Starling 2 Max drone. I've VOXL SDK 1.5.0 installed. I'm trying to fly a drone indoors using ROS2. Following the video in https://docs.modalai.com/building-ros2-nodes/, I installed ROS2, disabled offboard_mode in voxl-vision-hub, and confirmed that voxl-microodds-agent is working. Then I followed the instructions in that link to set up px4_msgs and px4_ros_com. Inside px4_ros_com, I am trying to run offboard_control.py and got an error. It arms the drone, but fails to proceed after that. Can you help me fix this issue?