Issues with M9N GPS and Ardupilot
-
Hi,
I am currently using a voxl 2 (SDK 1.4.0) running ardupilot version 4.7.0-4803bc14. I have attached a Holybro M9N GPS micro via the J19 connector. When using px4, I am seeing the GPS reading on the map for QGC, and the commandvoxl-inspect-gpsgives out the expected readings. We are trying to use ardupilot, and for some reason when disabling px4 and enabling ardupilot, I lose the ability to see the GPS in QGC and runningvoxl-inspect-gpsshows nothing - however the voxl still connects to QGC. In the documentation, most of the GPS information is linked to when using px4, can GPS be used with ardupilot? If so, how? -
Hi,
I am currently using a voxl 2 (SDK 1.4.0) running ardupilot version 4.7.0-4803bc14. I have attached a Holybro M9N GPS micro via the J19 connector. When using px4, I am seeing the GPS reading on the map for QGC, and the commandvoxl-inspect-gpsgives out the expected readings. We are trying to use ardupilot, and for some reason when disabling px4 and enabling ardupilot, I lose the ability to see the GPS in QGC and runningvoxl-inspect-gpsshows nothing - however the voxl still connects to QGC. In the documentation, most of the GPS information is linked to when using px4, can GPS be used with ardupilot? If so, how?@cguzikowski Yes, we have tested Ardupilot with GPS and have customers using Ardupilot with GPS. However, I don't know that anyone has ever tried with an M9N unit so perhaps there is some issue with that. Can you try with one of these: https://store.3dr.com/mini-gps-ublox-max-m10s/?
-
@cguzikowski Yes, we have tested Ardupilot with GPS and have customers using Ardupilot with GPS. However, I don't know that anyone has ever tried with an M9N unit so perhaps there is some issue with that. Can you try with one of these: https://store.3dr.com/mini-gps-ublox-max-m10s/?
@Eric-Katzfey Thank you for the response, we don't have that GPS and would like to try to get the M9N to work if possible. Is there any troubleshooting we can try before purchasing a new unit? PX4 has a .conf file in
/etc/modalai, I don't see one for Ardupilot, could this be an issue? I have also tried to tweak the parameters in the file/data/APM/defaults.parmand also through QGC, but have had no luck. -
@Eric-Katzfey Thank you for the response, we don't have that GPS and would like to try to get the M9N to work if possible. Is there any troubleshooting we can try before purchasing a new unit? PX4 has a .conf file in
/etc/modalai, I don't see one for Ardupilot, could this be an issue? I have also tried to tweak the parameters in the file/data/APM/defaults.parmand also through QGC, but have had no luck.@cguzikowski No, there is no Ardupilot configuration file needed in
/etc/modalai -
@cguzikowski No, there is no Ardupilot configuration file needed in
/etc/modalai@Eric-Katzfey We just got the m10s gps that you linked and are still having some trouble. Again when running px4 the gps works as expected, but running ardupilot seems to cause some issues. Getting the same behavior as the m9n, where running
voxl-inspect-gpshas no output:
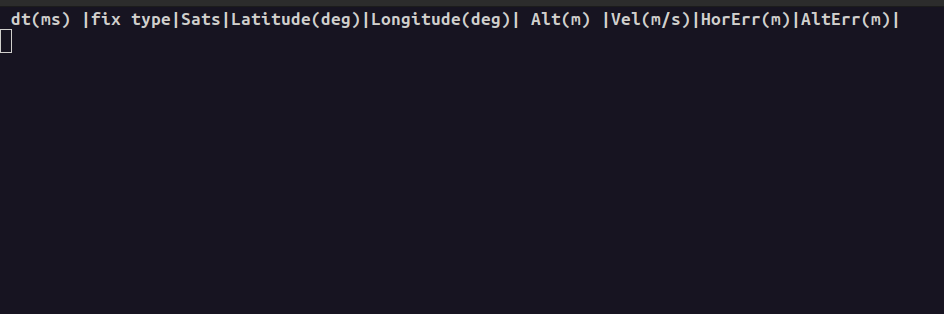
Any ideas on what to try next?
-
@Eric-Katzfey We just got the m10s gps that you linked and are still having some trouble. Again when running px4 the gps works as expected, but running ardupilot seems to cause some issues. Getting the same behavior as the m9n, where running
voxl-inspect-gpshas no output:
Any ideas on what to try next?
@cguzikowski I just downloaded the latest ArduPilot and loaded it on to my VOXL 2 with m10 GPS unit attached. It comes up and I can see that the GPS_RAW_INT message is being received at QGroundControl. The voxl-inspect-gps application does not print anything though so I'm not sure what's going on with that since it supposedly uses the Mavlink GPS_RAW_INT message to print the values. That will need to be looked into so don't rely on it for anything right now. If you look at QGroundControl Mavlink inspector do you not see the GPS_RAW_INT message coming in?
-
@cguzikowski I just downloaded the latest ArduPilot and loaded it on to my VOXL 2 with m10 GPS unit attached. It comes up and I can see that the GPS_RAW_INT message is being received at QGroundControl. The voxl-inspect-gps application does not print anything though so I'm not sure what's going on with that since it supposedly uses the Mavlink GPS_RAW_INT message to print the values. That will need to be looked into so don't rely on it for anything right now. If you look at QGroundControl Mavlink inspector do you not see the GPS_RAW_INT message coming in?
@Eric-Katzfey I see the GPS_RAW_INT message come in, but all of the fields are zeroed out and there is no cursor on the map:
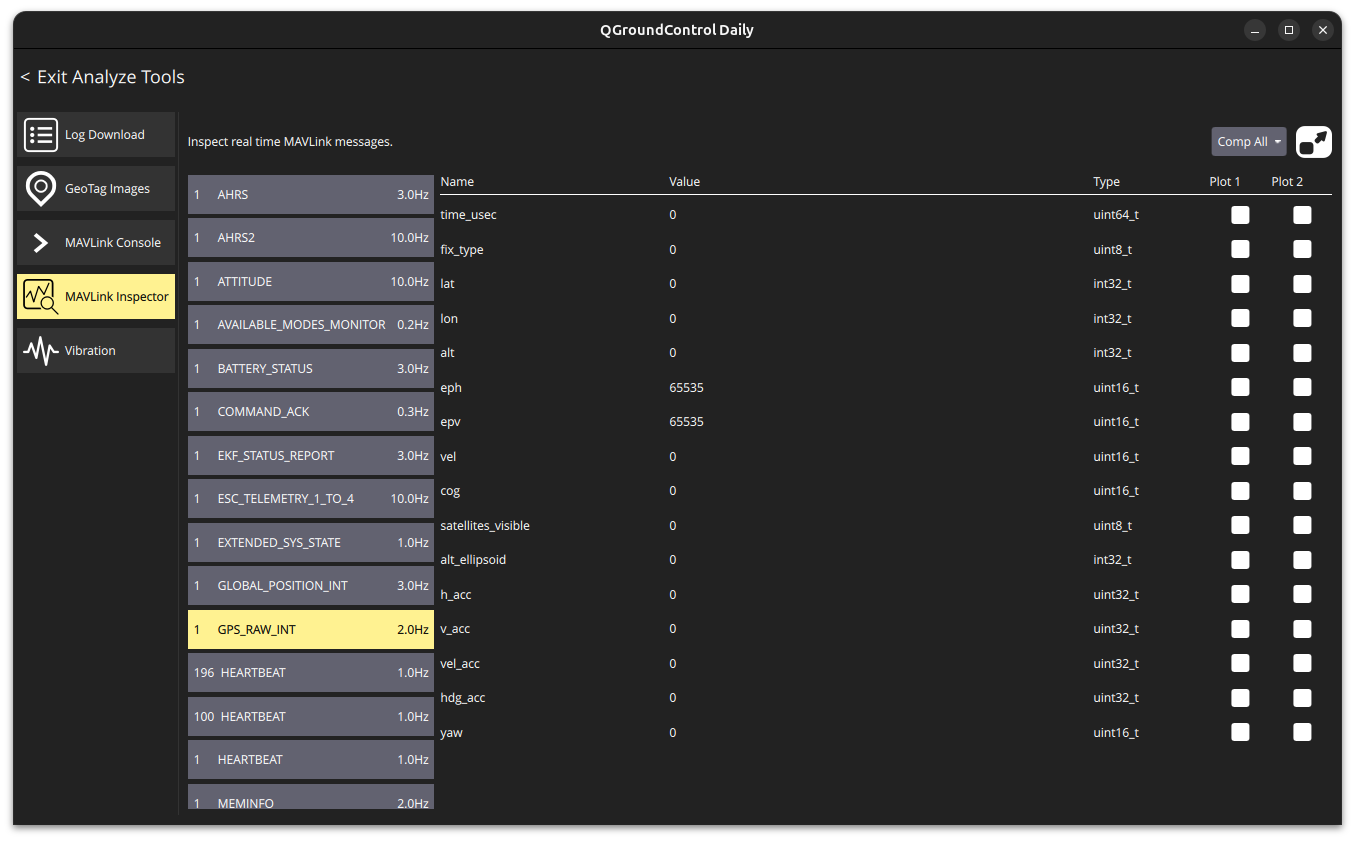
I tested it with PX4 and I was getting reasonable lat/lon positions along with all of the other data fields being filled out.
-
@Eric-Katzfey I see the GPS_RAW_INT message come in, but all of the fields are zeroed out and there is no cursor on the map:
I tested it with PX4 and I was getting reasonable lat/lon positions along with all of the other data fields being filled out.
@cguzikowski What else is connected to your VOXL2? Can you disconnect everything else besides the GPS and see if that makes any difference? Are you connected to the standard GPS pins on J19?
-
@cguzikowski What else is connected to your VOXL2? Can you disconnect everything else besides the GPS and see if that makes any difference? Are you connected to the standard GPS pins on J19?
@Eric-Katzfey I just had m0015 cameras connected to the J6 connected via a m0076 connector, which I have unplugged and the behavior still persists. I also have a 5G Modem Carrier Board connected with a doodle labs radio, can't unplug this though or else there is no connection to QGC. Yes, I am connected to the standard GPS pins on J19 which I believe to be connected properly, as QGC can detect the compass properly. I have tried swapping the TX and RX pin connections, but this resulted in the GPS to not even work with px4. The current configuration works just fine with PX4.
-
@Eric-Katzfey I just had m0015 cameras connected to the J6 connected via a m0076 connector, which I have unplugged and the behavior still persists. I also have a 5G Modem Carrier Board connected with a doodle labs radio, can't unplug this though or else there is no connection to QGC. Yes, I am connected to the standard GPS pins on J19 which I believe to be connected properly, as QGC can detect the compass properly. I have tried swapping the TX and RX pin connections, but this resulted in the GPS to not even work with px4. The current configuration works just fine with PX4.
@cguzikowski Hmmm, this is really odd. I am trying to replicate on my development board but it works fine in both px4 and ardupilot with the m10s unit. Can you update to latest SDK 1.5.0?
-
@cguzikowski Hmmm, this is really odd. I am trying to replicate on my development board but it works fine in both px4 and ardupilot with the m10s unit. Can you update to latest SDK 1.5.0?
@Eric-Katzfey Updated to 1.5.0 and the issue still persists - exact same behavior as before. Is it possible I am having an issue with my specific board? Our other board is currently in use but I can probably borrow it if necessary.
-
@Eric-Katzfey Updated to 1.5.0 and the issue still persists - exact same behavior as before. Is it possible I am having an issue with my specific board? Our other board is currently in use but I can probably borrow it if necessary.
@cguzikowski It's certainly worth a try.
-
@cguzikowski It's certainly worth a try.
@Eric-Katzfey On a fresh voxl I am getting the same behavior unfortunately. Any other troubleshooting tips?
-
@cguzikowski It's certainly worth a try.
@Eric-Katzfey okay a little weird but I opened QGC to test something else out today and both the M9N and M10S work just fine with ardupilot... Not sure what is going on there.
-
@Eric-Katzfey okay a little weird but I opened QGC to test something else out today and both the M9N and M10S work just fine with ardupilot... Not sure what is going on there.
@cguzikowski Yes, very odd. Hopefully it just works now

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login