RB5 System Clock Issues
-
Hello,
We've noticed that on our RB5, the system clock seems very unstable, even with chrony disabled and internet off.
We have captured system clock vs steady (monotonic) clock, and plotted the difference in time.
For the RB5, it appears that that a bias is randomly introduced, almost as if something is trying and failing to synchronize the system clock.
See the following plots, showing the issue on RB5 vs m500.
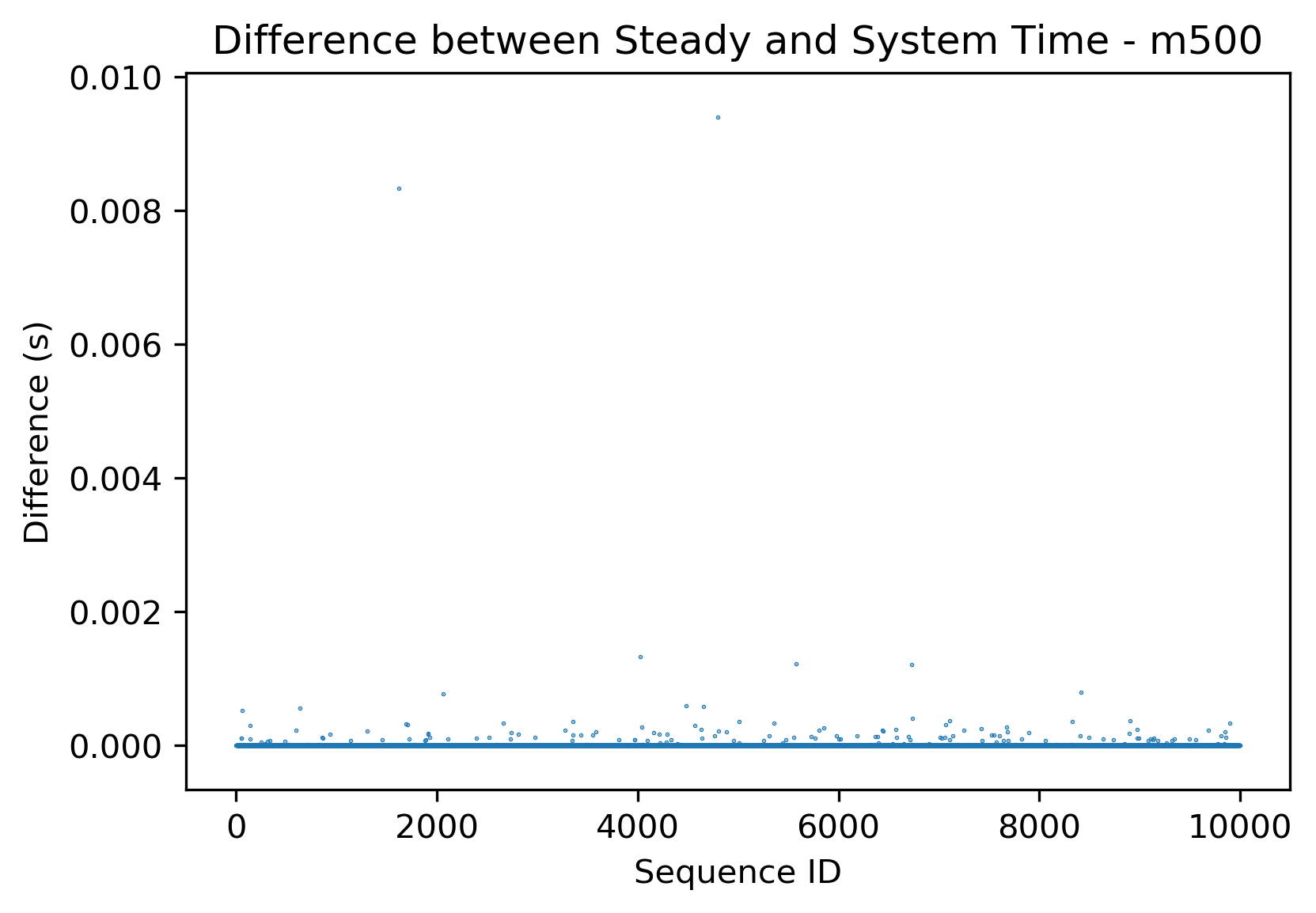
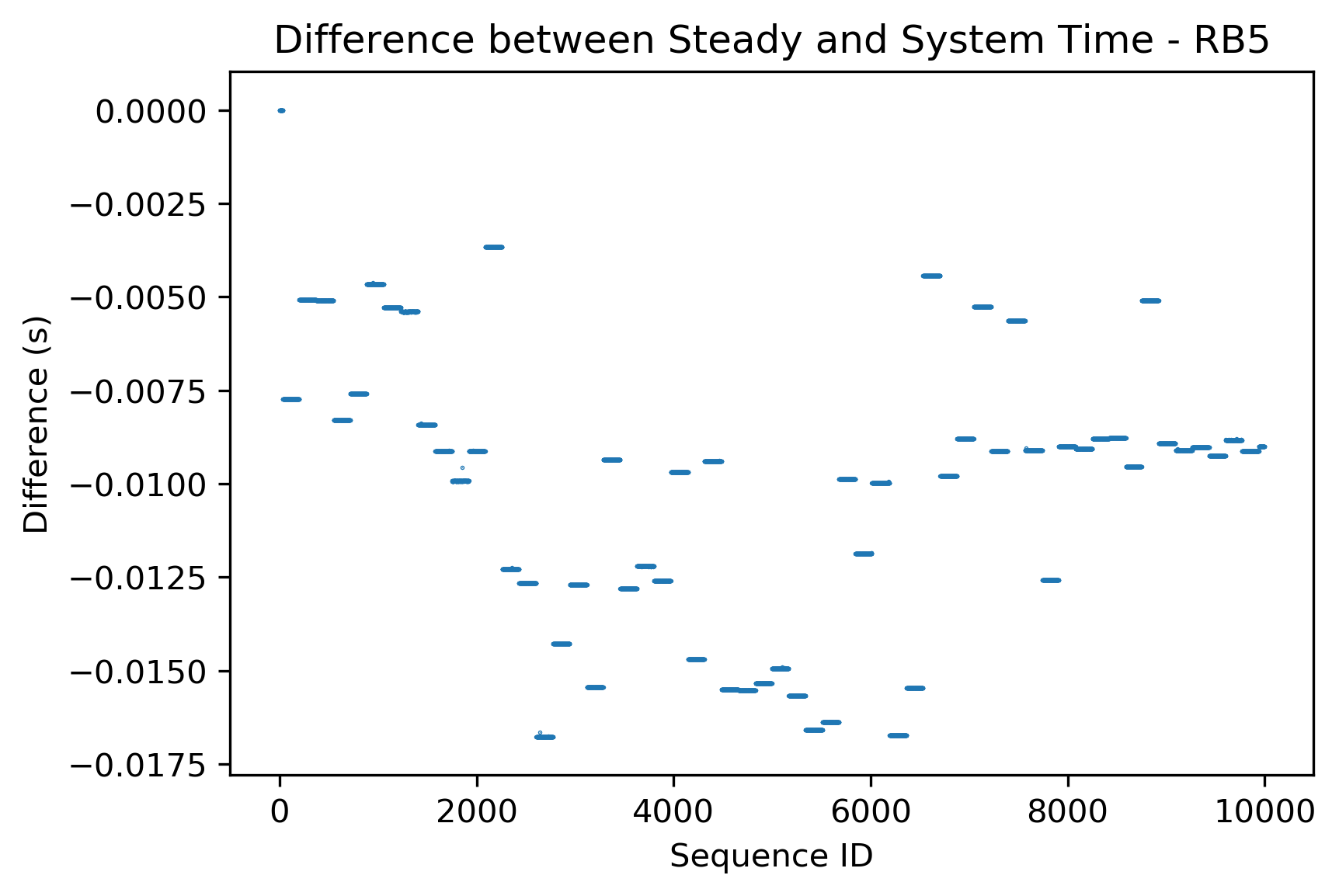
This issue makes the system clock unusable. How can we resolve this issue for the RB5? This causes big problems when using ROS, because ROS uses the system clock for timing.
Using SDK 0.9.5 on RB5, see this post for additional system information: https://forum.modalai.com/post/11990
Here is a script you can use to reproduce these issues:
#include <iomanip> #include <fstream> #include <chrono> #include <iostream> #include <thread> int main(int argc, char **argv) { // Create file to record clock stamps std::ofstream filestream; filestream.open("clocks_log.csv"); if (!filestream.is_open()) { std::cerr << "Could not open log file" << std::endl; return 1; } // Write CSV headers to the file filestream << "chrono_system_clock,chrono_steady_clock\n"; // Record stamps to 9 decimal places filestream << std::fixed << std::setprecision(9); // Define variables for storing time std::chrono::steady_clock::time_point steady_stamp; std::chrono::system_clock::time_point system_stamp; // Capture start time for both clocks const std::chrono::steady_clock::time_point steady_start = std::chrono::steady_clock::now(); const std::chrono::system_clock::time_point system_start = std::chrono::system_clock::now(); for (int i=0; i < 60000; ++i) { // Capture time stamps for both clocks steady_stamp = std::chrono::steady_clock::now(); system_stamp = std::chrono::system_clock::now(); // Capture change in time since start (in seconds) auto steady_seconds = std::chrono::duration<double>(steady_stamp - steady_start).count(); auto system_seconds = std::chrono::duration<double>(system_stamp - system_start).count(); filestream << system_seconds << "," << steady_seconds << "\n"; // Note that this is not an expected stamp dt std::this_thread::sleep_for(std::chrono::microseconds(1000)); } // Close the file filestream.close(); return 0; };You can then run this python script to visualize the data:
import pandas as pd df = pd.read_csv('clocks_log.csv', dtype=np.float64) # Plot the differences in each time series versus chrono steady plt.title("Difference between Steady and System Time") plt.scatter(df.index, df['chrono_system_clock'] - df['chrono_steady_clock'], 0.1) plt.ylabel('Difference (s)') plt.xlabel('Sequence ID') plt.show()Again, no issues for us when testing on our own PCs or on the m500, but significant issues on the RB5.
-
E eric referenced this topic on
-
Hello,
We've noticed that on our RB5, the system clock seems very unstable, even with chrony disabled and internet off.
We have captured system clock vs steady (monotonic) clock, and plotted the difference in time.
For the RB5, it appears that that a bias is randomly introduced, almost as if something is trying and failing to synchronize the system clock.
See the following plots, showing the issue on RB5 vs m500.
This issue makes the system clock unusable. How can we resolve this issue for the RB5? This causes big problems when using ROS, because ROS uses the system clock for timing.
Using SDK 0.9.5 on RB5, see this post for additional system information: https://forum.modalai.com/post/11990
Here is a script you can use to reproduce these issues:
#include <iomanip> #include <fstream> #include <chrono> #include <iostream> #include <thread> int main(int argc, char **argv) { // Create file to record clock stamps std::ofstream filestream; filestream.open("clocks_log.csv"); if (!filestream.is_open()) { std::cerr << "Could not open log file" << std::endl; return 1; } // Write CSV headers to the file filestream << "chrono_system_clock,chrono_steady_clock\n"; // Record stamps to 9 decimal places filestream << std::fixed << std::setprecision(9); // Define variables for storing time std::chrono::steady_clock::time_point steady_stamp; std::chrono::system_clock::time_point system_stamp; // Capture start time for both clocks const std::chrono::steady_clock::time_point steady_start = std::chrono::steady_clock::now(); const std::chrono::system_clock::time_point system_start = std::chrono::system_clock::now(); for (int i=0; i < 60000; ++i) { // Capture time stamps for both clocks steady_stamp = std::chrono::steady_clock::now(); system_stamp = std::chrono::system_clock::now(); // Capture change in time since start (in seconds) auto steady_seconds = std::chrono::duration<double>(steady_stamp - steady_start).count(); auto system_seconds = std::chrono::duration<double>(system_stamp - system_start).count(); filestream << system_seconds << "," << steady_seconds << "\n"; // Note that this is not an expected stamp dt std::this_thread::sleep_for(std::chrono::microseconds(1000)); } // Close the file filestream.close(); return 0; };You can then run this python script to visualize the data:
import pandas as pd df = pd.read_csv('clocks_log.csv', dtype=np.float64) # Plot the differences in each time series versus chrono steady plt.title("Difference between Steady and System Time") plt.scatter(df.index, df['chrono_system_clock'] - df['chrono_steady_clock'], 0.1) plt.ylabel('Difference (s)') plt.xlabel('Sequence ID') plt.show()Again, no issues for us when testing on our own PCs or on the m500, but significant issues on the RB5.
@Moderator, has anyone been able to replicate this issue? Is this there a known solution to this?
-
@Moderator, has anyone been able to replicate this issue? Is this there a known solution to this?
@Moderator, we've observed that when we kill voxl-px4-imu-server, the timing discrepancy disappears. We of course need this to be running to get IMU data, but this process at least seems to be related to the issue.
-
@Moderator, we've observed that when we kill voxl-px4-imu-server, the timing discrepancy disappears. We of course need this to be running to get IMU data, but this process at least seems to be related to the issue.
FWIW, we are not seeing this issue on the VOXL2 flightdeck (which does not use voxl-px4-imu-server)
@Moderator Is there someone else I should tag for this issue if you are unable to provide support?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login