Segmentation fault camera server with voxl2 sdk 1.0.0-beta4
-
Hello,
I recently received voxl2 SDK 1.0.0-beta4 along with system image 1.6.2-M0054-14.1a-perf. I installed this system image and voxl suite on my VOXL2 hardware board. My desired camera configuration is hires (imx214) + tracking (ov7251) + TOF. I configured this via voxl-camera-configure 6. After this config I restarted voxl2 and checked if I am having pipes up for all three cameras but they dosent seems to be working. Please find verbose logs below. Also with same hardware connections if I configure one camera at a time or even hires + tof and tof + tracking, they work well but all three cameras together aren't working. Please helpvoxl2:/$ voxl-camera-server -d 0 getting fresh defaults for cam type pmf-tof getting fresh defaults for cam type imx214 getting fresh defaults for cam type ov7251 ================================================================= configuration for 3 cameras: cam #0 name: tof sensor type: pmd-tof isEnabled: 1 camId: 0 camId2: -1 fps: 5 en_preview: 1 pre_width: 224 pre_height: 1557 pre_format: tof en_small_video: 0 small_video_width: -1 small_video_height: -1 small_video_bitrate: -1 (bps) en_large_video: 0 large_video_width: -1 large_video_height: -1 large_video_bitrate: -1 (bps) en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: off standby_enabled: 0 decimator: 0 independent_exposure:0 cam #1 name: hires sensor type: imx214 isEnabled: 1 camId: 1 camId2: -1 fps: 30 en_preview: 0 pre_width: 640 pre_height: 480 pre_format: nv21 en_small_video: 1 small_video_width: 1024 small_video_height: 768 small_video_bitrate: 3000000 (bps) en_large_video: 1 large_video_width: 4096 large_video_height: 2160 large_video_bitrate: 120000000 (bps) en_snapshot: 1 snap_width: 4160 snap_height: 3120 ae_mode: isp standby_enabled: 0 decimator: 0 independent_exposure:0 cam #2 name: tracking sensor type: ov7251 isEnabled: 1 camId: 2 camId2: -1 fps: 30 en_preview: 1 pre_width: 640 pre_height: 480 pre_format: raw8 en_small_video: 0 small_video_width: -1 small_video_height: -1 small_video_bitrate: -1 (bps) en_large_video: 0 large_video_width: -1 large_video_height: -1 large_video_bitrate: -1 (bps) en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: lme_msv standby_enabled: 0 decimator: 0 independent_exposure:0 ================================================================= DEBUG: ------ voxl-camera-server: Starting 3 cameras Starting Camera: tof DEBUG: Attempting to open the hal module DEBUG: SUCCESS: Camera module opened on attempt 0 DEBUG: ----------- Number of cameras: 1 DEBUG: Cam idx: 0, Cam slot: 0, Slave Address: 0x007A, Sensor Id: 0x003D VERBOSE: Successfully found configuration match for camera 0: 224x1557 VERBOSE: Adding preview stream for camera: 0 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: Successfully set up pipeline for stream: PREVIEW VERBOSE: Entered thread: cam0-request(tid: 5907) DEBUG: Started Camera: tof Starting Camera: hires VERBOSE: Entered thread: cam0-result(tid: 5908) Segmentation fault: VERBOSE: Found Royale module config: imagerType 2, illuminationConfig.dutyCycle: 4 temp_sensor_type: 5 Fault thread: voxl-camera-ser(tid: 5887) Fault address: 0x567d8f0f4c Address not mapped. VERBOSE: Found Royale module config: maxImgW 224 maxImgH 172 frameTxMode 1 camName X1.1_850nm_2W VERBOSE: Found Royale module config: tempLimitSoft 60.000000 tempLimitHard 65.000000 autoExpoSupported yes VERBOSE: Found Royale usecase: MODE_9_5FPS - phases: 9 fps: 5 VERBOSE: Found Royale usecase: MODE_9_5FPS - exposure group[0] = gray VERBOSE: Found Royale usecase: MODE_9_5FPS - exposure group[1] = mod1 VERBOSE: Found Royale usecase: MODE_9_5FPS - exposure group[2] = mod2 VERBOSE: Found Royale usecase: MODE_9_5FPS - exp_limit[0] = (8 2200) VERBOSE: Found Royale usecase: MODE_9_5FPS - exp_limit[1] = (8 2200) VERBOSE: Found Royale usecase: MODE_9_5FPS - exp_limit[2] = (8 2200) VERBOSE: Found Royale usecase: MODE_9_5FPS - exp_time[0] = 200 VERBOSE: Found Royale usecase: MODE_9_5FPS - exp_time[1] = 2200 VERBOSE: Found Royale usecase: MODE_9_5FPS - exp_time[2] = 2200 Segmentation fault@Eric-Katzfey. I got beta release few days back on request basis. Please help on above problem.
-
Hello,
I recently received voxl2 SDK 1.0.0-beta4 along with system image 1.6.2-M0054-14.1a-perf. I installed this system image and voxl suite on my VOXL2 hardware board. My desired camera configuration is hires (imx214) + tracking (ov7251) + TOF. I configured this via voxl-camera-configure 6. After this config I restarted voxl2 and checked if I am having pipes up for all three cameras but they dosent seems to be working. Please find verbose logs below. Also with same hardware connections if I configure one camera at a time or even hires + tof and tof + tracking, they work well but all three cameras together aren't working. Please helpvoxl2:/$ voxl-camera-server -d 0 getting fresh defaults for cam type pmf-tof getting fresh defaults for cam type imx214 getting fresh defaults for cam type ov7251 ================================================================= configuration for 3 cameras: cam #0 name: tof sensor type: pmd-tof isEnabled: 1 camId: 0 camId2: -1 fps: 5 en_preview: 1 pre_width: 224 pre_height: 1557 pre_format: tof en_small_video: 0 small_video_width: -1 small_video_height: -1 small_video_bitrate: -1 (bps) en_large_video: 0 large_video_width: -1 large_video_height: -1 large_video_bitrate: -1 (bps) en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: off standby_enabled: 0 decimator: 0 independent_exposure:0 cam #1 name: hires sensor type: imx214 isEnabled: 1 camId: 1 camId2: -1 fps: 30 en_preview: 0 pre_width: 640 pre_height: 480 pre_format: nv21 en_small_video: 1 small_video_width: 1024 small_video_height: 768 small_video_bitrate: 3000000 (bps) en_large_video: 1 large_video_width: 4096 large_video_height: 2160 large_video_bitrate: 120000000 (bps) en_snapshot: 1 snap_width: 4160 snap_height: 3120 ae_mode: isp standby_enabled: 0 decimator: 0 independent_exposure:0 cam #2 name: tracking sensor type: ov7251 isEnabled: 1 camId: 2 camId2: -1 fps: 30 en_preview: 1 pre_width: 640 pre_height: 480 pre_format: raw8 en_small_video: 0 small_video_width: -1 small_video_height: -1 small_video_bitrate: -1 (bps) en_large_video: 0 large_video_width: -1 large_video_height: -1 large_video_bitrate: -1 (bps) en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: lme_msv standby_enabled: 0 decimator: 0 independent_exposure:0 ================================================================= DEBUG: ------ voxl-camera-server: Starting 3 cameras Starting Camera: tof DEBUG: Attempting to open the hal module DEBUG: SUCCESS: Camera module opened on attempt 0 DEBUG: ----------- Number of cameras: 1 DEBUG: Cam idx: 0, Cam slot: 0, Slave Address: 0x007A, Sensor Id: 0x003D VERBOSE: Successfully found configuration match for camera 0: 224x1557 VERBOSE: Adding preview stream for camera: 0 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128 DEBUG: Successfully set up pipeline for stream: PREVIEW VERBOSE: Entered thread: cam0-request(tid: 5907) DEBUG: Started Camera: tof Starting Camera: hires VERBOSE: Entered thread: cam0-result(tid: 5908) Segmentation fault: VERBOSE: Found Royale module config: imagerType 2, illuminationConfig.dutyCycle: 4 temp_sensor_type: 5 Fault thread: voxl-camera-ser(tid: 5887) Fault address: 0x567d8f0f4c Address not mapped. VERBOSE: Found Royale module config: maxImgW 224 maxImgH 172 frameTxMode 1 camName X1.1_850nm_2W VERBOSE: Found Royale module config: tempLimitSoft 60.000000 tempLimitHard 65.000000 autoExpoSupported yes VERBOSE: Found Royale usecase: MODE_9_5FPS - phases: 9 fps: 5 VERBOSE: Found Royale usecase: MODE_9_5FPS - exposure group[0] = gray VERBOSE: Found Royale usecase: MODE_9_5FPS - exposure group[1] = mod1 VERBOSE: Found Royale usecase: MODE_9_5FPS - exposure group[2] = mod2 VERBOSE: Found Royale usecase: MODE_9_5FPS - exp_limit[0] = (8 2200) VERBOSE: Found Royale usecase: MODE_9_5FPS - exp_limit[1] = (8 2200) VERBOSE: Found Royale usecase: MODE_9_5FPS - exp_limit[2] = (8 2200) VERBOSE: Found Royale usecase: MODE_9_5FPS - exp_time[0] = 200 VERBOSE: Found Royale usecase: MODE_9_5FPS - exp_time[1] = 2200 VERBOSE: Found Royale usecase: MODE_9_5FPS - exp_time[2] = 2200 Segmentation fault@Eric-Katzfey. I got beta release few days back on request basis. Please help on above problem.
-
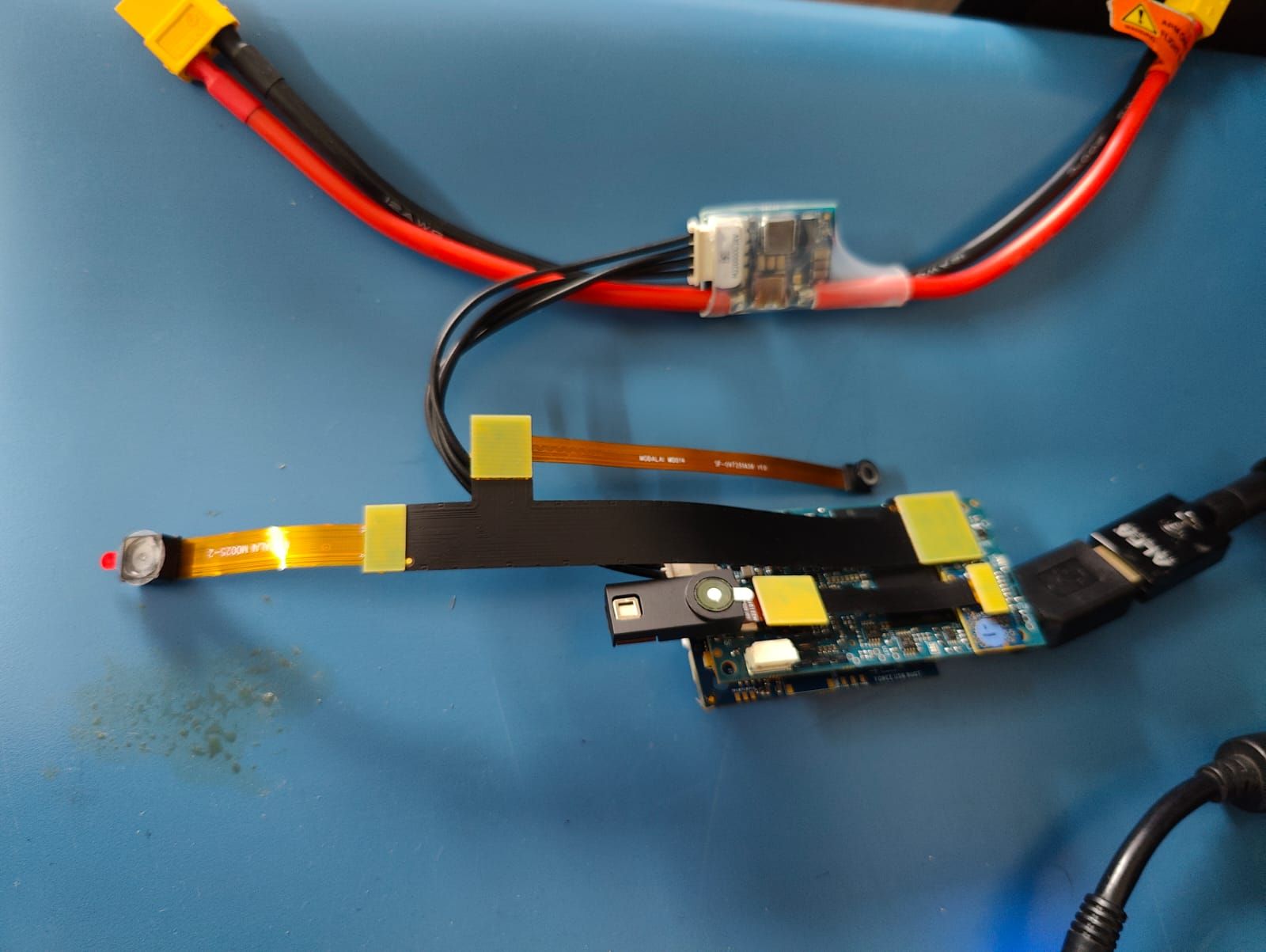
@Aaky Can you post a picture of your camera / hardware setup so we can see which orientation / port each sensor is connected to?
-
@tom Please find attached picture of all three cameras connected to VOXL2 as per standard camera config C6. Also with this hardware connections I can see C4,C8,C9 camera config work successfully but just not C6.
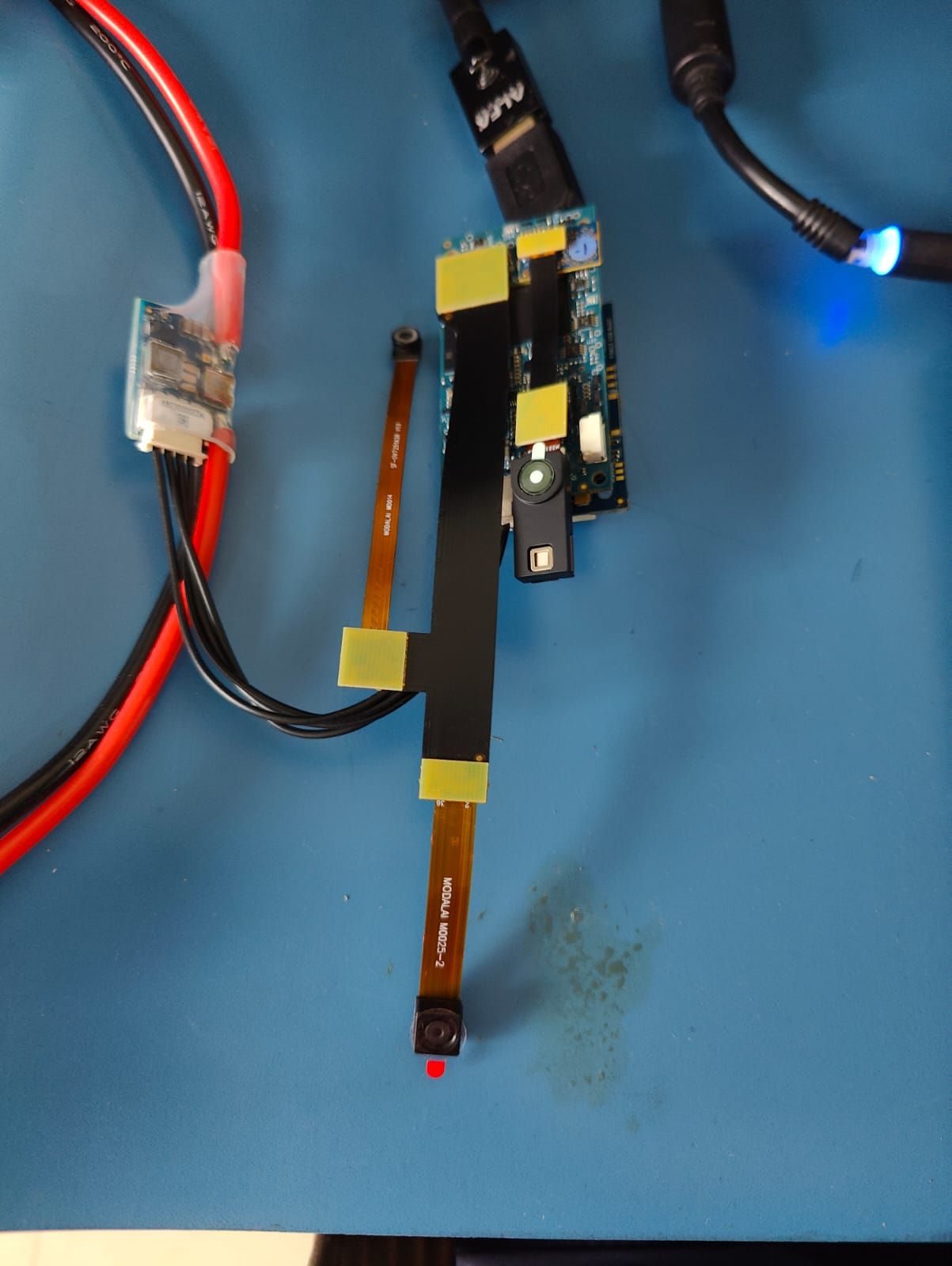
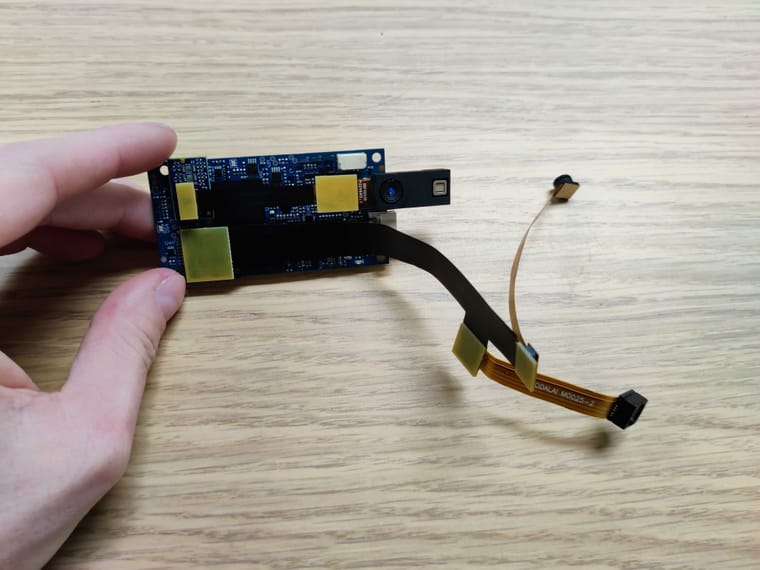
@Aaky The C6 camera config was moved around a bit in the beta4 release. Not documented at all so absolutely not your fault for following what is on our docs. We may switch it back to the way you have it there but for the time being the workaround is to arrange your cameras as seen in this pic:
-
@Aaky The C6 camera config was moved around a bit in the beta4 release. Not documented at all so absolutely not your fault for following what is on our docs. We may switch it back to the way you have it there but for the time being the workaround is to arrange your cameras as seen in this pic:
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login