@Cliff-Wong
Hey
I will try to input custom indoor maps with QGC.
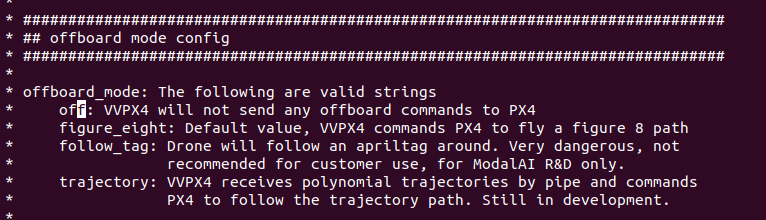
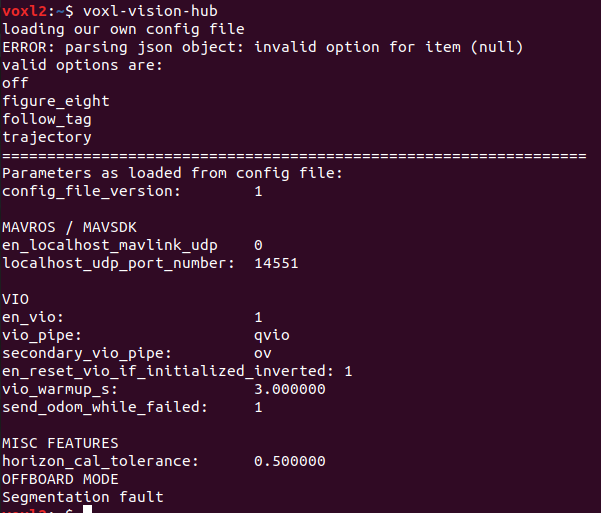
How can i configure voxl-vision-hub for waypoint-style navigation?
In the latest configration setups for SDK 1.2, only 4 configrations are there
Posts made by Jetson Nano
-
RE: VIO waypoint navigationposted in VOXL SDK
-
RE: VIO waypoint navigationposted in VOXL SDK
@Cliff-Wong
Heyy,
How do I do even set waypoints for Indoors with QGC? -
RE: Considerate VIO drift (z-axis) in Starling V2.posted in Starling
Thanks for your suggestions.
I could not use mapper with SDK 1.1.3, and the old qrb5165-imu-server (0.6.0). During "apt-get install voxl-mapper", it said that the mapper needed imu version >=1.0.1. I also want to report that I tried these tests with SDK 1.2.0.
SDK 1.2.0 performs well and has no z-axis drift issue. So there is no z-axis drift in SDK 1.0.0 and 1.2.0.
There is a different issue about the VIO now,
After consistent testing, drifts accumulate much faster, making point-to-point planning hard. The VIO drift was visible in the Figure-eight offboard mode. This is not just in SDK 1.2.0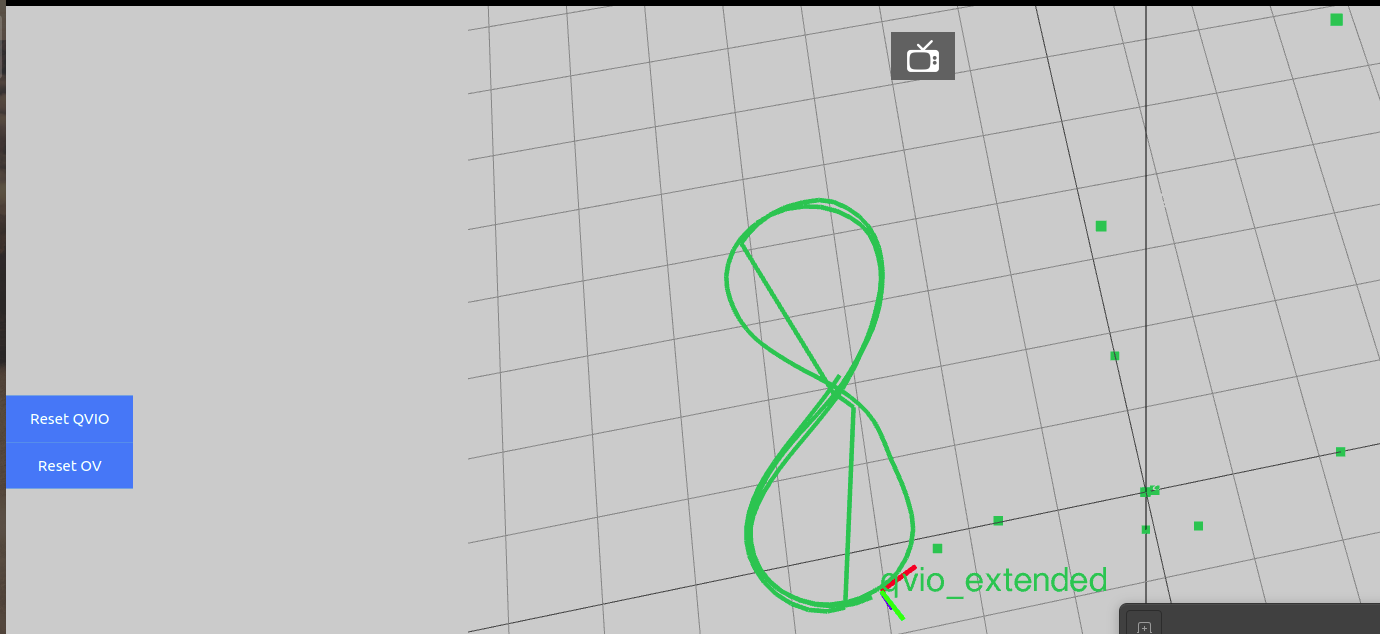

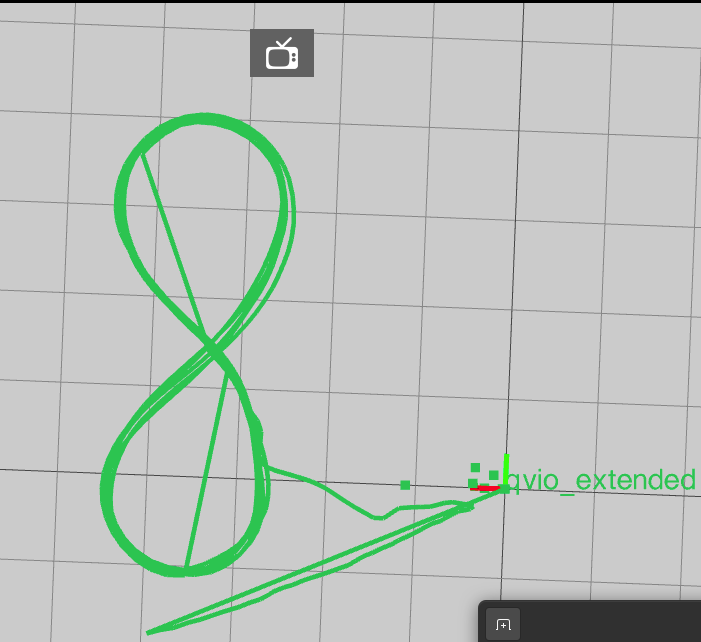
I have followed all the steps in the VIO troubleshooting guide. Nothing seems to help. I've made sure the cameras are clean and are recalibrated ( reprojection error = 0.22). There are enough features ( & illumination) and the quality of QVIO was always high. It is much worse than before and doesn't even work for short distances.
Any help/suggestions would be greatly appreciated
Thank you, -
VIO waypoint navigationposted in VOXL SDK
@Chad-Sweet
The latest release SDK 1.2 tells that now VIO waypoint navigation is now supported.
Could you tell us how we can test the above feature as the documentation doesn't make it clear. -
RE: Starling planning using waypointsposted in Ask your questions right here!
@iparra
I am also currently attempting to do the same. Long waypoint navigation without the drone stopping.
If possible could you tell us what kind of change did you make in the mapper to get this working? -
RE: VOXL2 - Cube Orange External Flight Controller Integrationposted in VOXL 2
Thank you @Eric-Katzfey , it worked, I tested each port individually and made sure the individual ports are working, and then integrated the two and is working fine.
Here is my solution if anyone needs.
I used Telem 1 port of the cube and the UART pins on the J5 connector of USB2 Type A Breakout (M0141) . The parameters I set for MAV 1 is here
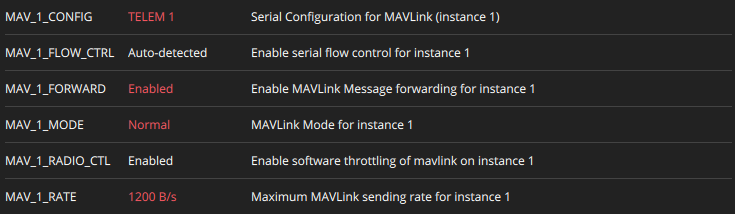

After disabling the voxl-px4 services, Connect to VOXL wifi and check QGC, you'll get the FC data in which the cube is used as the flight controller.
The VOXL ESC, I haven't tested it yet, I'll test and get back if any problems.
-
RE: VOXL2 - Cube Orange External Flight Controller Integrationposted in VOXL 2
Hey @Eric-Katzfey , I tested whatever you told,
- I connected to the UART port on the J5 of M0141, and I tested, it is not working. When using a companion computer you can run
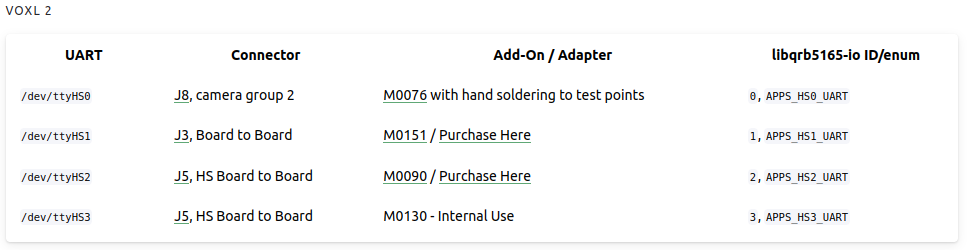
cat /dev/ttyHSxto get data from the FC, you'll get random symbols. I tried it and it is not working, when I tested yesterday with this I got the output as said previously, but still with J5 I tried the pymavlink part by changing the baud rate, but I am getting this output
voxl2:/home$ python3 mavlink_shell.py /dev/ttyTHS1 Connecting to MAVLINK...And what will be the port for the J5 connector of M0141, it is not listed in the below table.
- The VOXL ESC Driver part, I added that to the board config and built, after that I am not able to see any VOXL_ESC parameters.
-
RE: VOXL2 - Cube Orange External Flight Controller Integrationposted in VOXL 2
Thank you @Eric-Katzfey , I'll test this out and get back to you on the result
-
RE: VOXL2 - Cube Orange External Flight Controller Integrationposted in VOXL 2
Hey @Eric-Katzfey , I saw this post and in this you have asked to add the driver to the build configuration, but how do I include the voxl_esc driver to a build of different board configuration?
One more question, can I use the J5 connector of this to connect to the telemetry port of the FC?
-
RE: VOXL2 - Cube Orange External Flight Controller Integrationposted in VOXL 2
@Eric-Katzfey, I'm having a Starling drone setup on my custom airframe build and having integrated external FC, how do I do vehicle actuator setup in QGC once I'm done setting up external FC?
-
RE: VOXL2 - Cube Orange External Flight Controller Integrationposted in VOXL 2
@tom yes, I have done that.
-
VOXL2 - Cube Orange External Flight Controller Integrationposted in VOXL 2
Hello @Chad-Sweet @Eric-Katzfey @tom @Alex-Kushleyev ,
I'm using VOXL2 as a compute unit and need to connect a external flight controller for port availability and other feasibility needs. In my application, I'm using Pixhawk standard Cube Orange as external FC.
For hardware integration, I'm referring to the documentation as listed here as a model reference.
-
I'm integrating the the USB3/UART Add-On Board (M0125) to VOXL 2 (M0054) which giving a 4 pin JST GH connector with a UART available at /dev/ttyHS1 from the applications processor.
-
I'm connecting the 4 pin JST type Output to the Cube Orange's Telemetry (TELEM1) port using 4 Ping JST GH connector to 6 pin GH Connector.
-
In VOXL2, under
/etc/modalai/voxl-mavlink-server.conf, I set external_ap_flight_controller paramater to true instead of default. -
In QGC, once I check by connecting the debug port of Cube to host PC through a USB data cable, under mavlink console upon checking using mavlink status, I receive the following outputs,
mavlink status instance #0: mavlink chan: #0 type: GENERIC LINK OR RADIO flow control: OFF rates: tx: 487.3 B/s txerr: 0.0 B/s tx rate mult: 1.000 tx rate max: 2880 B/s rx: 0.0 B/s rx loss: 0.0% FTP enabled: NO, TX enabled: YES mode: Minimal Forwarding: Off MAVLink version: 1 transport protocol: serial (/dev/ttyS4 @57600) instance #1: mavlink chan: #1 type: GENERIC LINK OR RADIO flow control: OFF rates: tx: 601.9 B/s txerr: 0.0 B/s tx rate mult: 0.306 tx rate max: 1200 B/s rx: 0.0 B/s rx loss: 0.0% FTP enabled: YES, TX enabled: YES mode: Normal Forwarding: On MAVLink version: 1 transport protocol: serial (/dev/ttyS0 @921600) instance #2: mavlink chan: #2 type: GENERIC LINK OR RADIO flow control: OFF rates: tx: 817.9 B/s txerr: 0.0 B/s tx rate mult: 0.306 tx rate max: 1200 B/s rx: 12875.7 B/s rx loss: 125.2% Received Messages: sysid: 1, compid:197, Total: 47361 (lost: 5999736) sysid: 1, compid:196, Total: 568 (lost: 24) FTP enabled: YES, TX enabled: YES mode: Normal Forwarding: On MAVLink version: 2 transport protocol: serial (/dev/ttyS1 @921600) instance #3: GCS heartbeat valid mavlink chan: #3 type: USB CDC flow control: ON rates: tx: 32408.2 B/s txerr: 0.0 B/s tx rate mult: 1.000 tx rate max: 100000 B/s rx: 20.9 B/s rx loss: 0.0% Received Messages: sysid:255, compid:190, Total: 1196 (lost: 0) FTP enabled: YES, TX enabled: YES mode: Config Forwarding: On MAVLink version: 2 transport protocol: serial (/dev/ttyACM0 @2000000) ping statistics: last: 34.42 ms mean: 17.87 ms max: 426.75 ms min: 0.28 ms dropped packets: 0 nsh>Is this the recommended method of integrating an external FC with VOXL2? How do I verify further to know that my external FC is being used instead of VOXL's internal FC?
Assuming, I'm having a custom Starling drone setup on my hardware build and integrating external FC, how do I do vehicle actuator setup in QGC once I'm done setting up external FC?
-
-
RE: PX4 Firmware flashing - Flight Core V2posted in Flight Core v2
@Jetson-Nano any other method which could be tried out to flash the fc_v2?
-
RE: PX4 Firmware flashing - Flight Core V2posted in Flight Core v2
@tom tried out the same as you told, kept the fc_v2 connected to USB after opening firmware page section. Was observing the page section for couple of minutes, received no response. On checking the terminal using
sudo dmesg -wH, the USB enumeration error(address not found) error same as earlier is thrown. -
RE: PX4 Firmware flashing - Flight Core V2posted in Flight Core v2
@tom yes, I get into this page and as mentioned earlier trying QGC build 4.3.
-
RE: PX4 Firmware flashing - Flight Core V2posted in Flight Core v2
@tom yes, while using QGC, I connect and wait for sometime, but the firmware upload option doesn't appear. I try reconnecting but still the same.
Similarly while trying to use the python script, I start the flash sequence but since serial port allocation is'nt reflected the program throws runtime.
-
RE: PX4 Firmware flashing - Flight Core V2posted in Flight Core v2
@tom @Eric-Katzfey anything that I can try out here to flash fc_v2?
-
Uploading PX4 firmware on Flight Core v2 through VOXL2posted in Flight Core v2
Hello @tom @Chad-Sweet
Can PX4 firmware be uploaded on Flight Core v2 through VOXL2? While flashing SDK for VOXL2 can Flight core V2 be connected as external flight controller via UART and firmware be uploaded?
-
RE: PX4 Firmware flashing - Flight Core V2posted in Flight Core v2
Hey @tom @Eric-Katzfey
As depicted earlier, I have used a Class 4 - SD card(16 GB) for the FCv2. I have tried running the command,
sudo dmesg -wH. I get the following error again, the device is not able to enumerate the fcv2.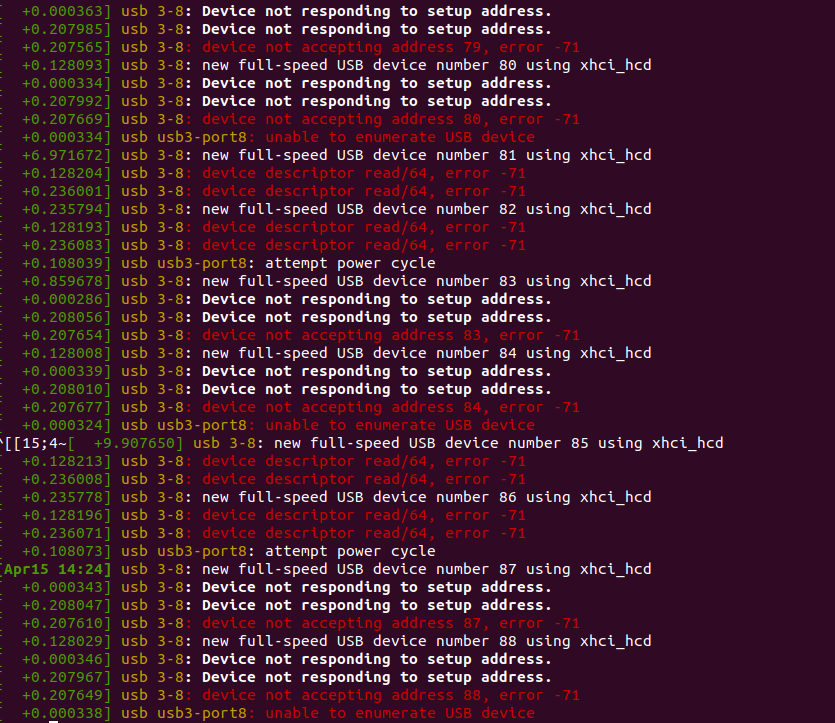
Also, the cable I used works with other industrial flight controllers. Checked with different ports and cables too. Is there force boot switch on fcv2 which is to be enabled?
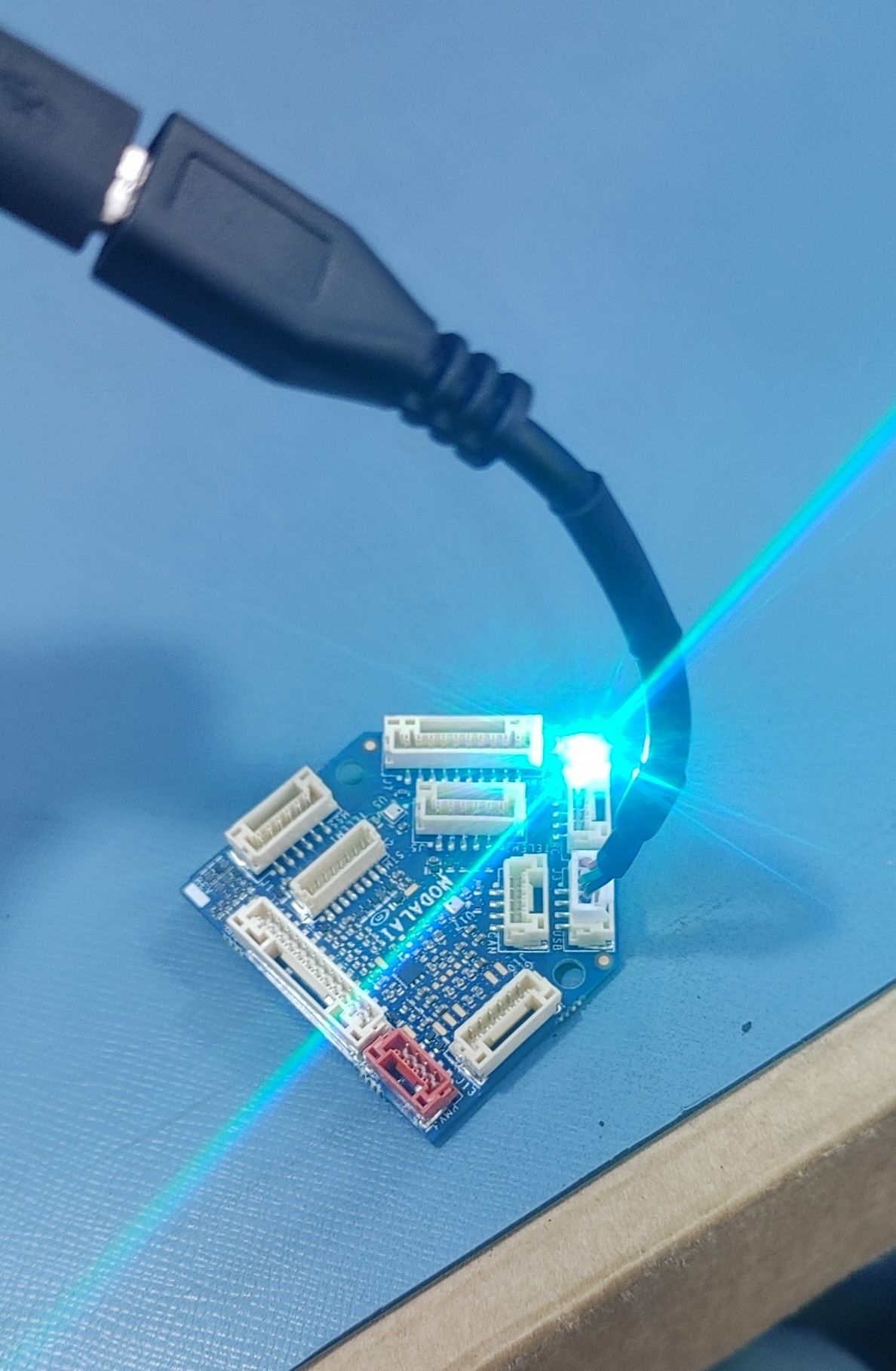
Above is the image of the flight core V2 after flashing of LED once powered or connected via USB UART. I'm using MCBL-00010 type connector as recommended.
Is there a way to flash the fc_v2 via VOXL2. Connecting the fcv2 as external flight controller to VOXL2 as prescribed here ?