Same here, mine died after about 40hrs of operation. I suspect is thermal damage
D
DavidTorres
@DavidTorres
Posts
-
Alfa WiFi dongle not working -
Starling 2 Max C28 + ToF Upgrade – Request for Front Mount 3D Model -
Starling 2 Max for indoor stock control – indoor flight & software integration questionsHello @Pablo-Tarancón
My two cents as user and developer with Starling 2:
The drone would operate indoors with a ceiling height of approximately 3 meters. Is this height sufficient for safe and stable flight? Are there known limitations or risks when flying in such confined indoor spaces?
It depends on how you plan to use it: with pilot in the loop or completely autonomously? Technically there is absolutely no problem with 3m, even flying through shelves. Starling 2 runs VIO algorithm for localisation allows no GPS (indoors) operation, although VIO drifts: This is way more than enough if pilot is on the loop, correcting for the drift.
For fully autonomous flight, VIO drift must be compensated; typically using visual references such as AprilTags (already implemented in ModalAI stack) or a SLAM approach (which the algo doing VIO, OpenVINS, is capable of but AFAIK it is not used). Performance depends strongly on lighting, scene features, etc, so real-world testing is essential.
Is the Starling 2 Max suitable for indoor stock control or inventory management applications?
I cannot guarantee but, technically, if you implement the missing algorithms yourself I see no issue.
Are APIs, SDKs, or technical documentation available to support custom integration?
See docs here, how to build native custom apps and ROS apps
Flight controller and onboard software. Which software or firmware comes pre-installed on the flight controller?
FC is ModalAI's branch of PX4.Ardupilot seems also possible. Main controller is ModalAI's flavor of Ubuntu incl. their SDK.
What built-in safety features are available (collision avoidance, emergency stop, geofencing, etc.)?
You have online mapping and path planning, ideal for fully autonomous operation. The main idea is you use the ToF camera depth + VIO to create a map of your surroundings on the fly. Then use this map for path planning. PLEASE note the disclaimer in the docs: This is the one of the most tricky algos to get reliable, so you would have to test intensively and, potentially make SW and HW changes, to guarantee reliable operation.
Is a “return to home” or similar failsafe function available for indoor operation?
Land mode should be possible to configure as failsafe
Any insights, experiences, or recommendations would be very welcome.
Please note this is a development drone intended for companies and research groups, not a finished product.
I hope it helps
-
Starling 2 Max no GPS dataHello all,
I have a Starling 2, and I was experiencing the same issue where the GPS would not get a fix. After some debugging, here’s how I managed to “solve” it.
The root cause seems to be EMI. When placing the receiver as shown in the first image, I was able to reach ~40 dB signal strength, compared to only ~8 dB in the original location. I understand this is a development drone and that the design prioritizes robustness, so GPS placement is not straightforward.
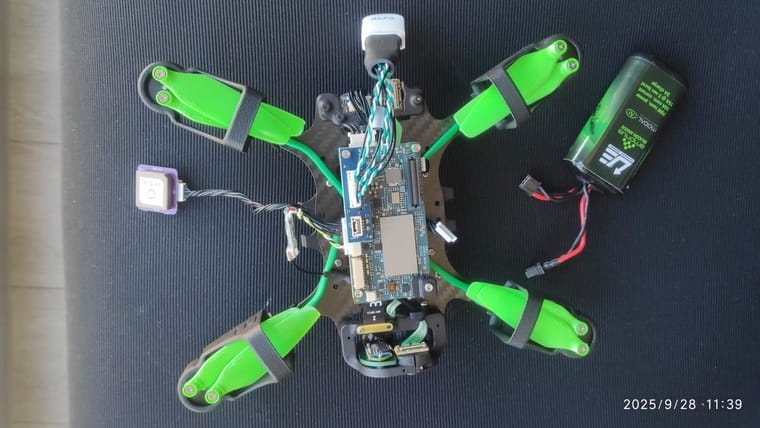
I tried many of the suggestions mentioned in this and related threads, but the only two approaches that consistently improved signal strength enough to achieve a fix were:
- Increasing the distance between the GPS receiver and the rest of the electronics (some manufacturers recommend >10 cm).
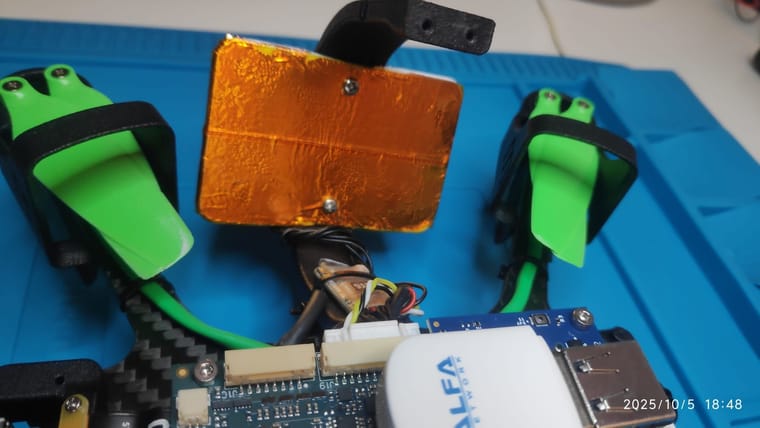
- Shielding the receiver.
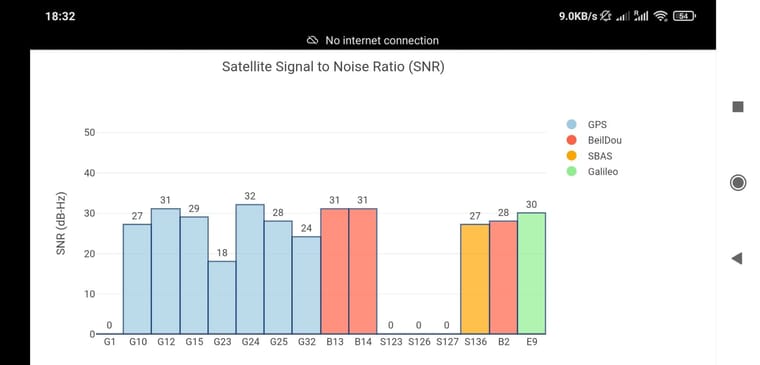
After experimenting with several designs, the setup shown below gave me ~30 dB signal strength while still allowing WiFi functionality, adequate cooling, and a compact profile that won’t break in case of a crash. For shielding, I used copper foil and Kapton tape (as an extra precaution).
With this arrangement, I can now get a fix quickly and achieve about ~1.5 m HDOP.
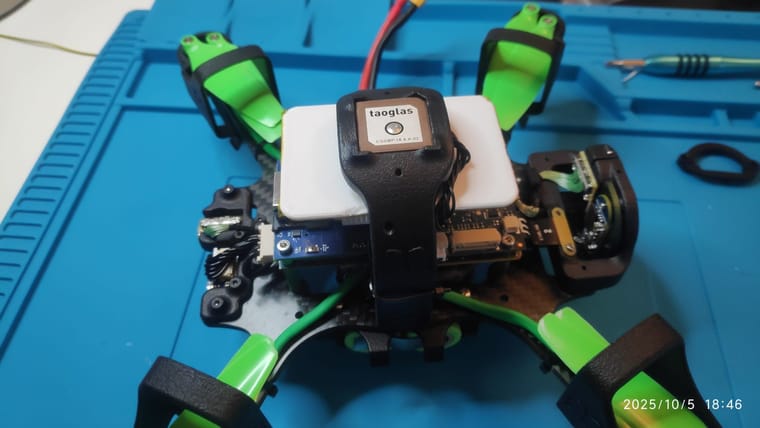
I’m sharing the STL file here in case anyone else finds it useful. Hopefully it helps others experiencing the same issue!
https://cad.onshape.com/documents/09d5e2f9cd88026c26cc7f0f/w/477eee1375596be3c9e530ed/e/1fbd7ed82367117110cba263The only downside is that the design isn’t exactly pretty—but I’m sure the ModalAI team will come up with a more elegant solution soon
")
https://forum.modalai.com/topic/3879/gps-not-working-for-starling-2-max
https://forum.modalai.com/topic/3912/problem-acquiring-gps-satellites-possible-voxl2-board-emi