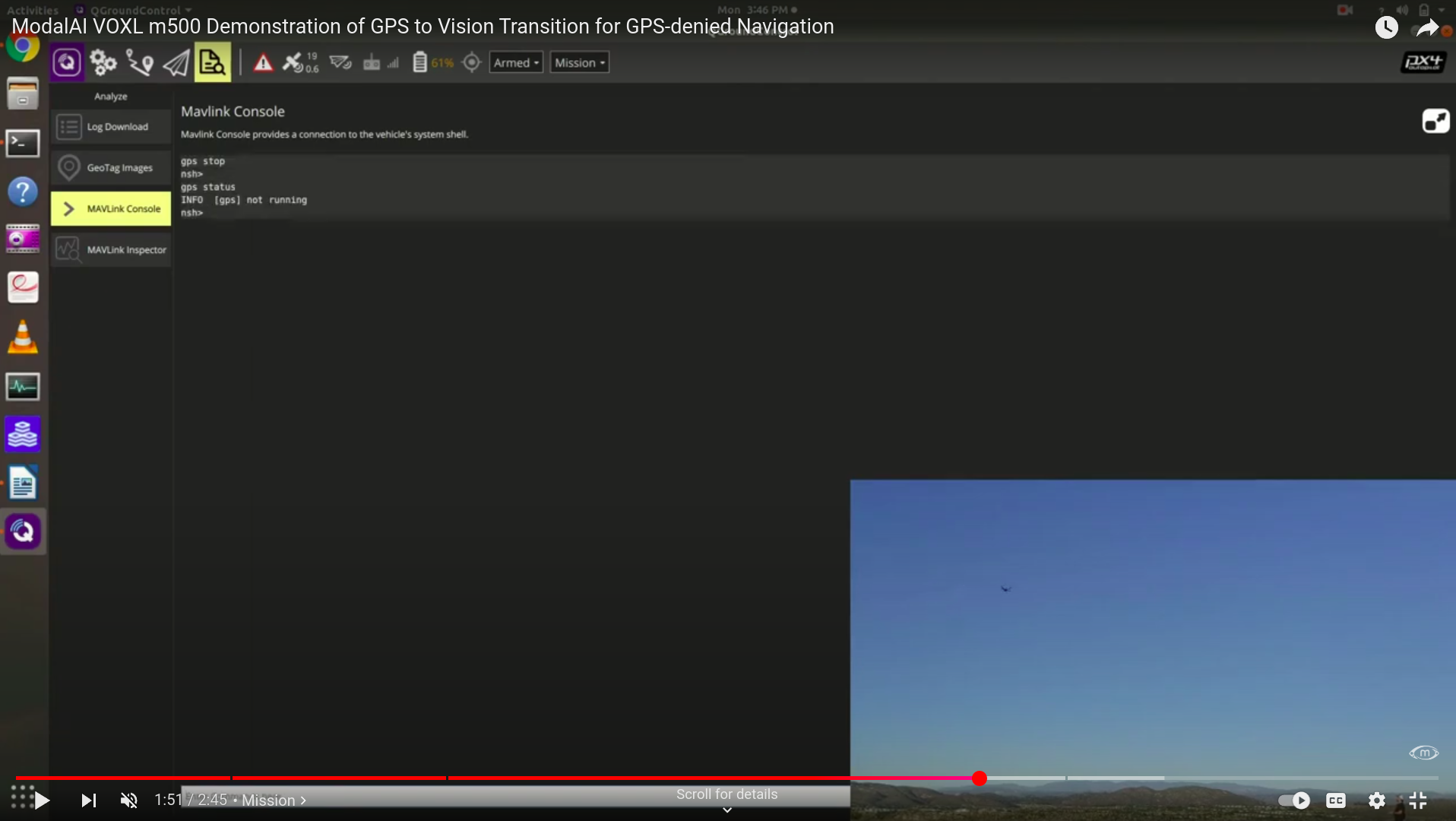
@Cliff-Wong Thanks for your detailed guidance, helps a lot! #2 is actually what I was originally aiming to do, since I am actually doing simulation stuff with PX4 SITL so I can turn off GPS without consequences. Will try the other steps when we are ready to run it on hardware.