@Cliff-Wong Hi there. Thank you for answering my questions. We’re still using the same voxl-open-vins-server.conf settings with "en_vio_always_on": false and "en_auto_reset": true. I also updated the system to SDK 1.5.0 as suggested, but unfortunately, it didn’t seem to resolve the issue.
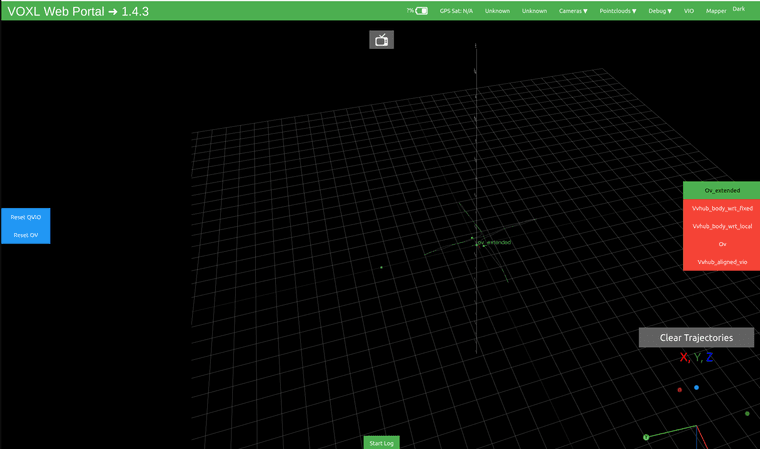
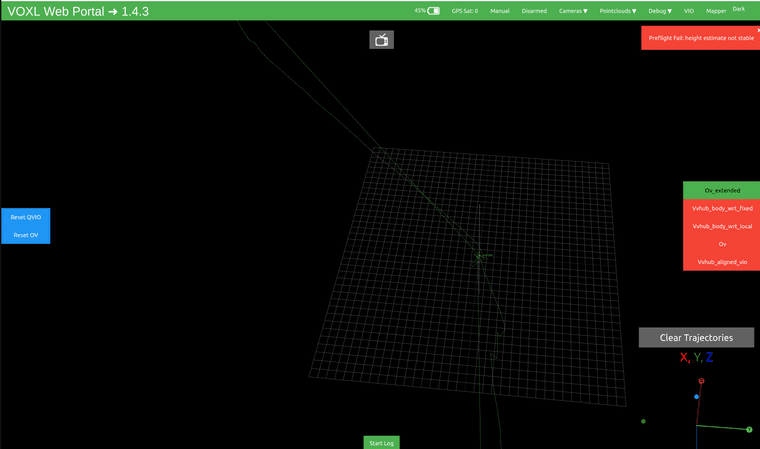
To further investigate, I tested VIO performance by holding the drone in my hand and moving it manually while observing the trajectories in the VIO visualization. I noticed two distinct trajectories being displayed: QVIO and OV. Sometimes the OV trajectory appears more accurate when I move the drone in a “plus” pattern, and sometimes the QVIO trajectory is more accurate, but most of the time it tends to drift significantly, and sometimes QVIO doesn't move at all.
I have two questions:
1-) What is the difference between QVIO and OV, and which one is actually used during flight for position estimation?
2-) What could be causing QVIO to fail to track properly, while OV performs well? (or the other way around)
Also, I'm not getting any 'manual control lost' errors in QGC, and I'm able to control the drone perfectly fine. However, it doesn't respond to any control inputs on rare occasions, where the drone can't hold its position and continues to ascend when I use VIO in 'Position Hold' mode.