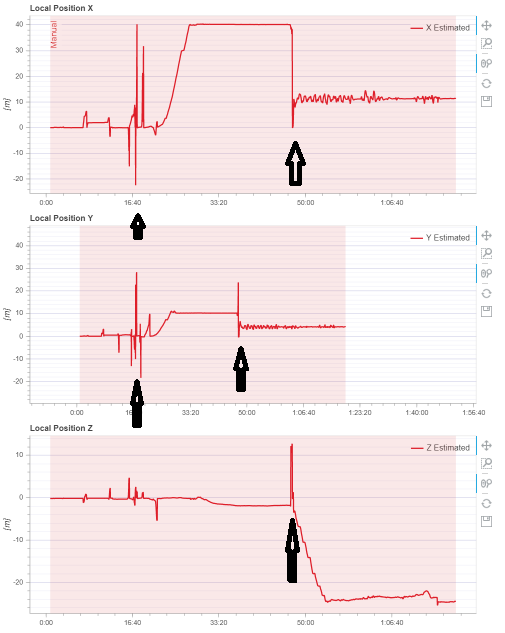
Looking at your mavlink log on estimator_visual_odometry_aligned, I can confirm VIO resetting to 0 at the moment your local position resets (picture #1).
(pic 1)
[image: 1659554580119-screenshot-from-2022-08-03-12-22-32.png]
On a rover typically VIO will reset on 3 situations (everything else working normally as specified):
Fast yaw transitions (I do see a large manual input/actuator output around that time--indicated on pic #2). To solve this, have your vehicle turn/tuned slower on yaw motions.
auto-exposure not keeping up with rapid lighting conditions (high noon sunlight + tree shadows), the
too much vehicle vibration (e.g. treads).
From the logs it appears you have a max yaw/roll input into the rover, that indicates scenario #1 above. If you slow down you yaw movements may solve the problem, please try that 1st (there are other, more complicated options).
(pic 2)
[image: 1659554883412-screenshot-from-2022-08-03-12-26-11.png]
What you can do aside from following the vio troubleshooting guide is to monitor the vio stream on QGC. In order to do that, you need to edit the voxl-streamer service file on VOXL. Basically:
login to VOXL
edit /etc/systemd/system/voxl-streamer.service
on the Exec line that says /usr/bin/voxl-streamer, append to the end of it "-c qvio-overlay".
cycle power and QGC video should show the VIO debug video (and not the high resolution stream), showing at the top: vio xyz position and number of features
Run thru your test again to recreate the error, when it occurs, keep in mind the number of features, if it drops under 5, you'll see vio reset confirming the reset is due to one of 3 scenarios above. If not, post a video of that as it would be a configuration issue & we'd need to see the video stream on what's happening to debug further. Good luck.